







第1 章 模拟机器人
本章介绍由分立晶体管和数字逻辑电路 组成的模拟原生动物趋性行为的简易反射式 机器人的制作方法,内容包括双轮移动式底 盘的制作、光线传感器的选择、自律式机器 人的控制原理、在芯片上迅速搭建电路的技 巧,以及施密特触发器的特性。
1.1 高熵系统与寻光机器人
随着智能手机、 MID等移动互联设备的普及,云计算与我们的距离也越来越 近,而隐藏在云计算背后的则是一个异常庞大的承载着海量实时变化信息的高熵 系统。高熵系统的海量信息一方面给云计算带来了无尽潜力,另一方面又要求我 们对这些信息进行相对有序的管理。如何更好地理解高熵系统所带来的巨大优 势?我将试着用一部嵌入了高熵系统的小型桌面式机器人给你带来一些启示。
1.1.1 寻光机器人机械部分的制作
首先你要用人工材料制作这样一部机器人:它可以自由活动,可以感受到光,可以对光做出反应,即制作一部具有寻光功能的小型桌面式机器人。你会发现它非常简单,但是麻雀虽小,五脏俱全,它包含了机器人所必需的3大部件:传感器、控制器和执行器。
寻光机器人是最具代表性的仿生机器人。机器人的寻光特性用生物学术语描述就是“趋光性”。大多数生物,包括动物和植物都具有趋光性,还有一些生物对光具有反向趋性(负趋光性或趋暗性),比如生活在土壤中的无脊椎动物。
生物的趋光性可以追溯到一种从史前就存在的生物——海星。海星每只腕足(运动器官)的末端都有一个红色的眼点(感光器官)。这两种器官都可以用人工材料和现代技术来模拟,并且可以在业余爱好者的工作台上实现。
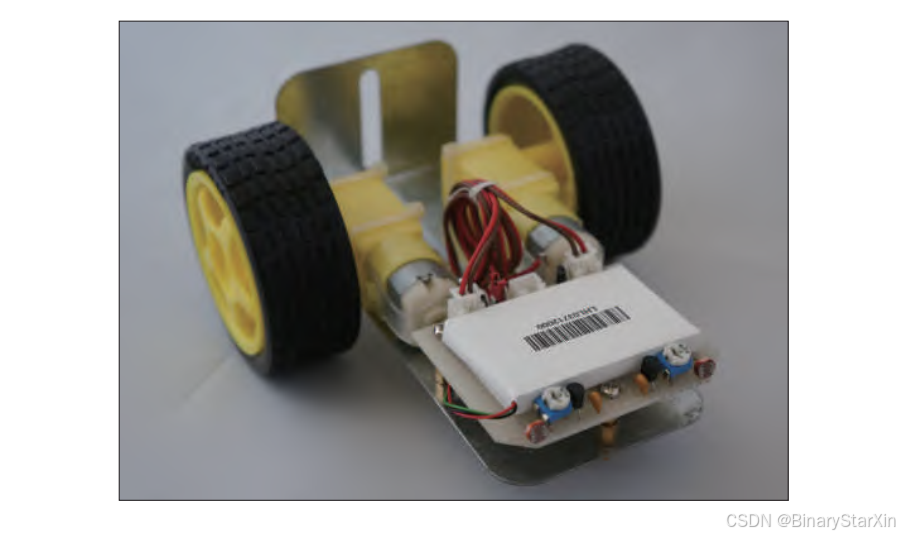
下面开始制作机器人的身体。身体是一个由两个电机驱动的可以自由活动的小车式底盘。身体相当于机器人的骨架,机器人的传感器和控制器都搭载在它上面。车轮和电机构成了机器人的运动器官。
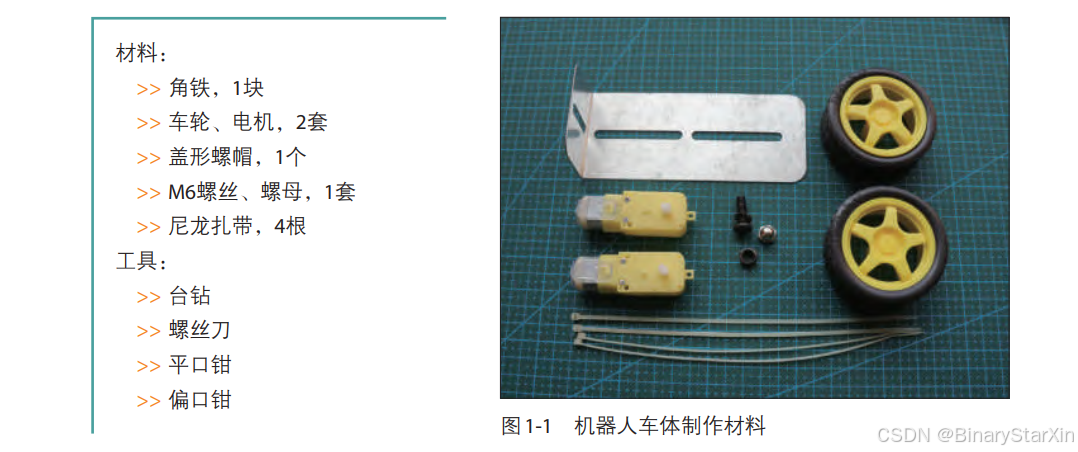
机器人车体制作材料如图1-1所示。对大多数爱好者来说,因为缺少合适的材料和工具,机器人骨架部分的制作一直是一个比较困难的环节。在制作这部机器人时,我也面临同样的情况。因为最近工作室搬家,平时用着顺手的材料都打包封存了,只能使用手边临时搜罗到的一些材料。
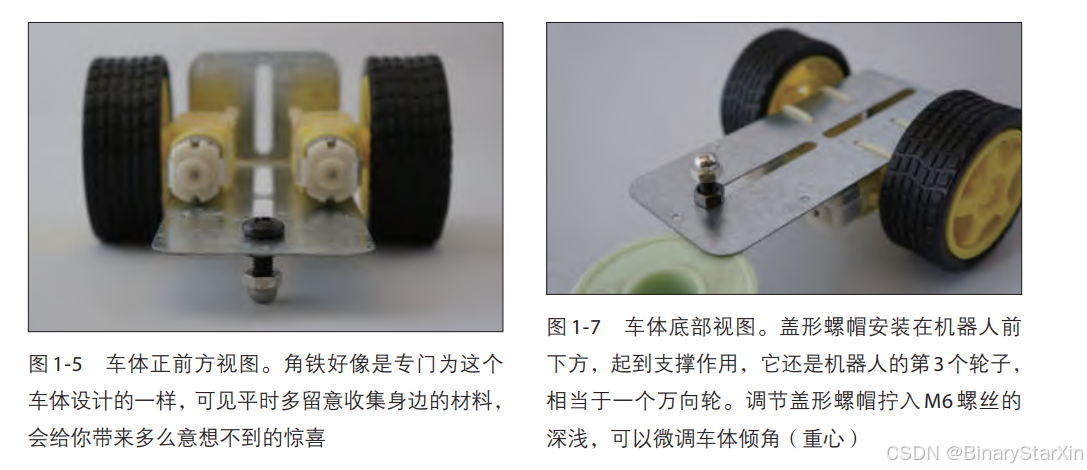
电机和车轮是市场上常见的型号,在网上任何一家机器人零件店里都可以找到,几乎是国内机器人模型的标配动力部件。角铁是装修时留下的,不知道最初用在哪里,可能是用来吊装抽油烟机的标准件。盖形螺帽是自行车上的配件。 M6螺丝、螺母是从散料堆里挑出来的,正好可以穿过角铁上的槽口,在末端固定盖形螺帽。
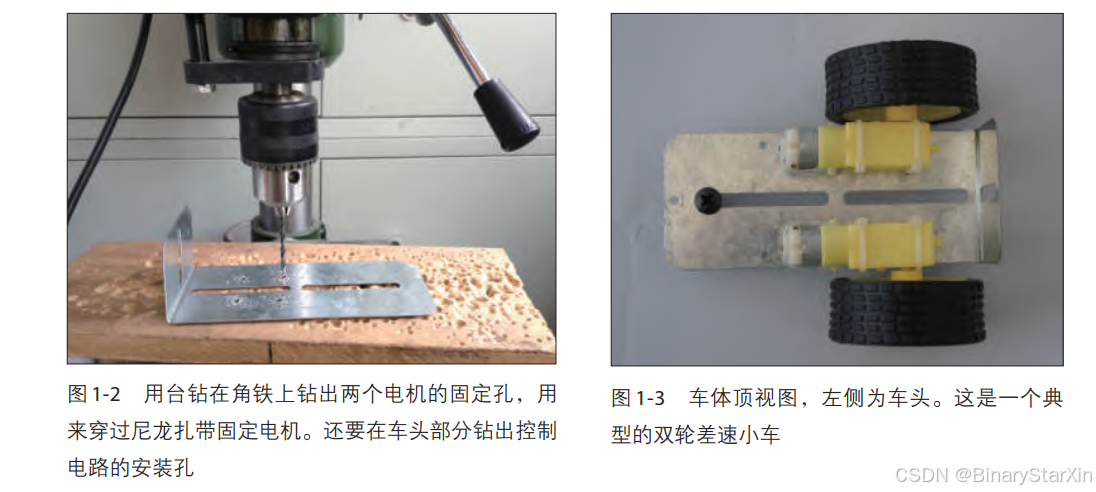
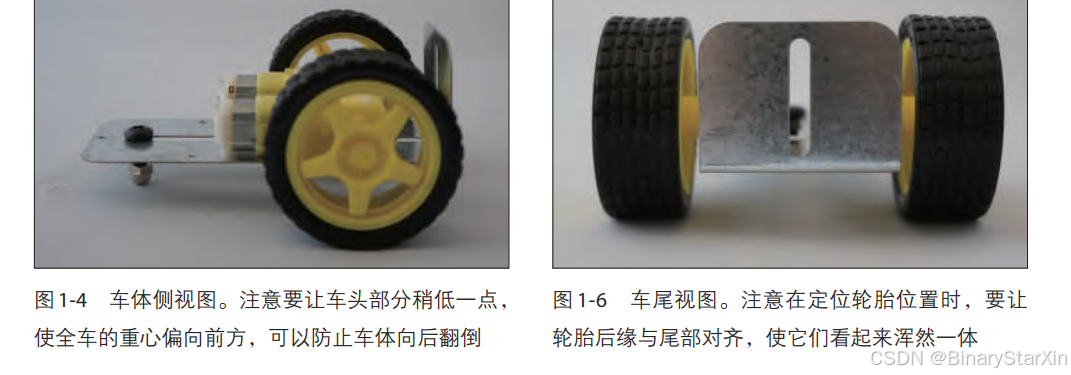
车体的装配方法如图1-2~图1-7所示。读者也可以发挥创造力,设计结构更精巧的车体。
1.1.2 寻光机器人电子部分的制作
接着制作机器人的电子部分,用到的材料如图1-8所示。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1047
1047

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











