






4DRadarSLAM方案部署
欢迎关注我的B站:https://space.bilibili.com/379384819
参考教程:
GitHub - zhuge2333/4DRadarSLAM
Ubuntu20.04LTS上运行4Dradar_slam_20.04 4dradar-CSDN博客
1. 查看系统环境
要运行本仿真程序,需要保证当前环境为ubuntu20.04+ros-noetic-desktop-full
查看ubuntu版本:
rosnoetic@rosnoetic-VirtualBox:~$ lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 20.04.6 LTS
Release: 20.04
Codename: focal
可知,当前ubuntu版本满足20.04
查看ros版本:
rosnoetic@rosnoetic-VirtualBox:~$ rosversion -d
noetic
可知,当前ros版本满足noetic
2. 安装依赖
2.1 安装Eigen3
ctrl+alt+T打开终端,执行如下指令安装Eigen3:
rosnoetic@rosnoetic-VirtualBox:~$ sudo apt update
rosnoetic@rosnoetic-VirtualBox:~$ sudo apt install libeigen3-dev
2.2 安装OpenMP
gcc自带的,如果没有直接安装gcc 。
可以运行下面这条指令,安装gcc(gcc,g++,camke一并全安装上)
rosnoetic@rosnoetic-VirtualBox:~$ sudo apt install build-essential
2.3 PCL安装
ctrl+alt+T打开终端,执行如下指令安装PCL。
rosnoetic@rosnoetic-VirtualBox:~$ sudo apt install libpcl-dev
2.4 安装g2o
ctrl+alt+T打开终端,安装依赖项
rosnoetic@rosnoetic-VirtualBox:~$ sudo apt-get install qt5-qmake qt5-default libqglviewer-dev-qt5 libsuitesparse-dev libcxsparse3 libcholmod3
-
依赖下载过程
下载源码:
GitHub - RainerKuemmerle/g2o: g2o: A General Framework for Graph Optimization
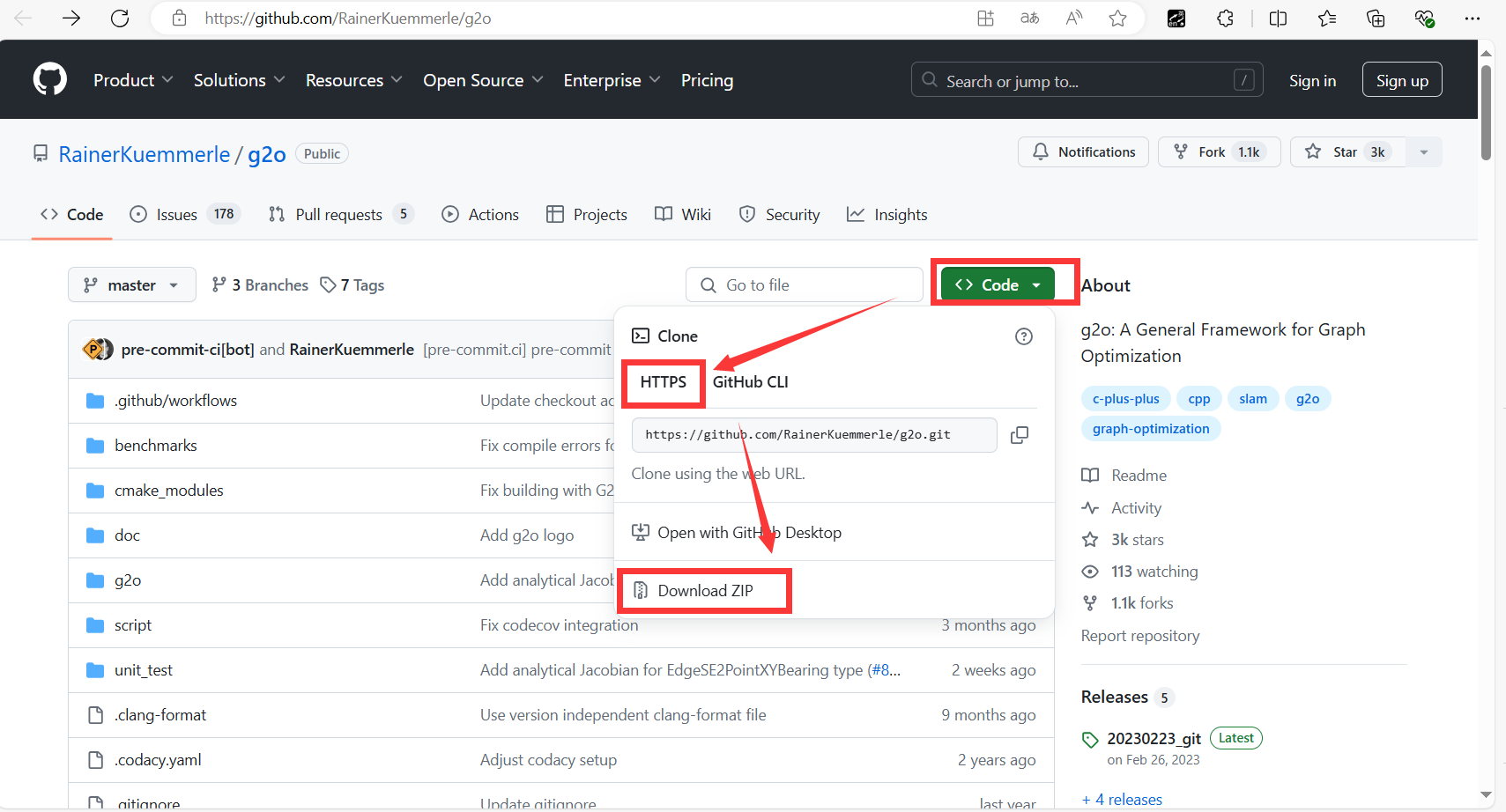
将g2o-master.zip压缩包拖拽至虚拟机的主文件夹下
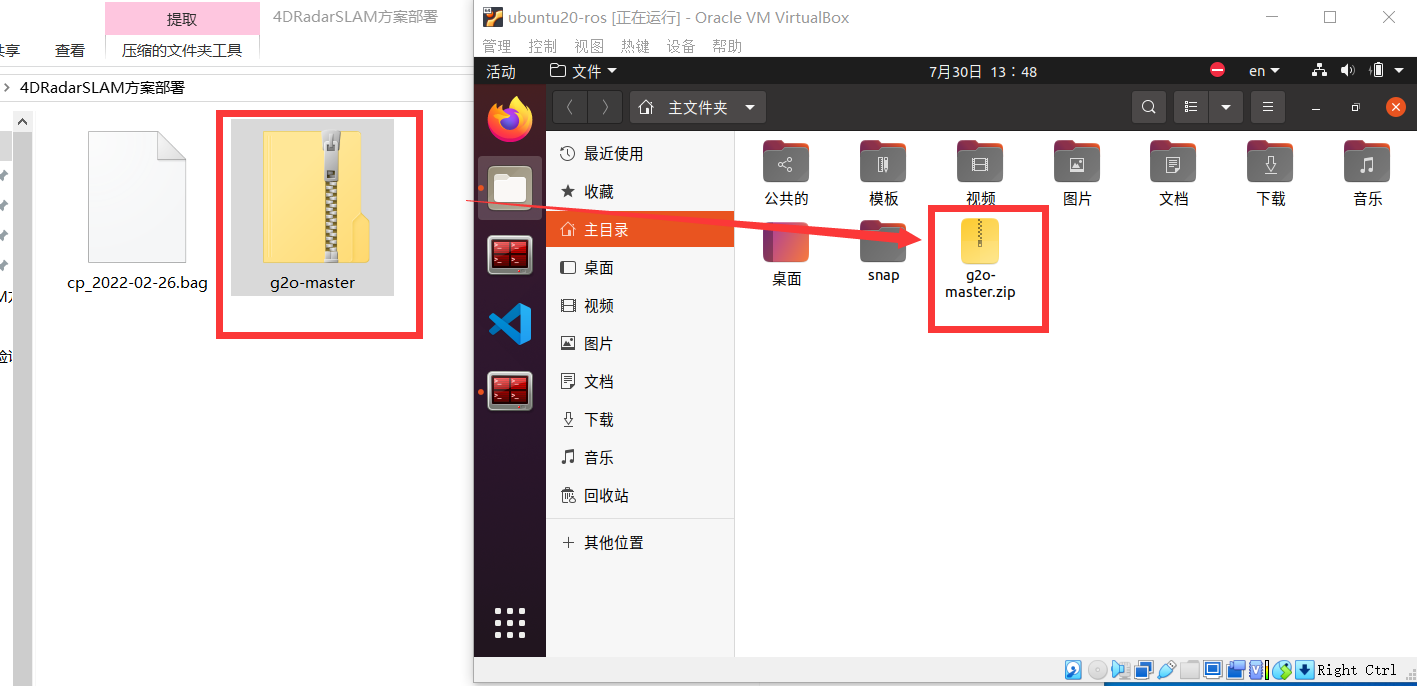
点击g2o-master.zip,右键,选择“提取到此处”
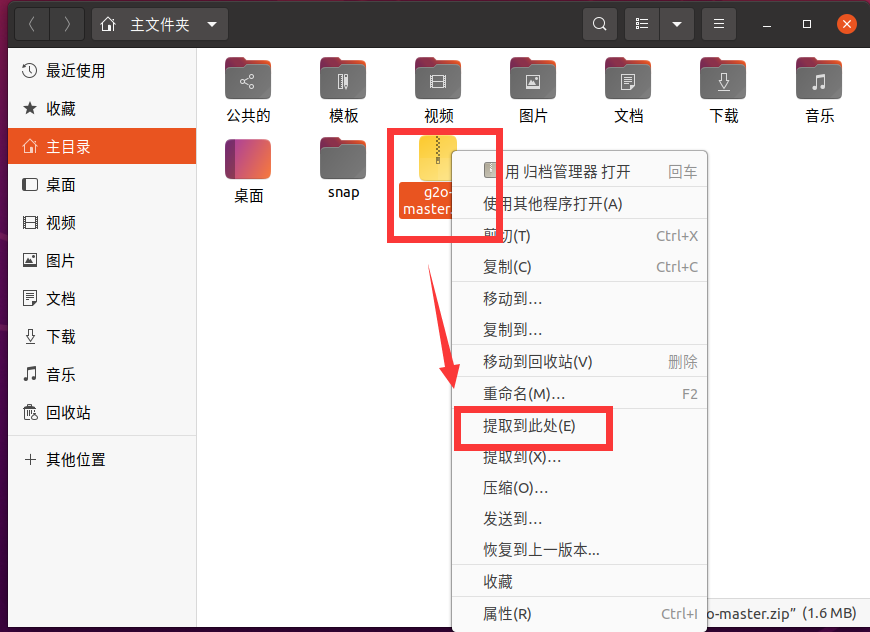
将g2o-master文件夹命名为g2o
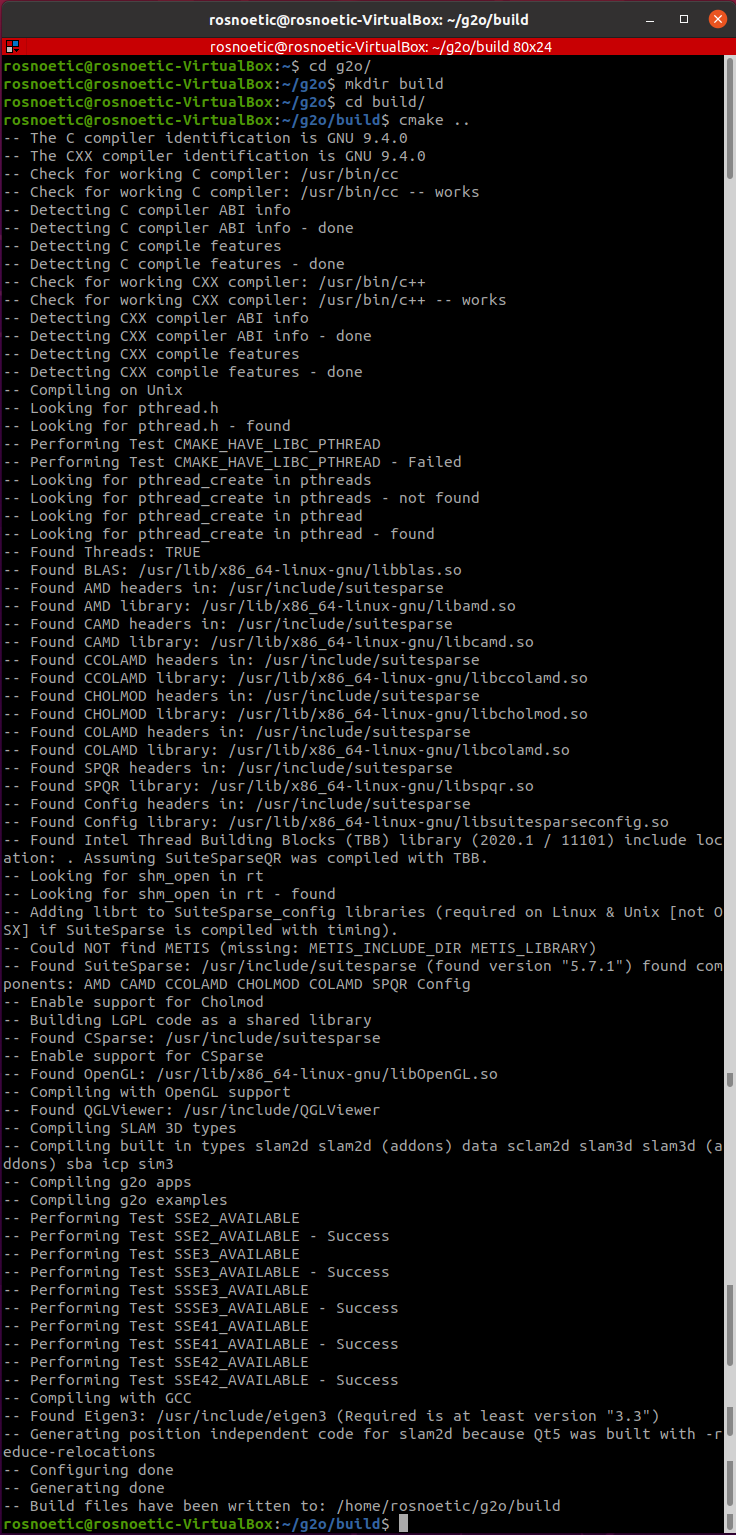
执行如下指令编译g2o
rosnoetic@rosnoetic-VirtualBox:~$ cd g2o/
rosnoetic@rosnoetic-VirtualBox:~/g2o$ mkdir build
rosnoetic@rosnoetic-VirtualBox:~/g2o$ cd build/
rosnoetic@rosnoetic-VirtualBox:~/g2o/build$ cmake ..
-
cmake …
rosnoetic@rosnoetic-VirtualBox:~/g2o/build$ make -j4
-
make -j4

rosnoetic@rosnoetic-VirtualBox:~/g2o/build$ sudo make install
-
sudo make install

2.5 安装gtsam
参考教程:
Ubuntu20.04安装GTSAM,运行LIO-SAM_gtsam4.0.3-CSDN博客
-
增加交换空间
首先关闭交换分区
rosnoetic@rosnoetic-VirtualBox:~$ sudo swapoff /swapfile接着创建分区,
4 * 1024 = 4096创建4 G的内存分区rosnoetic@rosnoetic-VirtualBox:~$ sudo dd if=/dev/zero of=/swapfile bs=1M count=4096
继续执行如下指令:
rosnoetic@rosnoetic-VirtualBox:~$ sudo mkswap /swapfile rosnoetic@rosnoetic-VirtualBox:~$ sudo swapon /swapfile
创建完交换分区之后就可以继续编译。
也可以查看分区的大小
rosnoetic@rosnoetic-VirtualBox:~$ free -m

编译若是还不成功,试着创建更大的分区。
如果编译使用完成后,可以关闭内存。
```cpp
rosnoetic@rosnoetic-VirtualBox:~$ sudo swapoff /swapfile
rosnoetic@rosnoetic-VirtualBox:~$ sudo rm /swapfile
```
进入如下链接下载gtsam压缩包,当前下载的是Release 4.2
Releases · borglab/gtsam (github.com)
将gtsam压缩包拖拽至虚拟机的主文件夹下,
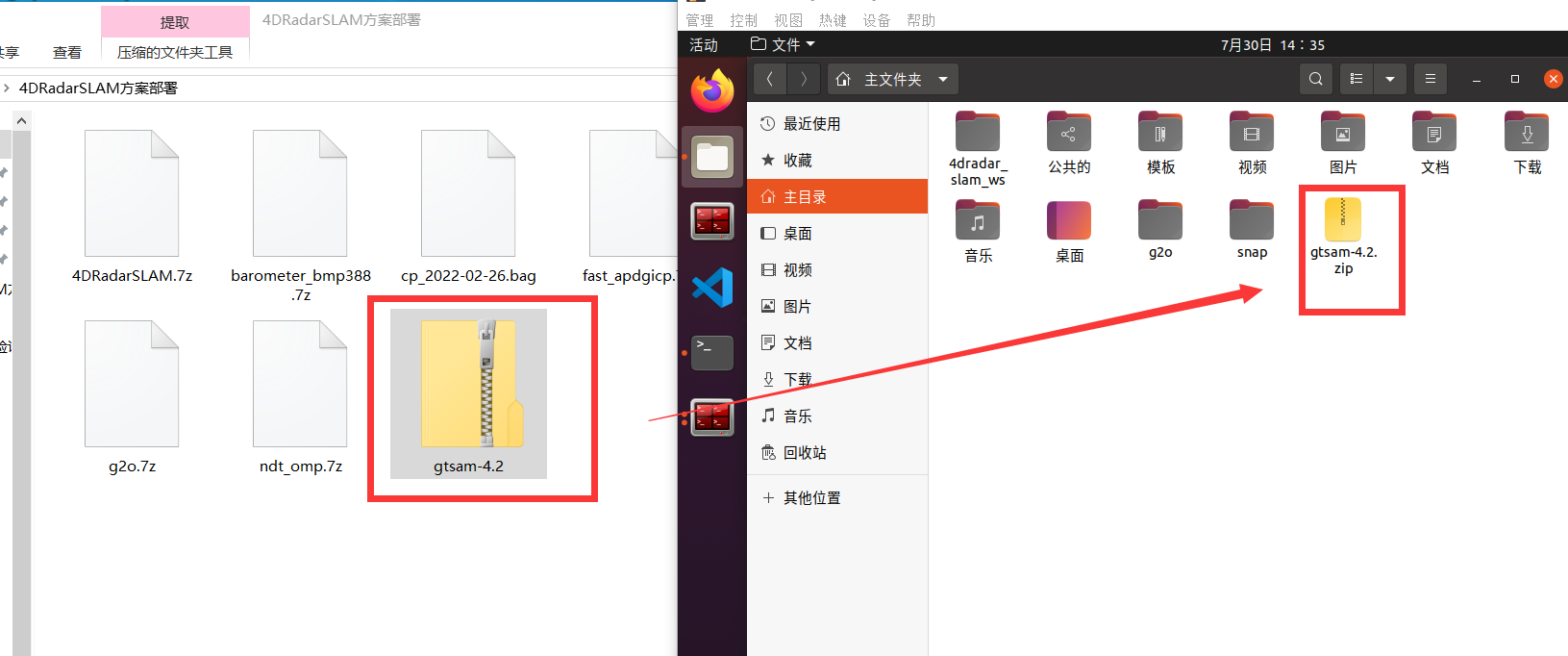
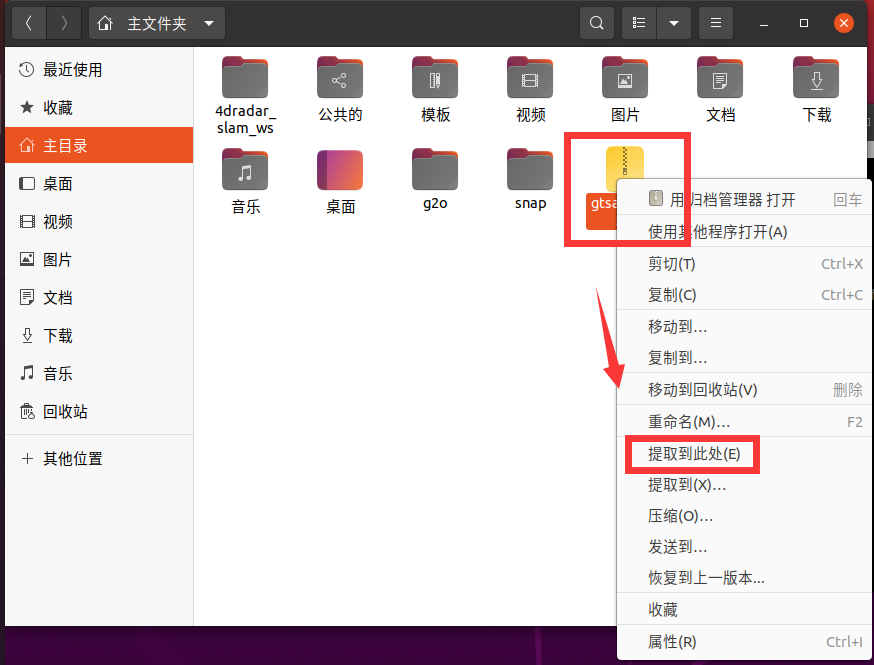
点击gtsam-4.2.zip,右键,选择“提取到此处”
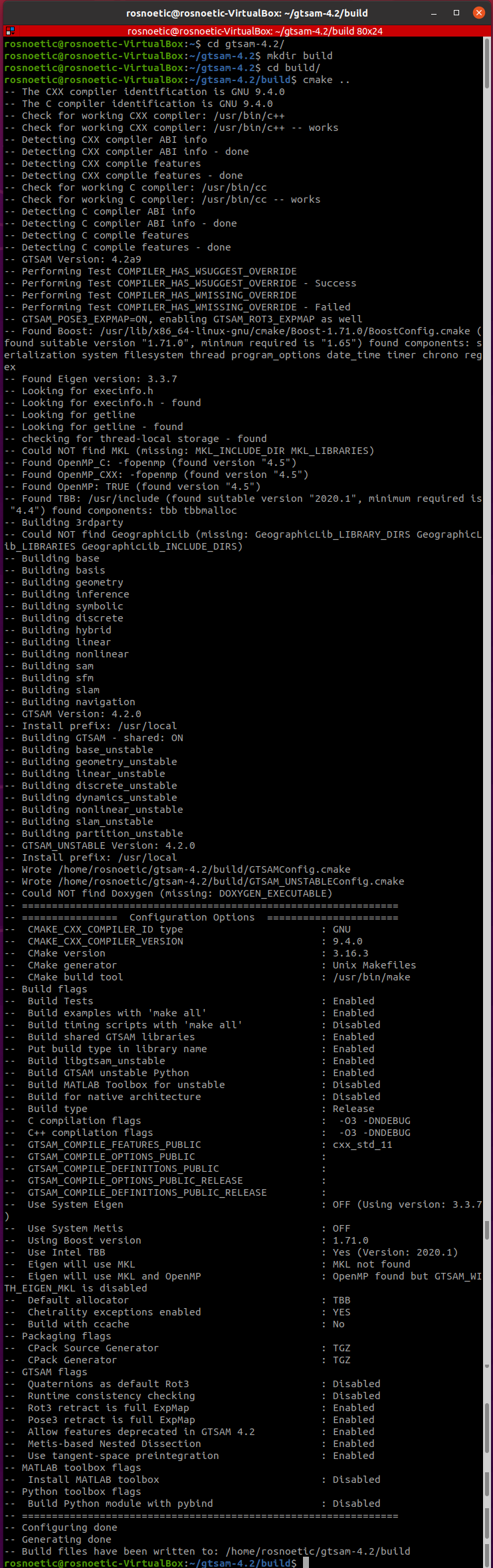
进入gtsam-4.2文件夹下,执行如下指令进行编译:
rosnoetic@rosnoetic-VirtualBox:~$ cd gtsam-4.2/
rosnoetic@rosnoetic-VirtualBox:~/gtsam-4.2$ mkdir build
rosnoetic@rosnoetic-VirtualBox:~/gtsam-4.2$ cd build/
rosnoetic@rosnoetic-VirtualBox:~/gtsam-4.2/build$ cmake ..
-
cmake …
rosnoetic@rosnoetic-VirtualBox:~/gtsam-4.2/build$ make
-
make -j4

rosnoetic@rosnoetic-VirtualBox:~/gtsam-4.2/build$ sudo make install
-
sudo make install

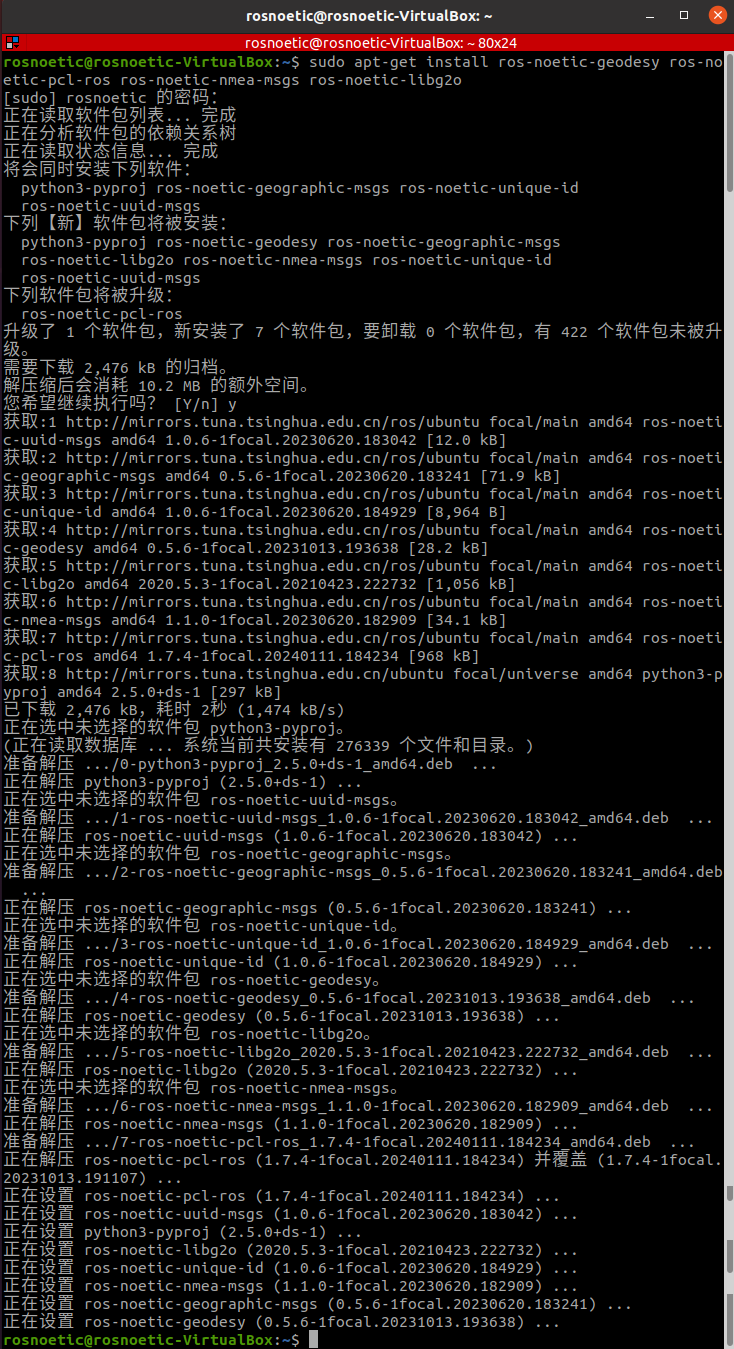
2.6 安装依赖
ctrl+alt+T打开终端,执行如下指令安装依赖:
rosnoetic@rosnoetic-VirtualBox:~$ sudo apt-get install ros-noetic-geodesy ros-noetic-pcl-ros ros-noetic-nmea-msgs ros-noetic-libg2o
-
安装依赖
3. 编译4DRadarSLAM
3.1 创建工作空间
ctrl+alt+T打开终端,执行如下指令创建工作空间
rosnoetic@rosnoetic-VirtualBox:~$ mkdir -p 4dradar_slam_ws/src
3.2 源码下载
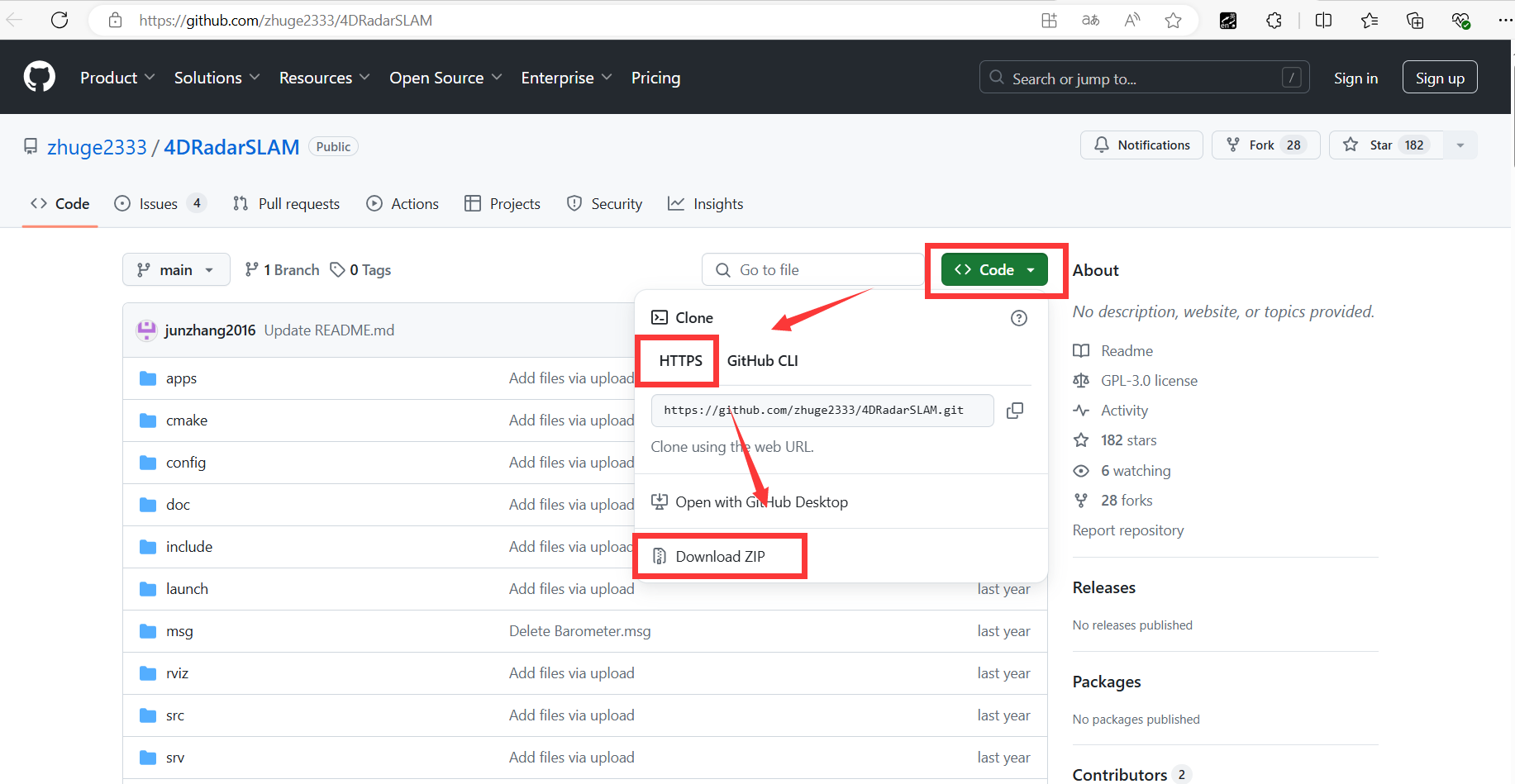
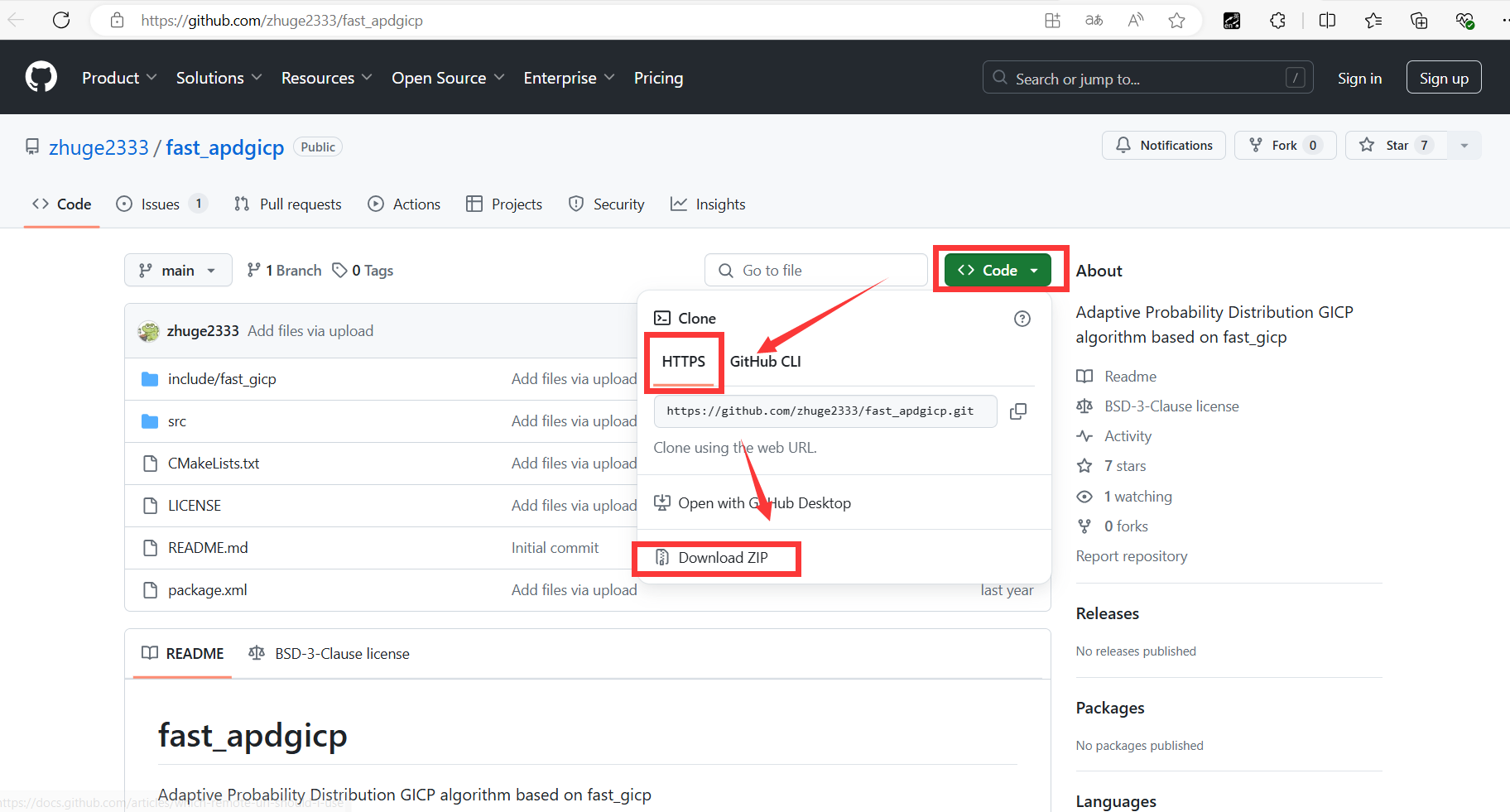
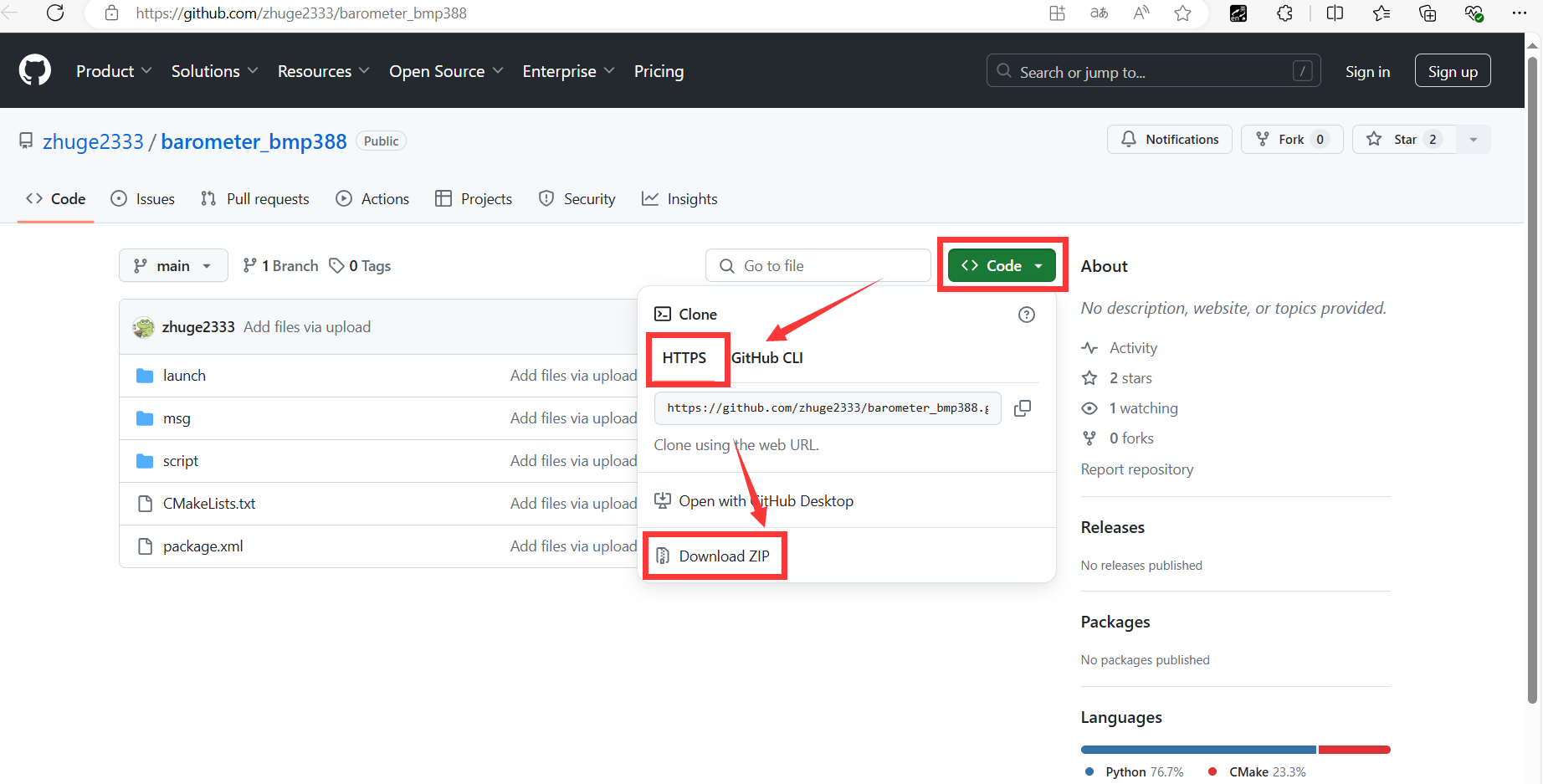
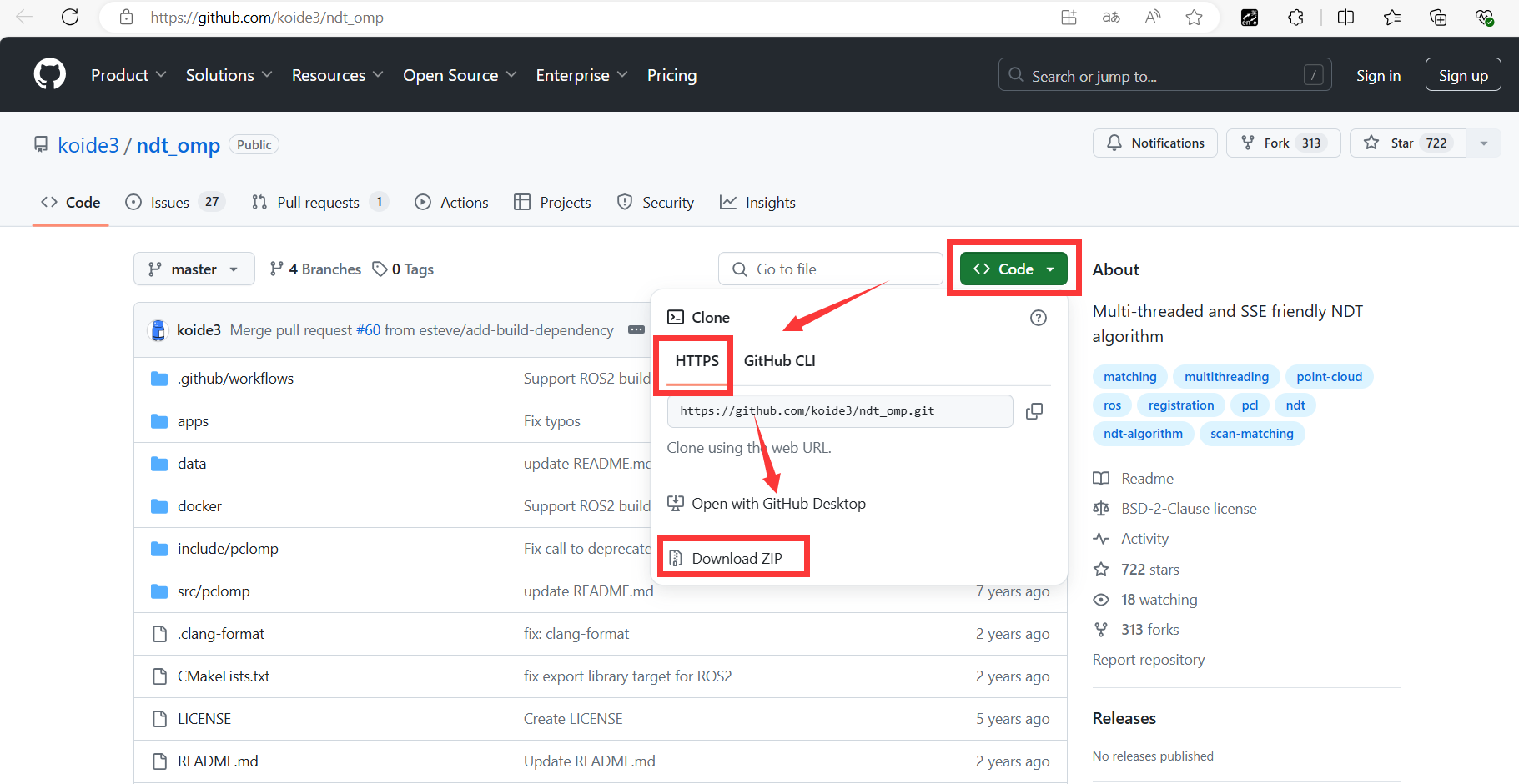
下载4DRadarSLAM、fast_apdgicp、barometer_bmp388、ndt_omp源码:
-
4DRadarSLAM
https://github.com/zhuge2333/4DRadarSLAM
-
fast_apdgicp
https://github.com/zhuge2333/fast_apdgicp
-
barometer_bmp388
https://github.com/zhuge2333/barometer_bmp388
-
ndt_omp
https://github.com/koide3/ndt_omp
当前为了去掉压缩包里面的master字眼,我们人为的对压缩包进行重命名,并压缩:
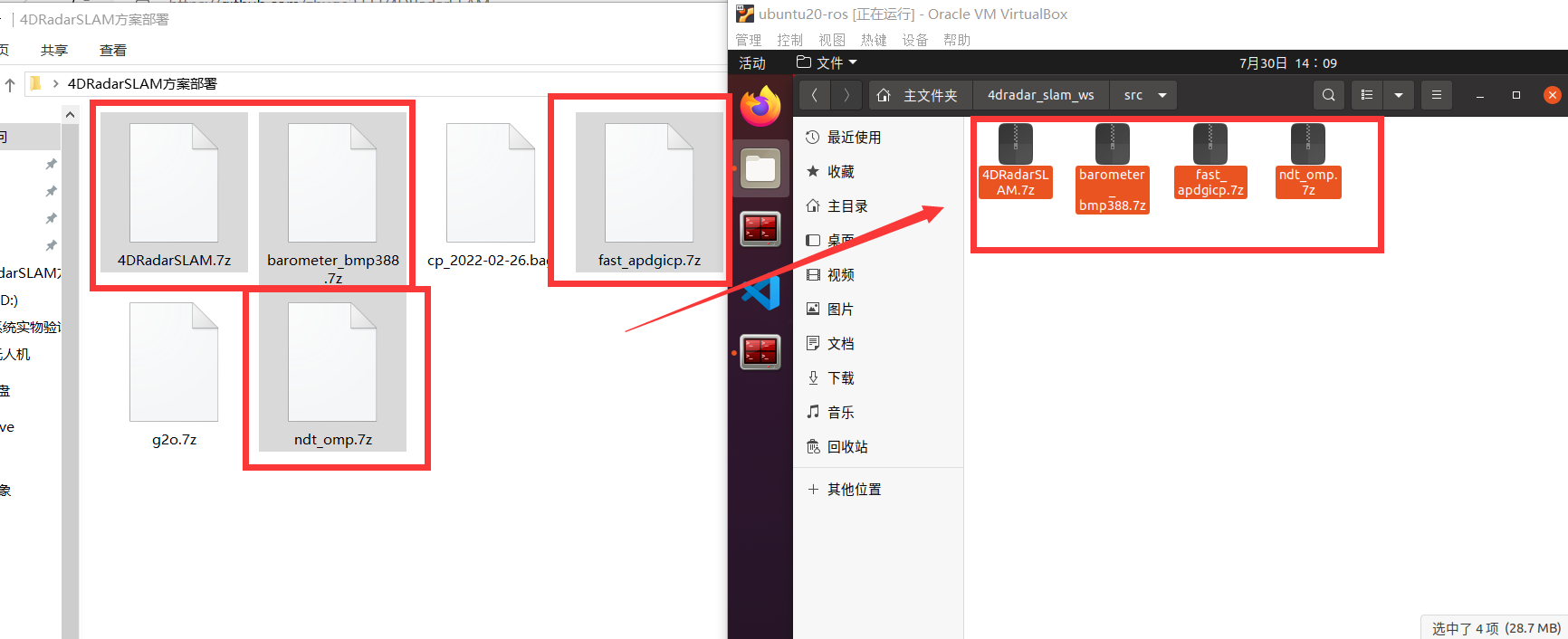
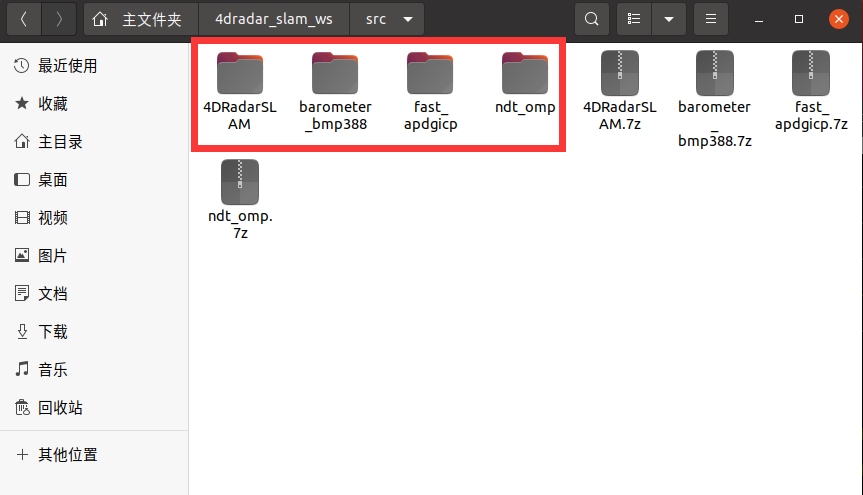
将7z压缩包拖拽至/4dradar_slam_ws/src文件夹下,点击压缩包,右键,选择”提取到此处”:
3.3 编译
ctrl+alt+T打开终端,执行如下指令编译程序:
rosnoetic@rosnoetic-VirtualBox:~$ cd 4dradar_slam_ws/
rosnoetic@rosnoetic-VirtualBox:~/4dradar_slam_ws$ catkin_make
-
catkin_make

4. 运行4DRadarSLAM
4.1 添加数据集
进入如下链接,下载数据集:
https://drive.google.com/drive/folders/14jVa_dzmckVMDdfELmY32fJlKrZG1Afv

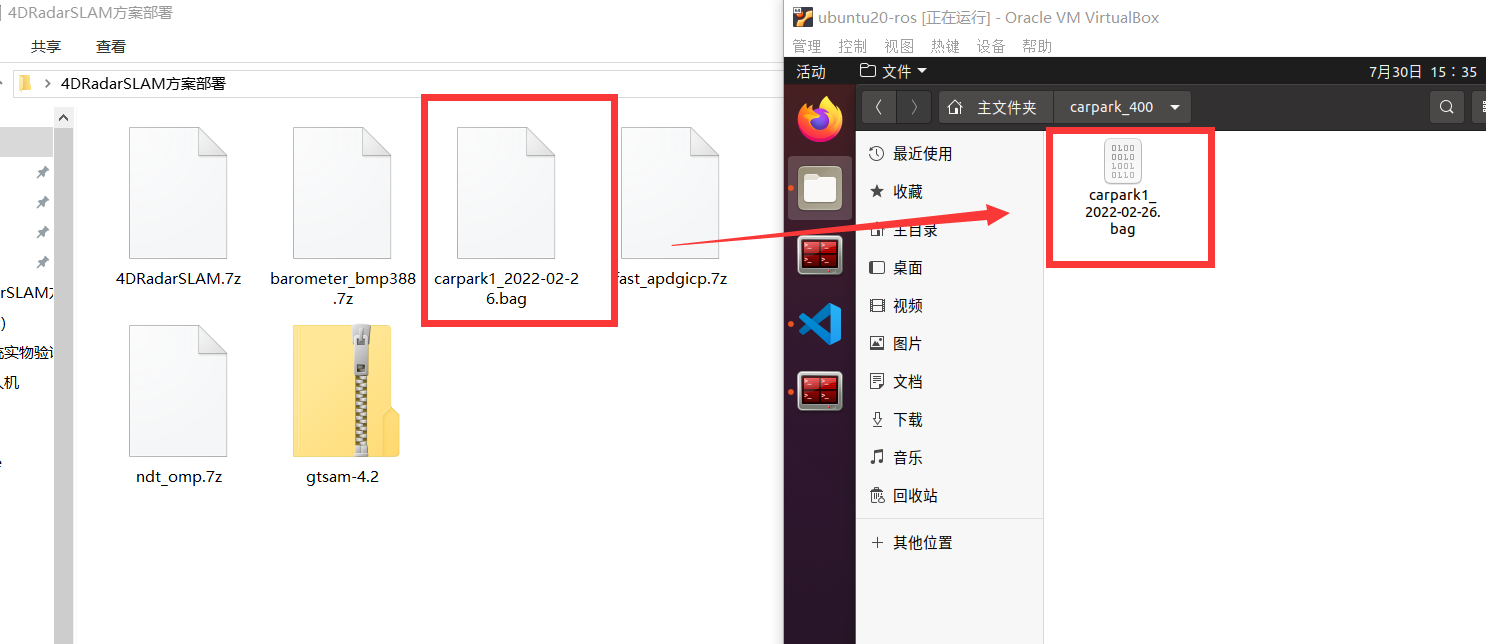
把作者提供的数据集下载下来,ctrl+alt+T打开终端,执行如下指令创建一个文件夹carpark_400:
rosnoetic@rosnoetic-VirtualBox:~$ mkdir carpark_400
将carpark1_2022-02-26.bag数据集拖拽至carpark_400文件夹:
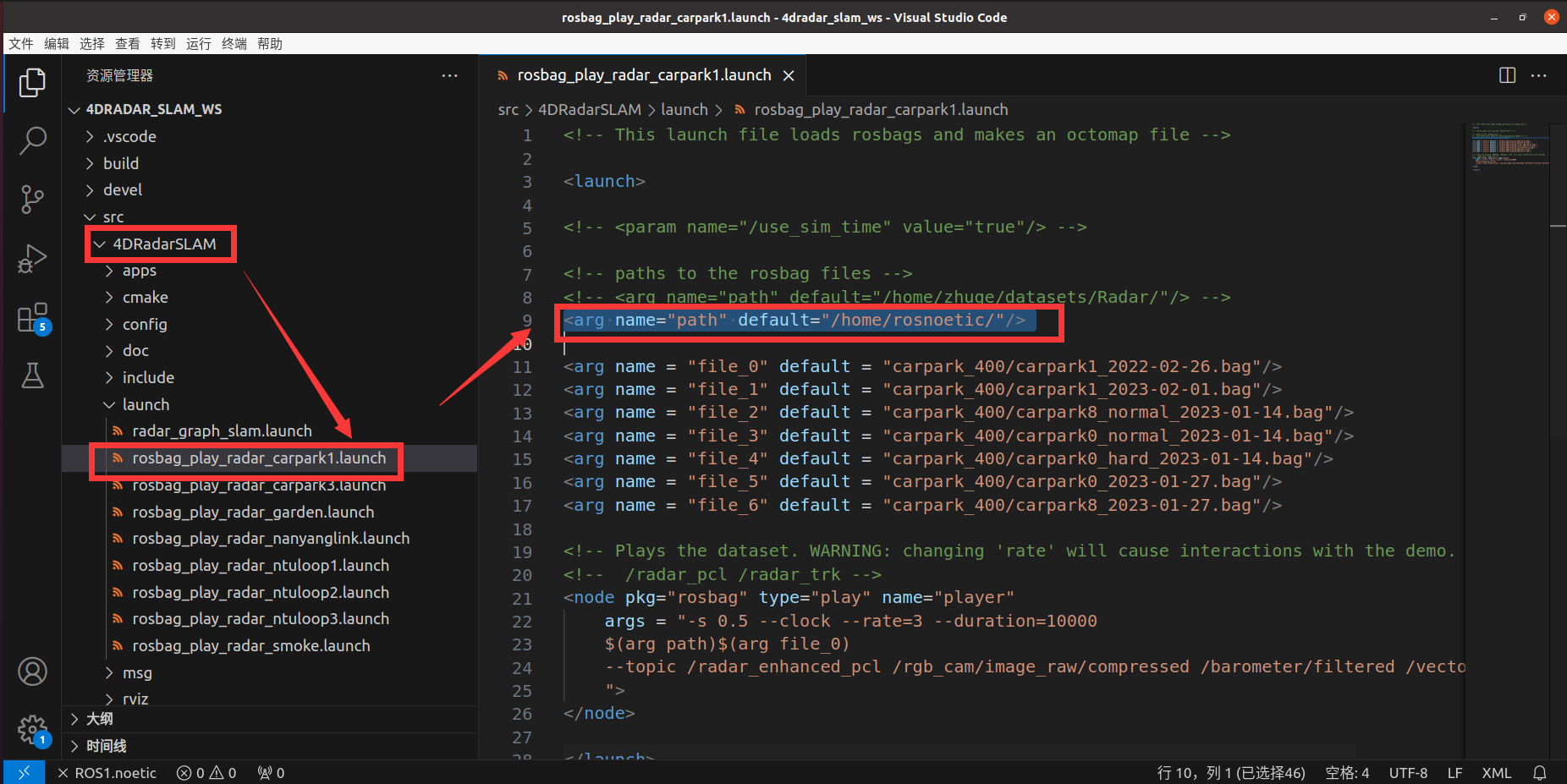
修改launch文件夹中 rosbag_play_radar_carpark1.launch 文件中路径
<arg name="path" default="/home/rosnoetic/"/>
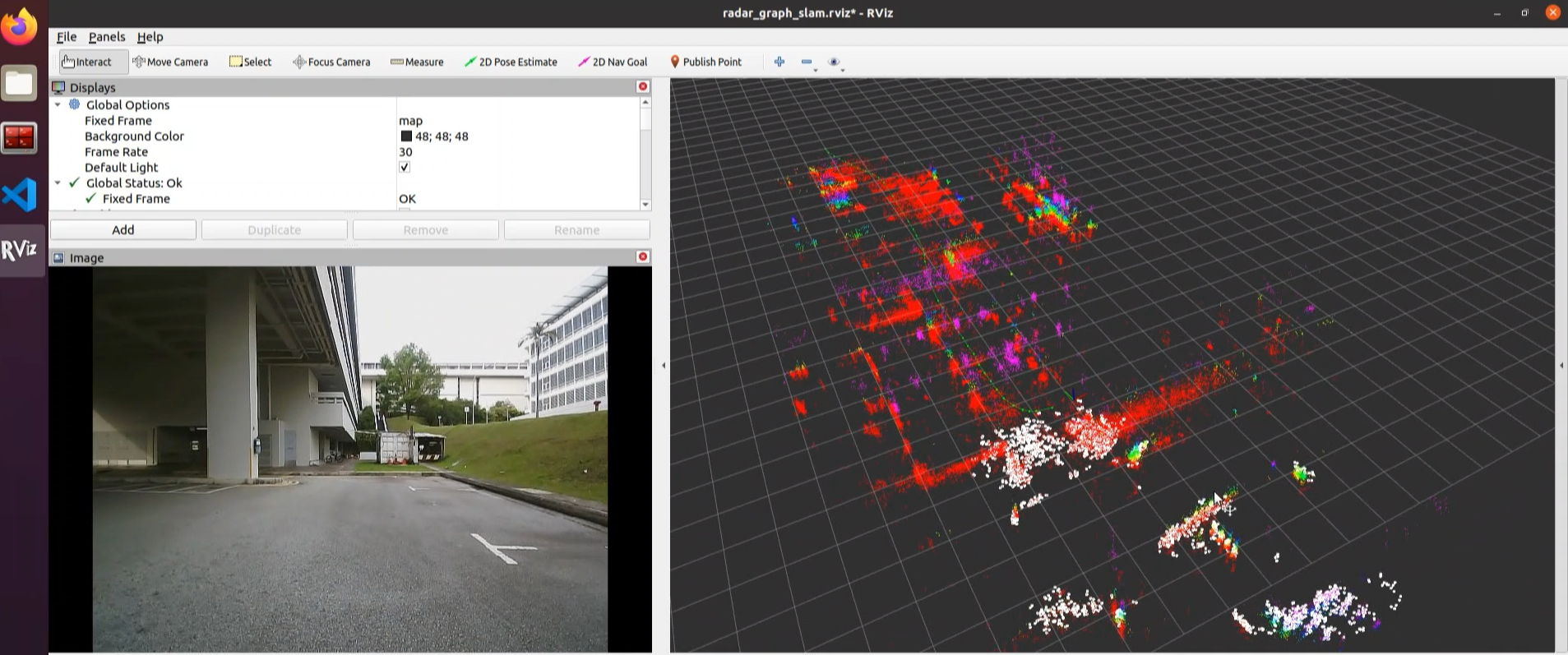
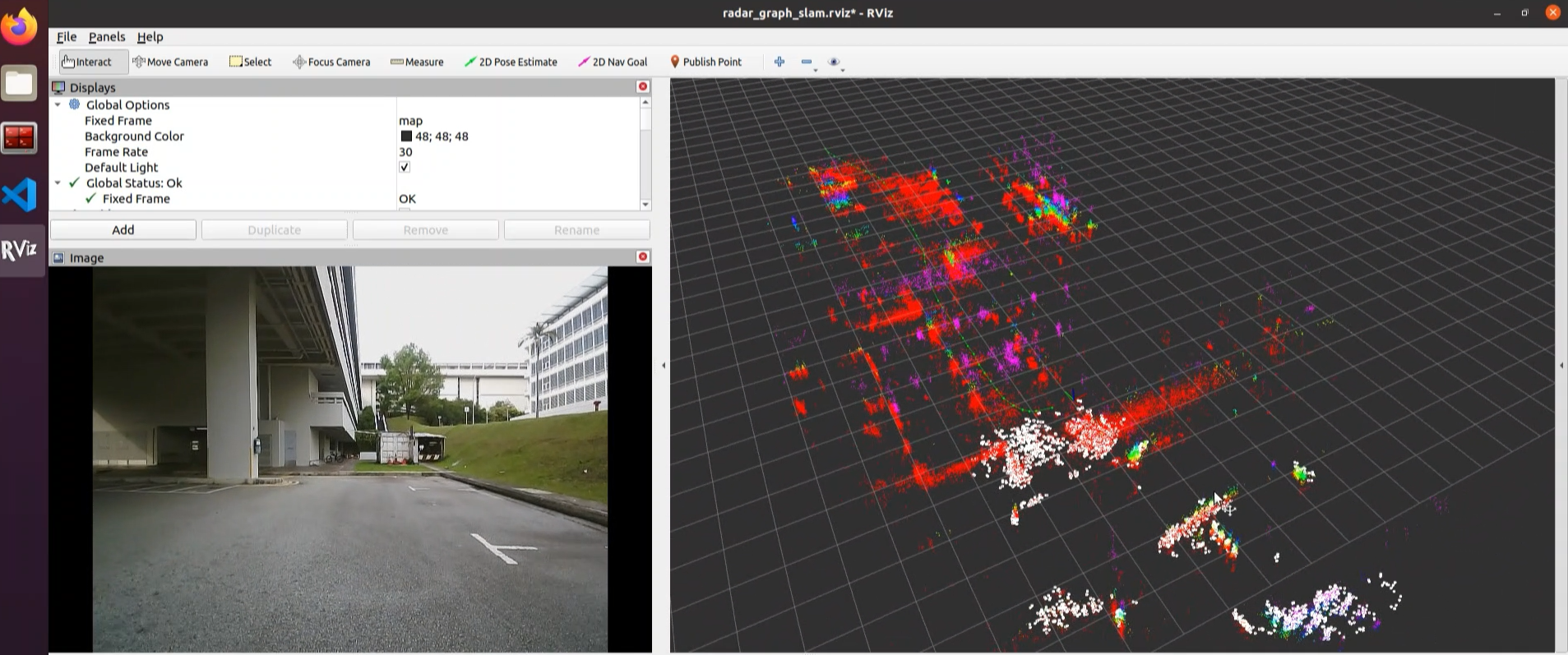
4.2 运行
ctrl+alt+T打开终端,执行如下指令启动slam程序:
rosnoetic@rosnoetic-VirtualBox:~$ cd 4dradar_slam_ws/
rosnoetic@rosnoetic-VirtualBox:~/4dradar_slam_ws$ source ./devel/setup.bash
rosnoetic@rosnoetic-VirtualBox:~/4dradar_slam_ws$ roslaunch radar_graph_slam radar_graph_slam.launch
-
radar_graph_slam.launch
<?xml version="1.0"?> <launch> <!-- Parameters --> <rosparam file="$(find radar_graph_slam)/config/params.yaml" command="load" /> <param name="use_sim_time" value="true"/> <!-- arguments --> <arg name="nodelet_manager" default="radarslam_nodelet_manager" /> <arg name="enable_floor_detection" default="false" /> <arg name="enable_barometer" default="false" /> <!-- barometer altitude constraint, not used --> <arg name="barometer_edge_type" default="1" /> <!-- not used --> <arg name="enable_gps" default="false" /> <arg name="enable_dynamic_object_removal" default="false" /> <arg name="enable_frontend_ego_vel" default="false" /> <arg name="enable_preintegration" default="false" /> <!-- not used --> <arg name="keyframe_delta_trans_front_end" default="0.5" /> <arg name="keyframe_delta_trans_back_end" default="2" /><!-- 1 2 --> <arg name="keyframe_delta_angle" default="0.2612" /><!-- 10°: 0.1745 15°: 0.2612 --> <arg name="enable_transform_thresholding" default="true" /> <arg name="enable_loop_closure" default="false" /> <!-- ICP NDT_OMP FAST_GICP FAST_APDGICP FAST_VGICP --> <arg name="registration_method" default="FAST_APDGICP" /> <arg name="reg_resolution" default="1.0" /> <arg name="dist_var" default="0.86" /> <arg name="azimuth_var" default="0.5" /> <arg name="elevation_var" default="1.0" /><!-- 1.0 --> <!-- optional arguments --> <arg name="enable_robot_odometry_init_guess" default="false" /> <!-- not used --> <!-- transformation between lidar and base_link --> <!-- <node pkg="tf" type="static_transform_publisher" name="lidar2base_publisher" args="0 0 0 0 0 0 base_link velodyne 10" /> --> <node pkg="nodelet" type="nodelet" name="$(arg nodelet_manager)" args="manager" output="screen"/> <!-- radar_preprocessing_nodelet --> <node pkg="nodelet" type="nodelet" name="radar_preprocessing_nodelet" args="load radar_graph_slam/PreprocessingNodelet $(arg nodelet_manager)"> <!-- distance filter --> <param name="use_distance_filter" value="true" /> <param name="distance_near_thresh" value="2" /> <param name="distance_far_thresh" value="100.0" /> <param name="z_low_thresh" value="-100.0" /> <param name="z_high_thresh" value="100.0" /> <!-- NONE, VOXELGRID(0.1), or APPROX_VOXELGRID --> <param name="downsample_method" value="VOXELGRID" /> <param name="downsample_resolution" value="0.1" /> <!-- NONE, RADIUS 2(initial 0.5 2), STATISTICAL, or BILATERAL --> <param name="outlier_removal_method" value="RADIUS" /> <param name="statistical_mean_k" value="30" /> <param name="statistical_stddev" value="1.2" /> <param name="radius_radius" value="0.5" /> <param name="radius_min_neighbors" value="1" /> <param name="bilateral_sigma_s" value="5" /> <param name="bilateral_sigma_r" value="0.03" /> <!-- Power Filterring --> <param name="power_threshold" value="0.0" /> <!-- Ego Velocity Estimation --> <param name="enable_dynamic_object_removal" value="$(arg enable_dynamic_object_removal)" /> <!-- ground truth publication --> <param name="gt_file_location" value="/home/zhuge/datasets/Radar/gt_carpark1.txt" /> </node> <!-- scan_matching_odometry_nodelet --> <node pkg="nodelet" type="nodelet" name="scan_matching_odometry_nodelet" args="load radar_graph_slam/ScanMatchingOdometryNodelet $(arg nodelet_manager)"> <param name="keyframe_delta_trans" value="$(arg keyframe_delta_trans_front_end)" /> <param name="keyframe_delta_angle" value="$(arg keyframe_delta_angle)" /> <param name="keyframe_min_size" value="100" /> <param name="enable_robot_odometry_init_guess" value="$(arg enable_robot_odometry_init_guess)" /> <param name="enable_transform_thresholding" value="$(arg enable_transform_thresholding)" /> <param name="enable_imu_thresholding" value="false" /> <!-- bad effect, not used --> <param name="max_acceptable_trans" value="1.0" /> <param name="max_acceptable_angle" value="3" /><!-- degree --> <param name="max_diff_trans" value="0.3" /> <param name="max_diff_angle" value="0.8" /> <param name="max_egovel_cum" value="1" /><!-- 12m/s --> <param name="downsample_method" value="NONE" /> <param name="downsample_resolution" value="0.1" /> <!-- ICP, GICP, NDT, GICP_OMP, NDT_OMP, FAST_GICP(recommended), or FAST_VGICP --> <param name="registration_method" value="$(arg registration_method)" /> <param name="dist_var" value="$(arg dist_var)" /><!-- --> <param name="azimuth_var" value="$(arg azimuth_var)" /><!-- --> <param name="elevation_var" value="$(arg elevation_var)" /><!-- --> <param name="reg_num_threads" value="0" /> <param name="reg_transformation_epsilon" value="0.1"/> <param name="reg_maximum_iterations" value="64"/> <param name="reg_max_correspondence_distance" value="2.0"/> <param name="reg_max_optimizer_iterations" value="20"/> <param name="reg_use_reciprocal_correspondences" value="false"/> <param name="reg_correspondence_randomness" value="20"/> <param name="reg_resolution" value="$(arg reg_resolution)" /> <param name="reg_nn_search_method" value="DIRECT7" /> <param name="use_ego_vel" value="$(arg enable_frontend_ego_vel)"/> <param name="max_submap_frames" value="5"/> <param name="enable_scan_to_map" value="false"/> <!-- IMU --> <!-- bad effect, not used --> <param name="enable_imu_fusion" value="false" /> <param name="imu_debug_out" value="true" /> <param name="imu_fusion_ratio" value="0.1" /> </node> <!-- radar_graph_slam_nodelet --> <node pkg="nodelet" type="nodelet" name="radar_graph_slam_nodelet" args="load radar_graph_slam/RadarGraphSlamNodelet $(arg nodelet_manager)" output="screen"> <!-- optimization params --> <!-- typical solvers: gn_var, gn_fix6_3, gn_var_cholmod, lm_var, lm_fix6_3, lm_var_cholmod, ... --> <param name="g2o_solver_type" value="lm_var_cholmod" /> <param name="g2o_solver_num_iterations" value="512" /> <!-- constraint switches --> <param name="enable_barometer" value="$(arg enable_barometer)" /> <!-- not used --> <param name="enable_gps" value="$(arg enable_gps)" /> <!-- keyframe registration params --> <param name="max_keyframes_per_update" value="30" /> <param name="keyframe_delta_trans" value="$(arg keyframe_delta_trans_back_end)" /> <param name="keyframe_delta_angle" value="$(arg keyframe_delta_angle)" /> <param name="keyframe_min_size" value="500" /> <!-- fix first node for optimization stability --> <param name="fix_first_node" value="true"/> <param name="fix_first_node_stddev" value="10 10 10 1 1 1"/> <param name="fix_first_node_adaptive" value="true"/> <!-- Scan Context Loop Closure params 15 25 15 2.5 --> <param name="enable_loop_closure" value="$(arg enable_loop_closure)"/> <param name="enable_pf" value="true"/> <!-- loop prefiltering --> <param name="enable_odom_check" value="true"/> <param name="distance_thresh" value="10.0" /> <param name="accum_distance_thresh" value="50.0" /><!-- Minimum distance beteen two edges of the loop --> <param name="min_loop_interval_dist" value="10.0" /><!-- Minimum distance between a new loop edge and the last one --> <param name="distance_from_last_edge_thresh" value="10" /> <param name="max_baro_difference" value="2.0" /><!-- Maximum altitude difference beteen two edges' odometry --> <param name="max_yaw_difference" value="20" /><!-- Maximum yaw difference beteen two edges' odometry --> <param name="sc_dist_thresh" value="0.5" /><!-- Matching score threshold of Scan Context 0.4-0.6 will be good --> <param name="sc_azimuth_range" value="56.5" /> <param name="historyKeyframeFitnessScore" value="6" /> <param name="odom_check_trans_thresh" value="0.3" /> <param name="odom_check_rot_thresh" value="0.05" /> <param name="pairwise_check_trans_thresh" value="1.5" /> <param name="pairwise_check_rot_thresh" value="0.2" /> <!-- scan matching params --> <param name="registration_method" value="$(arg registration_method)" /> <param name="reg_num_threads" value="0" /> <param name="reg_transformation_epsilon" value="0.1"/> <param name="reg_maximum_iterations" value="64"/> <param name="reg_max_correspondence_distance" value="2.0"/> <param name="reg_max_optimizer_iterations" value="20"/> <param name="reg_use_reciprocal_correspondences" value="false"/> <param name="reg_correspondence_randomness" value="20"/> <param name="reg_resolution" value="$(arg reg_resolution)" /> <param name="reg_nn_search_method" value="DIRECT7" /> <!-- edge params --> <!-- Barometer not used --> <param name="barometer_edge_type" value="$(arg barometer_edge_type)" /> <param name="barometer_edge_robust_kernel" value="Huber" /> <param name="barometer_edge_robust_kernel_size" value="1.0" /> <param name="barometer_edge_stddev" value="0.47" /> <!-- 0.47 --> <!-- GPS --> <param name="gps_edge_robust_kernel" value="Huber" /> <param name="gps_edge_robust_kernel_size" value="1.0" /> <param name="gps_edge_stddev_xy" value="5.0" /> <param name="gps_edge_stddev_z" value="5.0" /> <param name="max_gps_edge_stddev_xy" value="1.5" /> <param name="max_gps_edge_stddev_z" value="3.0" /> <param name="gps_edge_intervals" value="15" /> <param name="dataset_name" value="loop2" /> <!-- Preintegration --> <!-- bad effect, not used --> <param name="enable_preintegration" value="$(arg enable_preintegration)" /> <param name="use_egovel_preinteg_trans" value="false" /><!-- Ego Velocity Integration - Translation --> <param name="preinteg_orient_stddev" value="1" /> <param name="preinteg_trans_stddev" value="5" /> <!-- scan matching --> <!-- robust kernels: NONE, Cauchy, DCS, Fair, GemanMcClure, Huber, PseudoHuber, Saturated, Tukey, Welsch --> <param name="odometry_edge_robust_kernel" value="NONE" /> <param name="odometry_edge_robust_kernel_size" value="1.0" /> <param name="loop_closure_edge_robust_kernel" value="Huber" /> <param name="loop_closure_edge_robust_kernel_size" value="1.0" /> <param name="use_const_inf_matrix" value="false" /> <param name="const_stddev_x" value="0.5" /> <param name="const_stddev_q" value="0.1" /> <param name="var_gain_a" value="20.0" /> <param name="min_stddev_x" value="0.1" /> <param name="max_stddev_x" value="5.0" /> <param name="min_stddev_q" value="0.05" /> <param name="max_stddev_q" value="0.2" /> <!-- update params --> <param name="graph_update_interval" value="2.0" /> <param name="map_cloud_update_interval" value="6.0" /> <param name="map_cloud_resolution" value="0.05" /> <!-- marker params --> <param name="show_sphere" value="false" /> </node> <node pkg="rviz" type="rviz" name="rviz_slam" args="-d $(find radar_graph_slam)/rviz/radar_graph_slam.rviz" respawn="true"/> <!--- Rosbag Play --> <include file="$(find radar_graph_slam)/launch/rosbag_play_radar_carpark1.launch" /> <!-- <include file="$(find radar_graph_slam)/launch/rosbag_play_radar_carpark3.launch" /> --> <!-- <include file="$(find radar_graph_slam)/launch/rosbag_play_radar_garden.launch" /> --> <!-- <include file="$(find radar_graph_slam)/launch/rosbag_play_radar_nanyanglink.launch" /> --> <!-- <include file="$(find radar_graph_slam)/launch/rosbag_play_radar_ntuloop1.launch" /> --> <!-- <include file="$(find radar_graph_slam)/launch/rosbag_play_radar_ntuloop2.launch" /> --> <!-- <include file="$(find radar_graph_slam)/launch/rosbag_play_radar_ntuloop3.launch" /> --> <!-- <include file="$(find radar_graph_slam)/launch/rosbag_play_radar_smoke.launch" /> --> </launch>

















 991
991

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









