









相机畸变原因与去畸变原理与代码
相机主要有两种畸变:径向畸变和切向畸变
径向畸变由透镜形状引起的畸变;
切向畸变由相机组装过程中透镜与成像面不严格平行导致的。
一个畸变效果图:
我们能够看到位于图像边缘位置的直线发生了倾斜;
去畸变方法:发生畸变就需要去畸变,我们经常能够看到用以下的步骤:
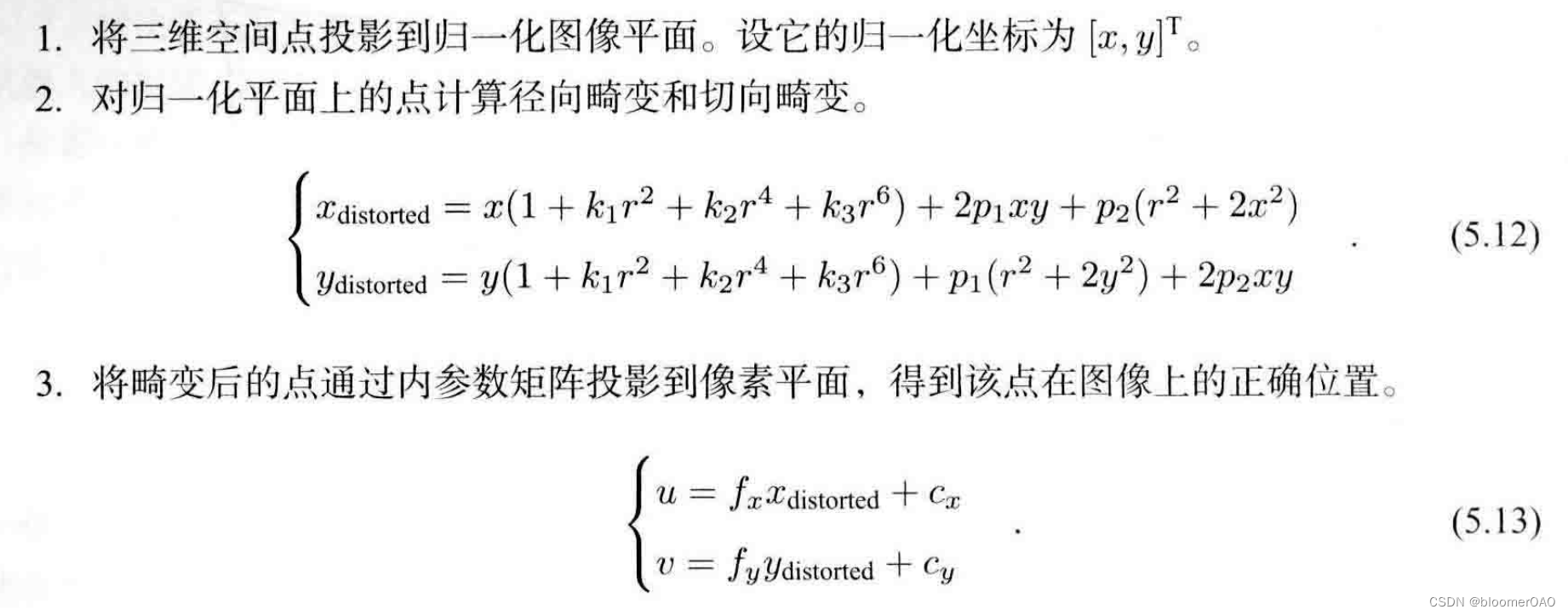
看到这里我感到很疑惑,公式(5.12)是理想归一化坐标经过径向畸变+切向畸变作用后的点,畸变后的点经过内参矩阵就获得了该点在图像中的正确位置。如果公式(5.12)是相机畸变原理的等效公式,那么经过两次同等的畸变作用岂不是畸变的越来越厉害。
正确的理解是:
为了纠正相机的这种畸变作用获得相机坐标系下的点在像素平面上的正确映射位置,即直线对直线,可以先把三维空间的相机坐标系下点投影到归一化图像平面(x,y),之后用畸变纠正参数即k1,k2,k3,p1,p2来提前把(x,y)进行反畸变,这样经过透镜的畸变之后就是三维点在图像上的正确位置了。所以公式(5.12)不是相机畸变原理表达式,而应该是反相机畸变表达式。
实现代码:
#include <opencv2/opencv.hpp>
#include <string>
using namespace std;
string image_file = "./distorted.png"; // 请确保路径正确
int main(int argc, char **argv) {
// 本程序实现去畸变部分的代码。尽管我们可以调用OpenCV的去畸变,但自己实现一遍有助于理解。
// 畸变参数
double k1 = -0.28340811, k2 = 0.07395907, p1 = 0.00019359, p2 = 1.76187114e-05;
// 内参
double fx = 458.654, fy = 457.296, cx = 367.215, cy = 248.375;
cv::Mat image = cv::imread(image_file, 0); // 图像是灰度图,CV_8UC1
int rows = image.rows, cols = image.cols;
cv::Mat image_undistort = cv::Mat(rows, cols, CV_8UC1); // 去畸变以后的图
// 计算去畸变后图像的内容
for (int v = 0; v < rows; v++) {
for (int u = 0; u < cols; u++) {
// 按照公式,计算点(u,v)对应到畸变图像中的坐标(u_distorted, v_distorted)
double x = (u - cx) / fx, y = (v - cy) / fy;
double r = sqrt(x * x + y * y);
double x_distorted = x * (1 + k1 * r * r + k2 * r * r * r * r) + 2 * p1 * x * y + p2 * (r * r + 2 * x * x);
double y_distorted = y * (1 + k1 * r * r + k2 * r * r * r * r) + p1 * (r * r + 2 * y * y) + 2 * p2 * x * y;
double u_distorted = fx * x_distorted + cx;
double v_distorted = fy * y_distorted + cy;
// 赋值 (最近邻插值)
if (u_distorted >= 0 && v_distorted >= 0 && u_distorted < cols && v_distorted < rows) {
image_undistort.at<uchar>(v, u) = image.at<uchar>((int) v_distorted, (int) u_distorted);
} else {
image_undistort.at<uchar>(v, u) = 0;
}
}
}
// 画图去畸变后图像
cv::imshow("distorted", image);
cv::imshow("undistorted", image_undistort);
cv::waitKey();
return 0;
}
结果对比:
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









