







可视图法路径规划(VG)
可视图法由Lozano-Perez和Wesley于1979年在论文:《An Algorithm for Planning Collision-Free Paths among Polyhedral Obstacles.》中提出。
基于可视图法路径规划算法主要包括以下两个步骤:①可视图的构建、②采用某种优化方法在构建的可视图上搜索最优路径
在可视图算法中,障碍物用多边形描述,并将起始点S 、目标点G 和多边形障碍物的各顶点Vo,作为可视图的顶点V,将这些顶点之间相互连接,并保留不穿越障碍物的连线,作为可视图的边E,然后按照某种准则给这些边赋权值,比如以这些边的长度来作为其权值 。然后采用某种优化方法在构建的可视图上搜索所需的最优路径 ,根据以上过程易知,最终得到是包括S和G的一些顶点的集合,这些顶点按顺序相连接即为所得路径。

由上述过程可知,构建可视图的关键在于确定任意两个顶点间的连线是否穿过障碍物障碍物。可以简单粗暴的直接检测任意两个顶点之间连线是否穿越了障碍物,也可采用以下方法简化判断:
① 同一障碍物的相邻顶点间的连线肯定不穿过障碍物(即该障碍物的某条边界),同一障碍物的的不相邻顶点间一般认为是穿越障碍物的(但是对于凹多边形障碍物而言,这样做有时会产生误判,因为凹多边形的某些不相邻节点之间连线也是不穿越障碍物的)
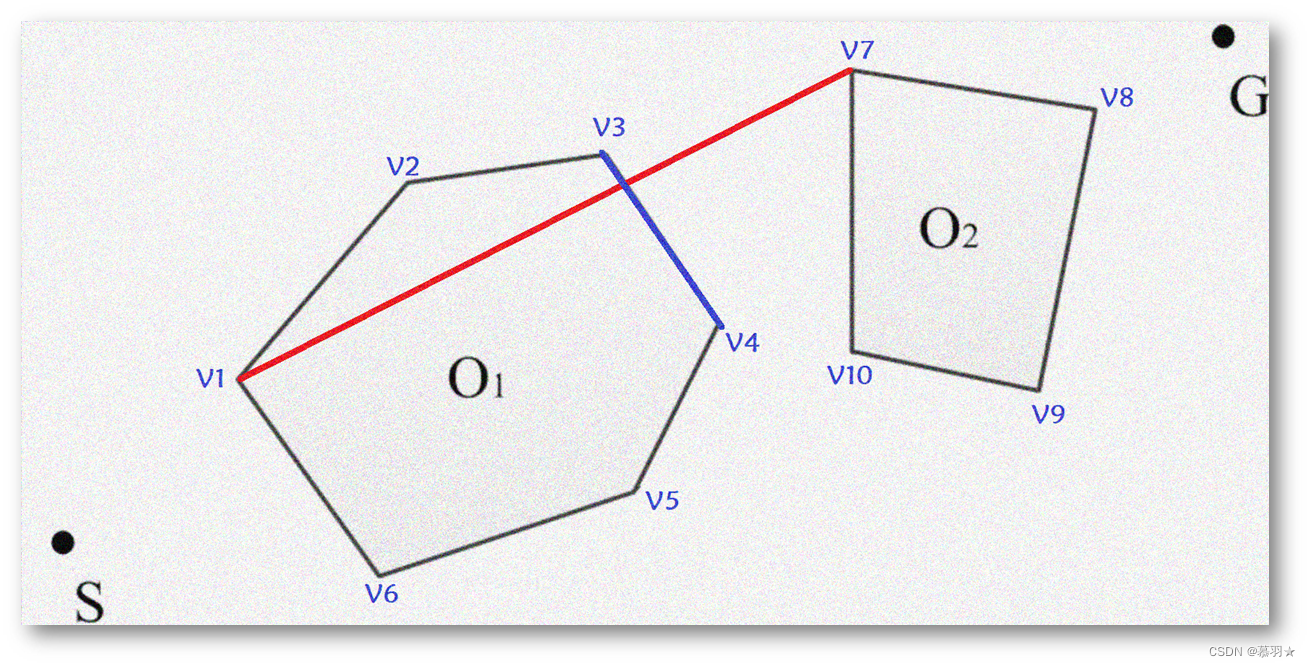
② 不同障碍物之间顶点是否穿过的障碍物的判断可以转化为判断其顶点连线是否会与构成障碍物的边的两个顶点之间连线相交,如下图中V1和V7之间的连线穿过了V3和V4的连线,因此V1和V7之间连线是穿越障碍物的。
可视图法找到的路径是贴着障碍物边缘的,对此作者在论文中提到可以采用将障碍物的顶点按照设定的半径往外扩展一段距离的方法,效果如下所示:

拓展障碍物半径可能丢失最短路径,如下图所示:

如果拓展半径取较大值,我们设定扩展后的障碍物边缘与另一个扩展后的障碍物边缘的相交区域是可行的,则在相交区域的内部可以找到可行的代替路径,如下图蓝色路线所示:

此外,也可以通过寻找障碍物的重心绘制圆形拓展区域或者采用障碍物的外接圆等方法进行拓展,不同的场景下,不同的拓展障碍物的方式往往能收获不同的效果。对于弧形的障碍物,难以寻找顶点,可已将圆弧边界用切线包围,转化为多边形障碍物,或者将弧形障碍物外拓为多边形障碍物,可视图法的灵活度较差,一旦环境发生改变,新增了障碍物,就要重新进行可视图的构建,不适合于实时性较高的动态场景。 切线图法和Voronoi图法对可视图法进行了改进。切线图法用障碍物的切线表示弧,Voronoi图法可以确保找到的路径尽最大可能的远离障碍物。


















 2189
2189

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











