






你有听说过这些话吗?“系统设计的相位裕度太低了,容易振荡”,“相位裕度太低了,参数摄动时,系统容易不稳定”。有没有想过,你设计的负反馈系统,在一定情况下其实已经可以等效为正反馈了。
Motivation:
(1)从正反馈和负反馈最基本的概念出发,理解增益裕度和相位裕度。
(2)解释为什么设计系统时,要保证足够的稳定裕度。
1、基础概念
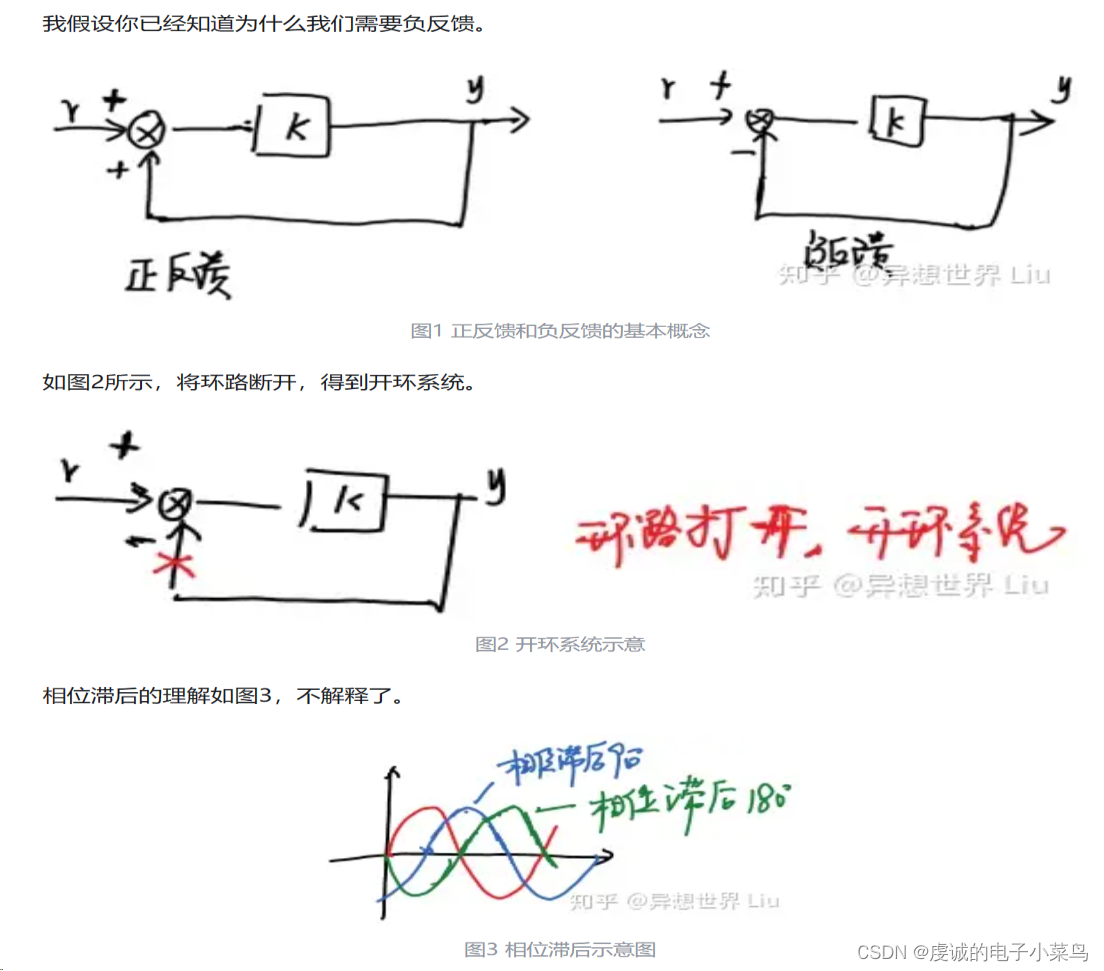
2、开环系统中相位滞后对系统影响
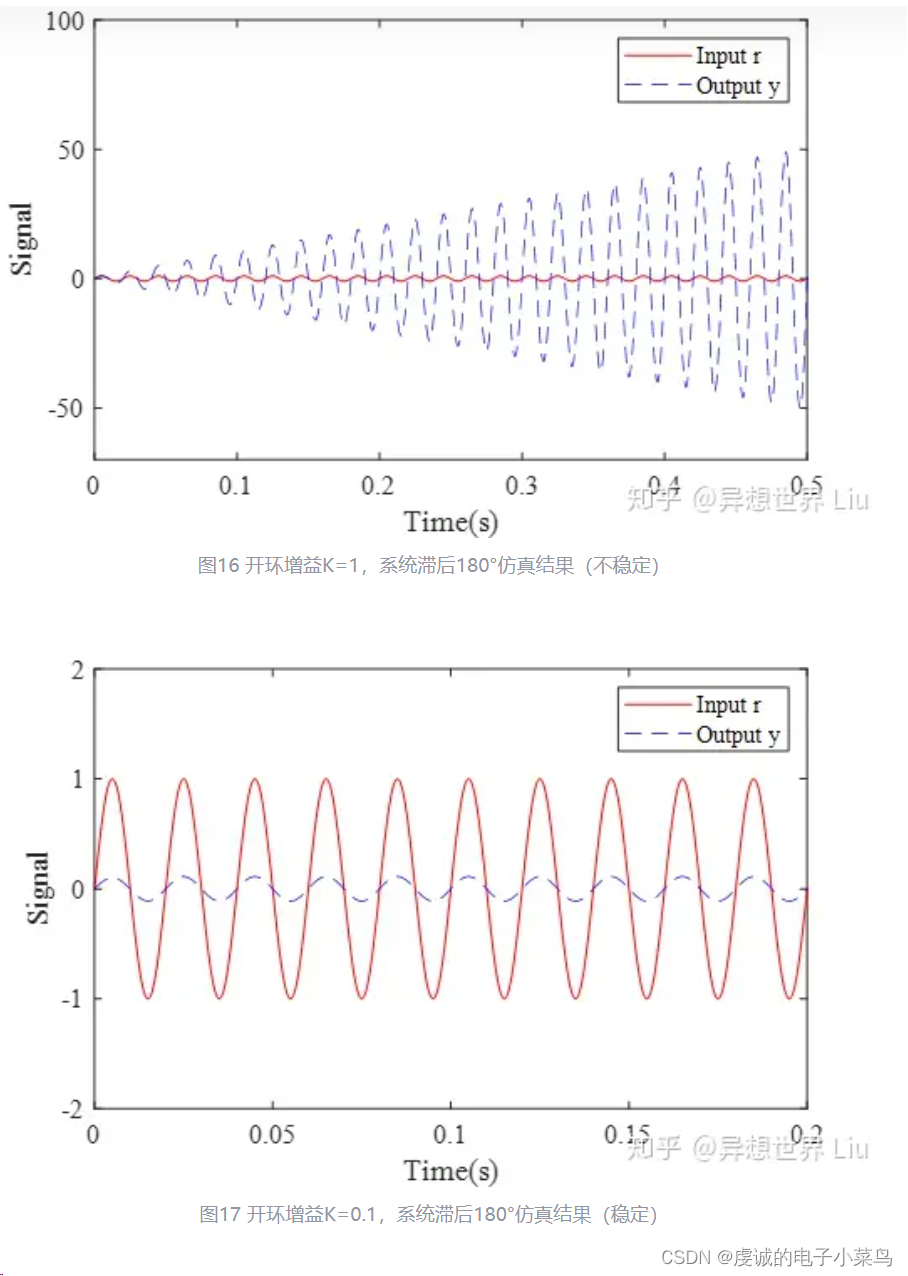
系统开环增益K=1,存在相位滞后的系统框图如图4。当系统中的延迟达到180°时,反馈信号就是给定信号反相。此时,若进行负反馈,则可以等效为将反馈信号反相的正反馈,如图5所示。等效后的系统不正是图1中K=1的正反馈系统吗?后果很可怕啦。
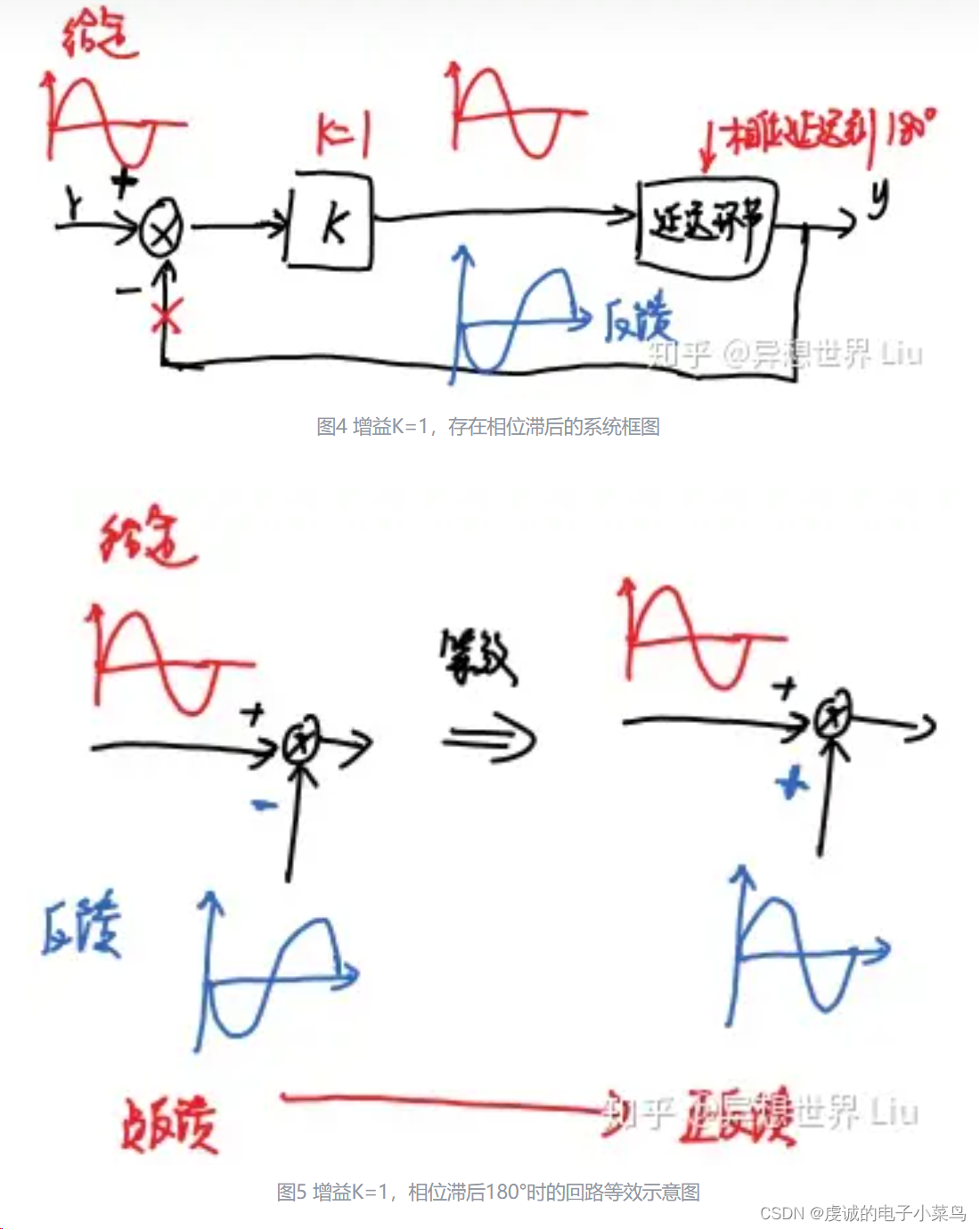
结论:对于开环增益K=1的系统,相位滞后180°时,系统从期望的负反馈变成正反馈,系统不稳定。
对环路开环增益K取对数, 20lgK=20lg1=0dB。
那么,随之而来的一个问题就是,相位滞后180°的系统一定会发散吗?
3、开环系统中增益对滞后系统的影响
开环系统,相位滞后180°,如图6所示。如果系统开环增益K很小,尽管此时仍等效为正反馈,但是正反馈的作用会弱一些。如图7所示。
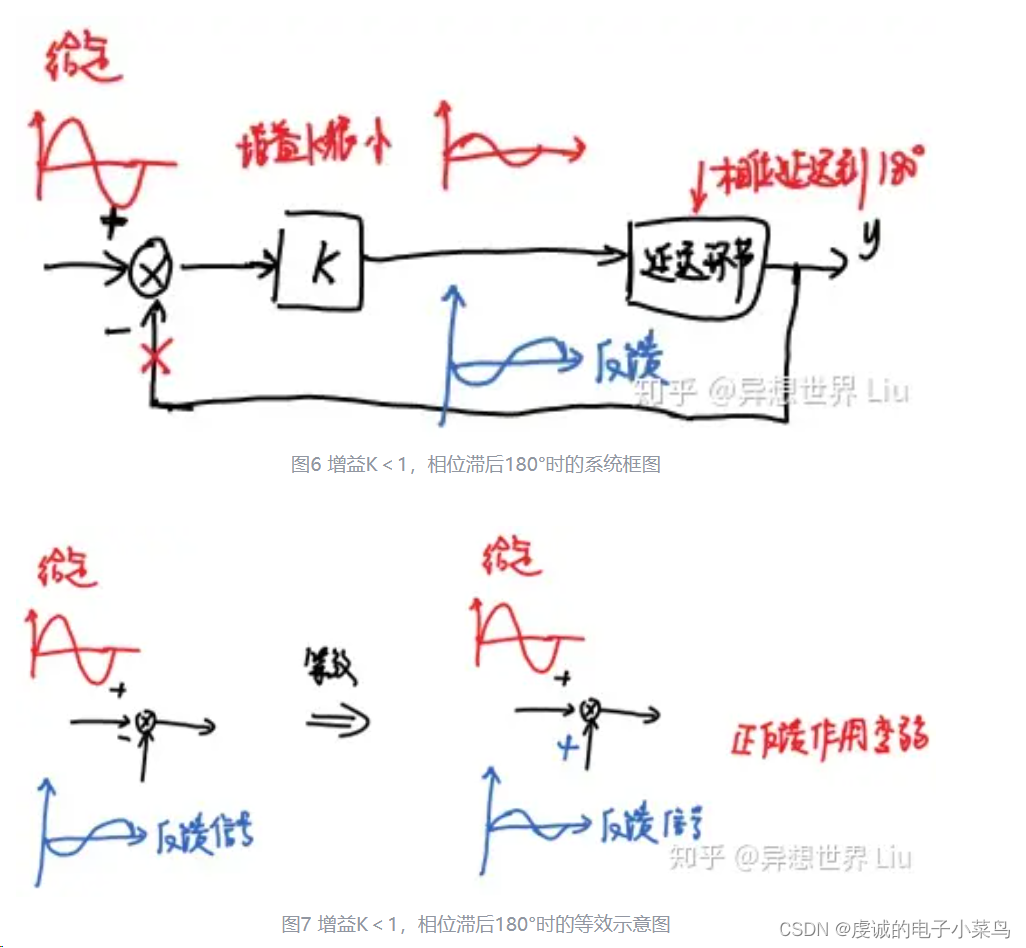
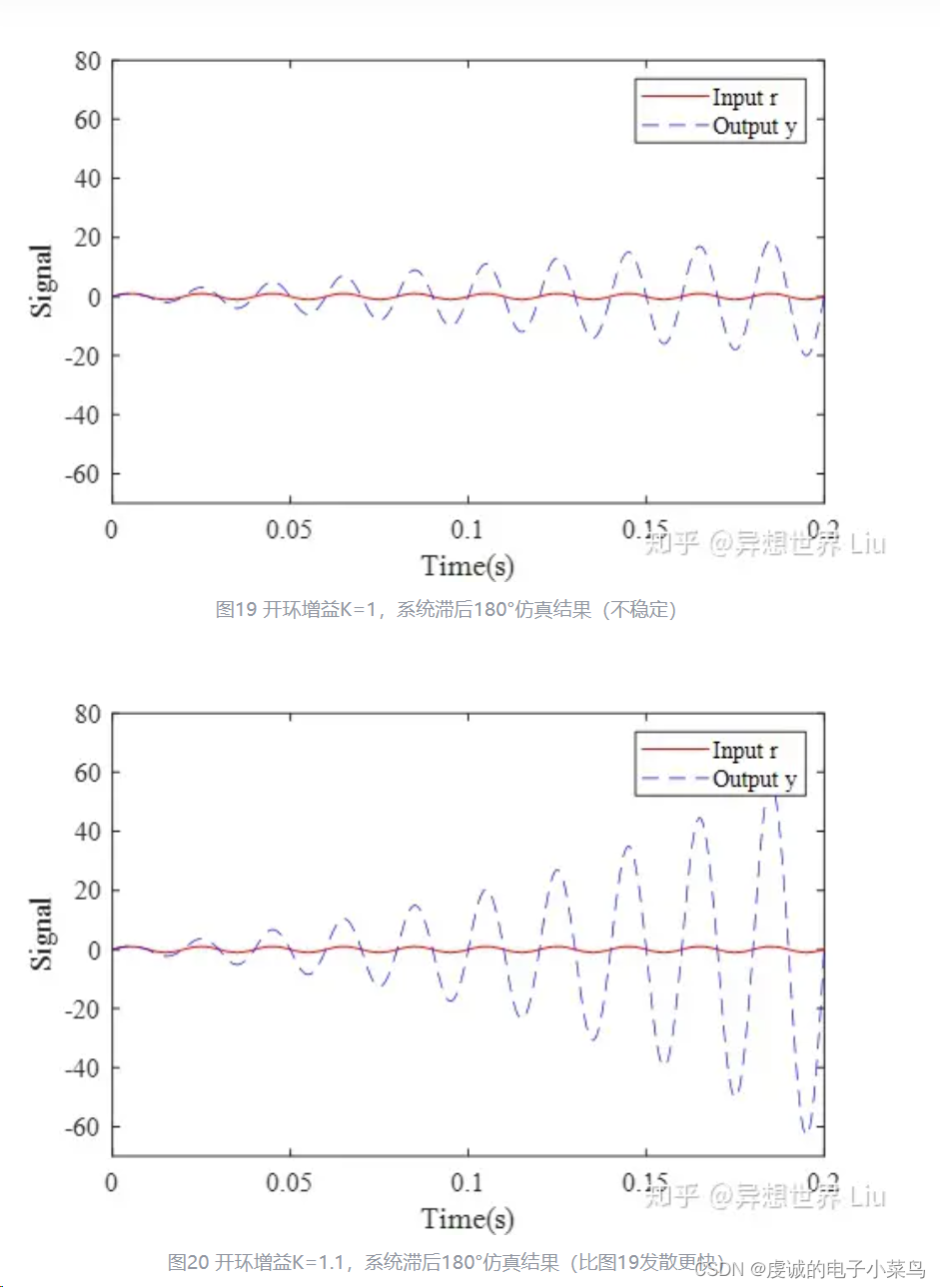
但如果系统中的增益很大呢,经过K后信号放大了,再反相,如果闭环的话,是不是相当于正反馈作用很强呢?
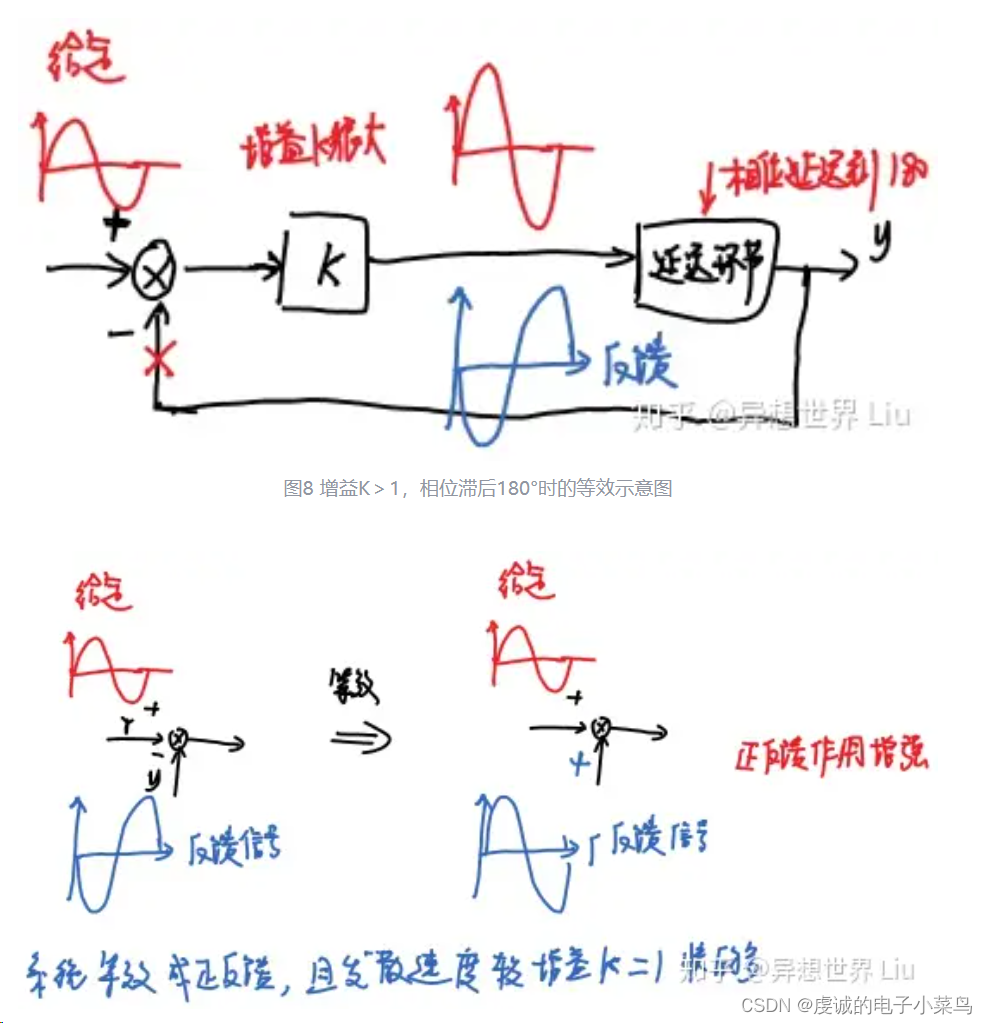
结论:相位滞后180°时,即相位-180°,系统未必是发散的。此时,开环增益K对系统的稳定性和性能有较大影响。
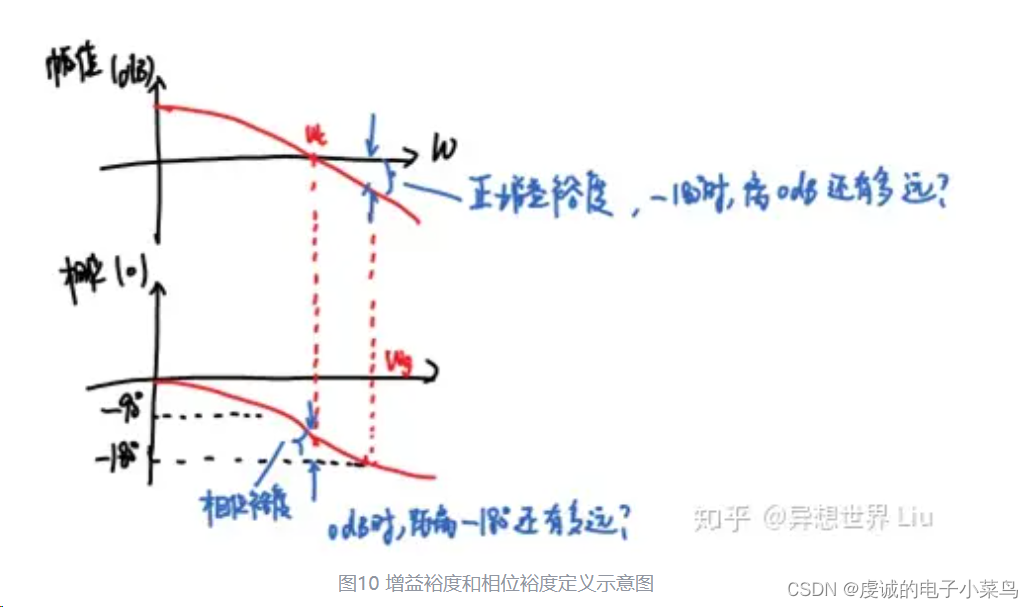
4、增益裕度和相位裕度
相位裕度定义:开环增益为0 dB,PM=180°+φ(ωc)-(-180°),对应频率为ωc。
增益裕度(幅值裕度)定义:相位为-180°时,增益裕度即为开环幅频特性的倒数Kg= 。对数增益裕度GM=20lgKg。
。对数增益裕度GM=20lgKg。
上面两个数值-180°和0 dB眼熟吗?没错啦,这不就是2和3节中分析时的条件吗?
相位裕度表明此时系统中的滞后有多大,这个负反馈是不是快要变成正反馈啦?在频率 ωc处,相位再滞后PM,系统将达到临界稳定状态。
增益裕度呢?是不是也能体现系统的稳定性呢?增益裕度 Kg 为一个系数,若开环系统的增益增加该系数倍,则闭环系统达到稳定的临界状态。
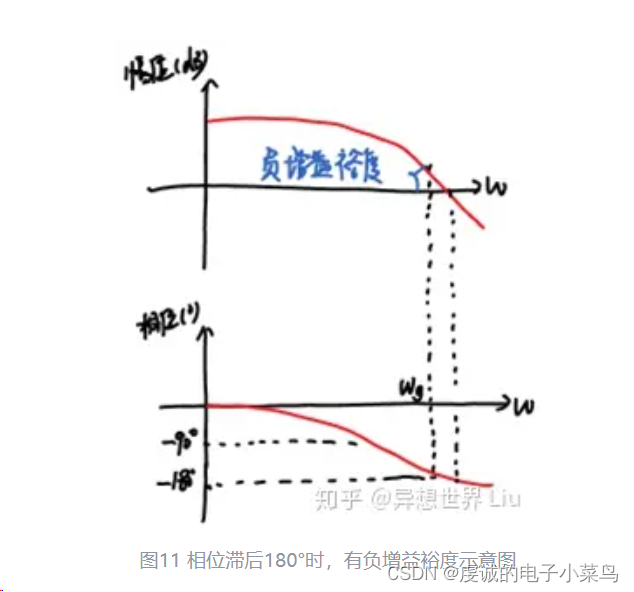
对于一个稳定的非最小相位系统,其相位裕度应为正,增益裕度 Kg 应大于1。当然,实际设计时,要保持足够的相位裕度和增益裕度。
图11表明开环系统相位滞后180°时,系统有正的幅值(开环增益K>1了),系统稳定吗?看看图8和图9。
为了描述闭环控制系统的相对稳定性,引入增益裕量和相位裕量。
相对稳定性自然是指与不稳定的距离有多少。那么,首先有稳定与不稳定之间的临界状态,也就是临界稳定。临界稳定时,闭环系统有虚轴上的极点(该点的频率响应增益趋于无穷),对应开环传递函数在该频率处取值为-1,也就是相位-180°,增益为1。因此,描述闭环稳定时的相对稳定性就有两种方法。
1.开环传递函数相位取-180°时,增益比1小多少
2.开环传递函数增益取1时,相位离-180°差多少
增益裕量Kg(gain margin)
定义:频率响应(开环传递函数中令s=jw)的相位达到-180°时(相位交界频率处),增益的倒数为增益裕量
注:使用增益的倒数的原因是:将此时的增益与1比较,用1/增益,得到一个倍数来描述增益裕量,正好就是倒数。
对数增益裕量:Kg’=20log Kg
Nyquist图中:闭环稳定时,曲线与实轴的交点横坐标的倒数
Bode图中:从相频Bode图中得到相位交界频率(也就是相位达到-180°的频率),对应到幅频Bode图中,若此时的增益低于0dB,则闭环稳定,与0dB的距离即为增益裕量。
相位裕量ΦPM(P.M. phase margin)
定义:频率响应的增益达到1时(增益交界频率),相位与-180°的差值
Nyquist图中:闭环稳定时,作单位圆,与ω为正的曲线相交于一点,该点的相位与-180°的差为相位裕量
Bode图中:从幅频Bode图中得到增益交界频率(也就是增益为1的频率),对应到相频Bode图中,若此时的相位大于-180°(如-160°),则系统闭环稳定,相位裕量为此时相位减去-180°(如-160°+180°=20°)
————————————————
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/Blue00356/article/details/113444242
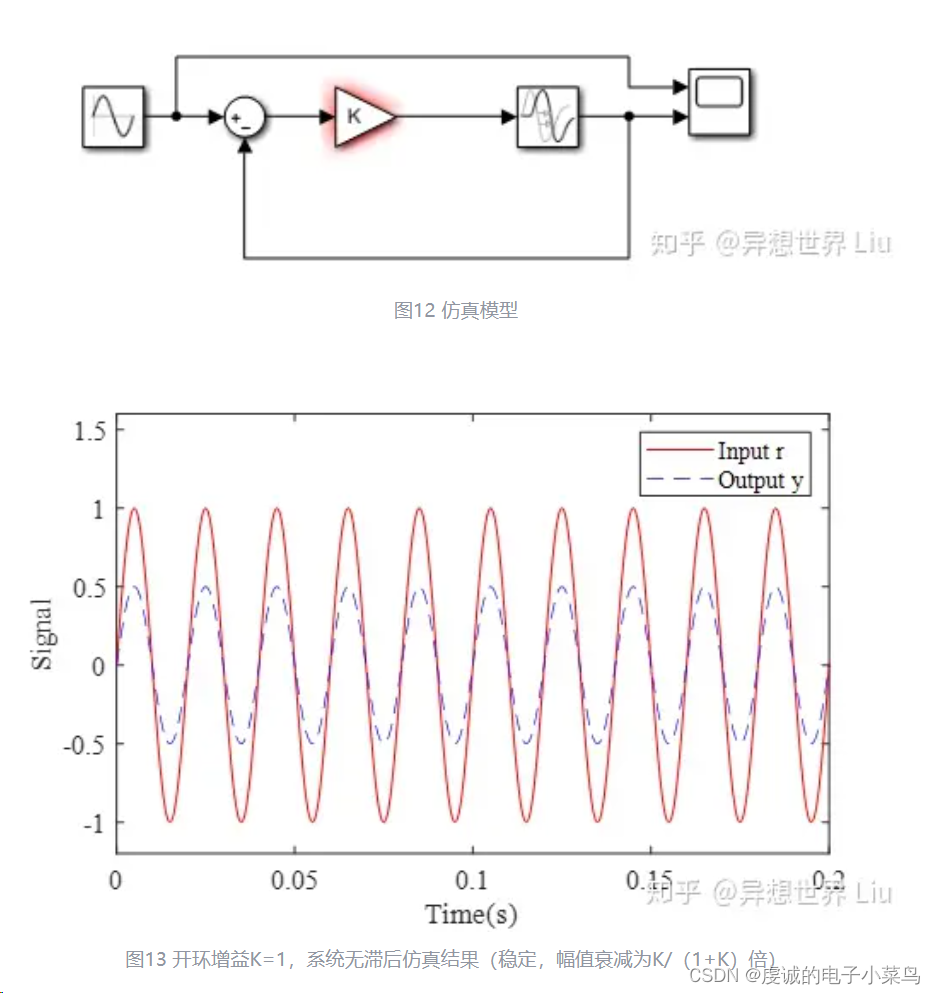
5、仿真验证
仿真模型如图12,输入信号为频率50HZ、幅值为1的正弦信号。
附录说明:本文作为本人学习硬件知识 分享学习心得所用 不作商业用途
原创:增益裕度和相位裕度的理解 - 知乎 (zhihu.com) https://zhuanlan.zhihu.com/p/328649072
https://zhuanlan.zhihu.com/p/328649072

















 2883
2883

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









