






solidworks导出urdf,并使用rviz显示
以节卡jaka zu机器人为例,节卡官网下载三维模型,
官网-服务与支持-模型及图纸:
如果直接下载3D-URDF,导入ros中,启动时会显示缺少mesh文件的故障,所以选择solidworks打开3D模型,由solidworks生成urdf文件,这样就有mesh文件。
刚开始本文选择下载的上图中的3D-STEP文件,模型不能拖拽,零件全部固定,参考别的博客也不能拖动。还看了一些博客底下得评论,让我下载了别的版本的sw,害。
不可拖拽生成的模型如下:仅供看着玩
defeat!随后下载的3D-可拖拽模型,呕吼,可以浮动哎!
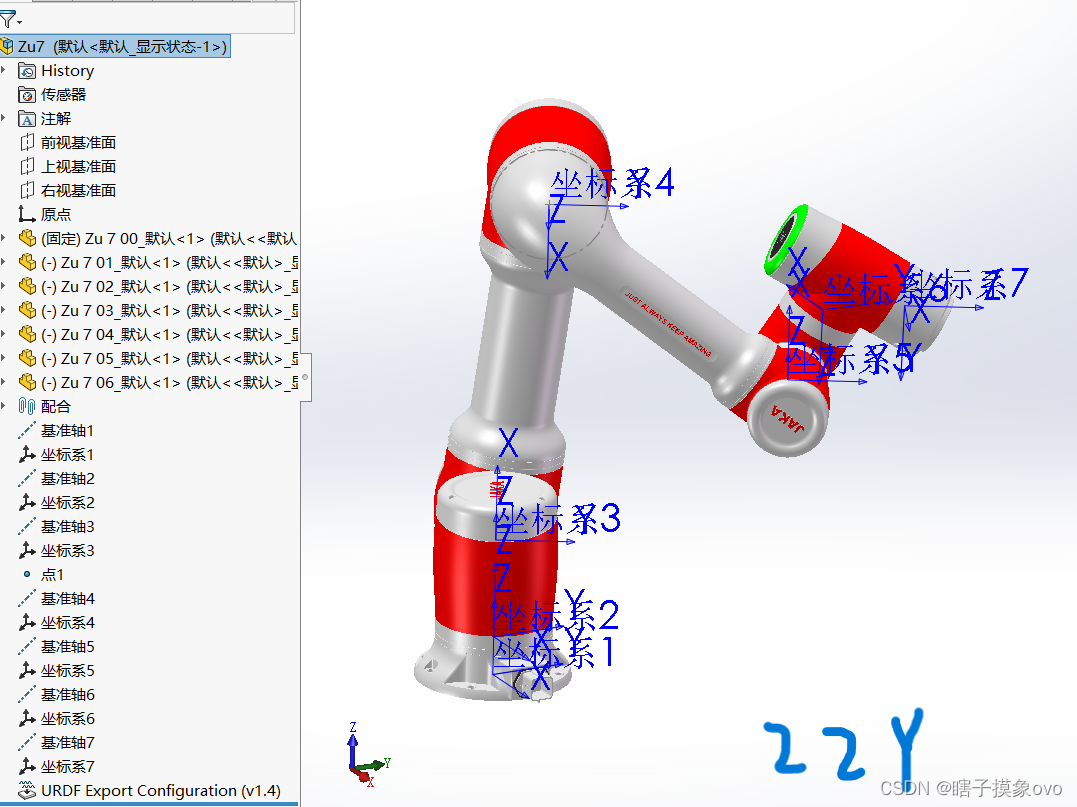
在导出urdf文件前需要挨个对机器人建立坐标系,原点,基准轴。
点的话,这个基本上就是设计树下,点击单个零件,看零件的原点,
基准轴用点面,一个点+基准轴垂直面;
坐标系也同理,就是要保持坐标系z轴与基准轴同轴。
如此如此,那么那么,就建立好啦!如下图所示:(嘎嘎好看)
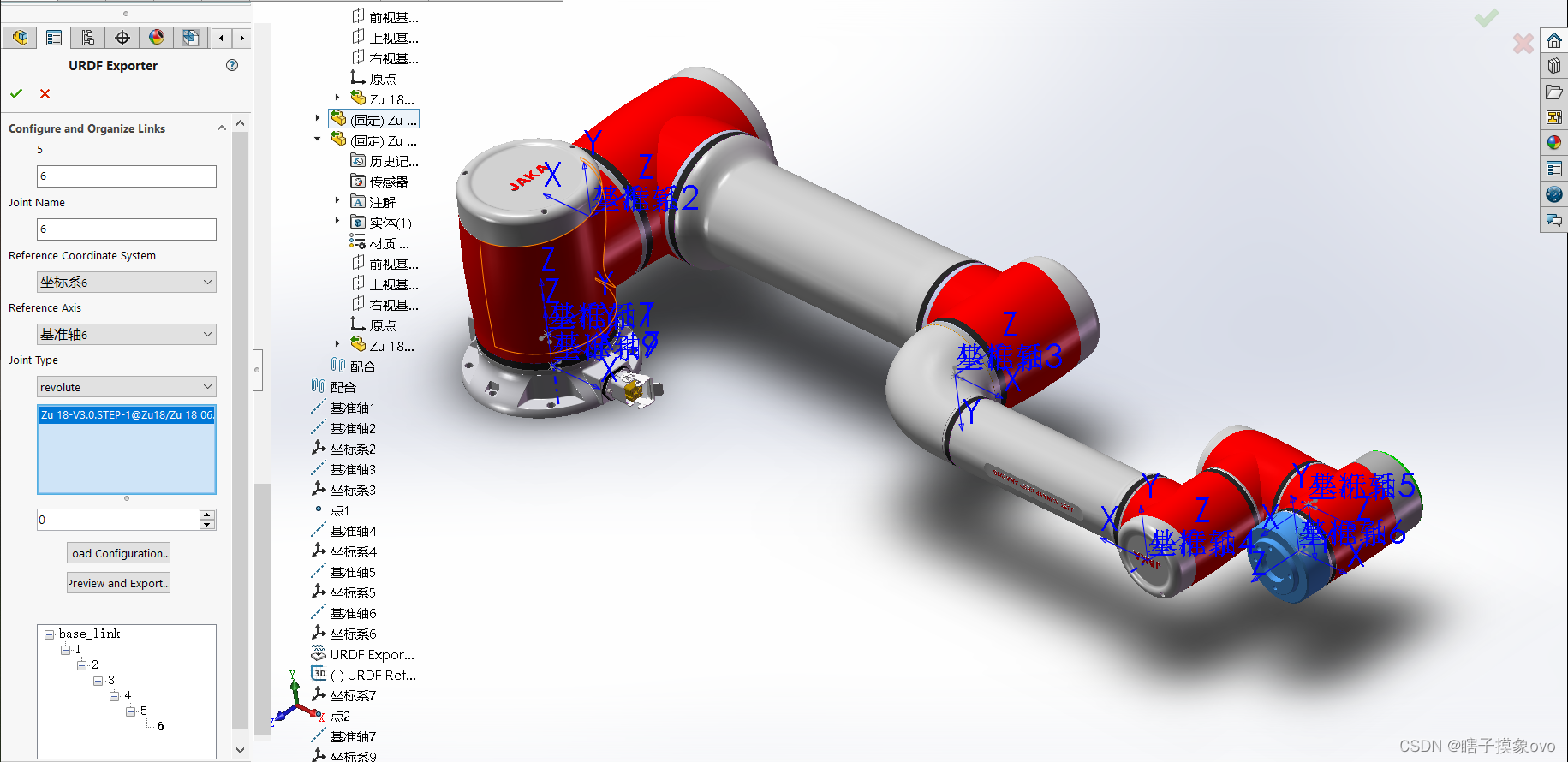
然后,就可以导出urdf文件了,工具-tool-Experts as urdf;
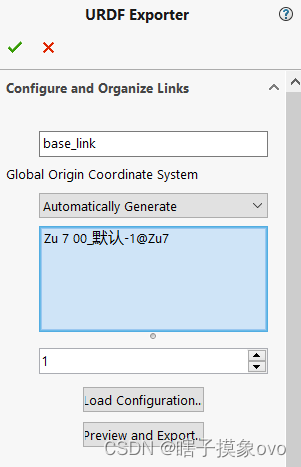
然后就大胆地走,大不了再来一次!选择之前建立得坐标系呀,基准轴呀。
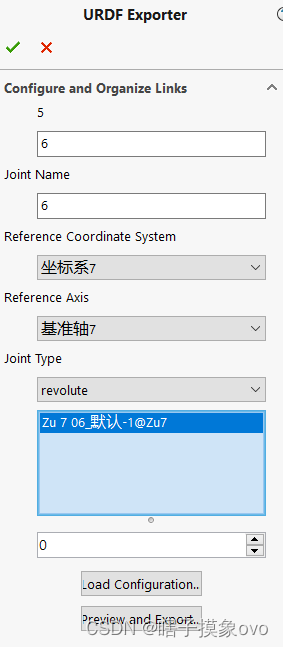
全部弄好以后,preview and export,gogogo!
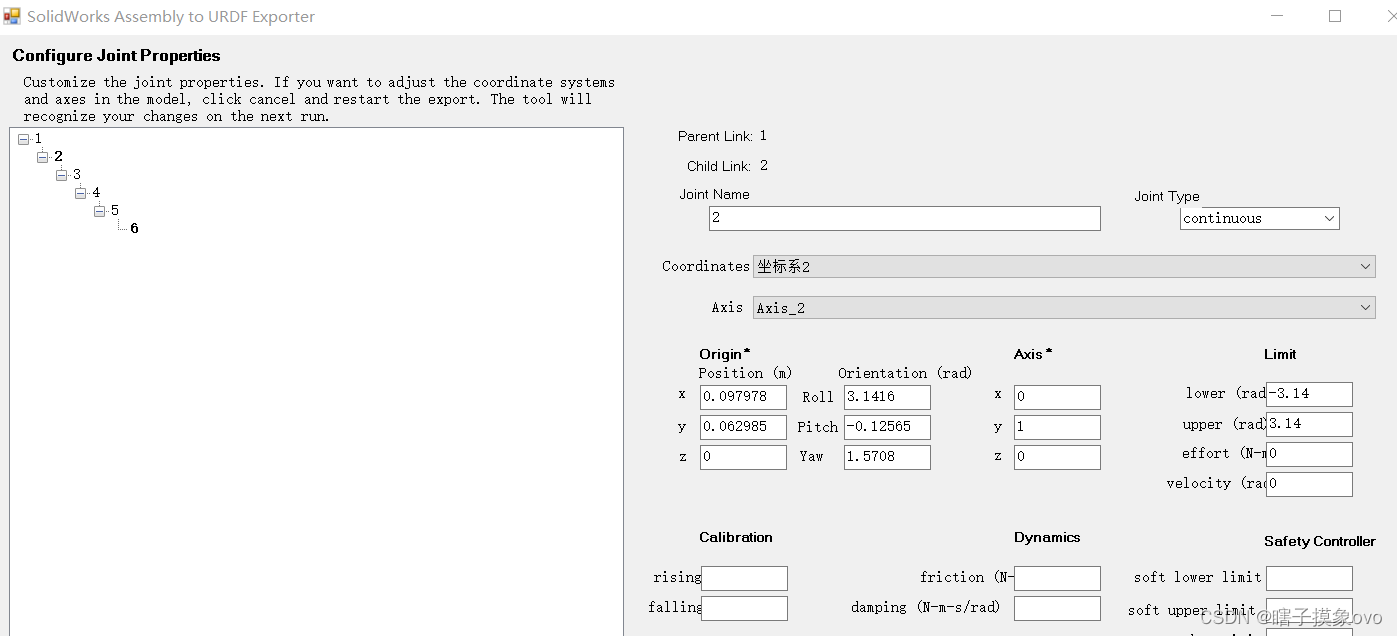
joint and link一般也没啥注意的,因为我这6R机械臂,给他个-360到360度限位,gogogo!
next-export URDF and Meshes…
导出名称英文小写开头,别的就没啥。类似如下:

文件夹里啥都有!复制在你的ros里,编译
catkin_make
catkin_make_install
然后的然后,就去启动吧!
roscore
roslaunch urdf_tutorial display.launch model:=(你的urdf名称).urdf

ok!
















 1335
1335











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











