







协作机器人(二)——正运动学
文章目录
前言
协作机器人正运动学
基础回顾: 协作机器人(一)——连杆坐标系
一、标准的D-H表示法
1.1、连杆参数表
| 关节 i i i | α i \alpha_{i} αi | a i a_{i} ai | d i d_{i} di | θ i \theta_{i} θi |
|---|---|---|---|---|
| 1 | − 90 -90 −90 | 0 | d 1 d_{1} d1 | θ 1 \theta_{1} θ1 |
| 2 | 0 | a 2 a_{2} a2 | 0 | θ 2 \theta_{2} θ2 |
| 3 | 0 | a 3 a_{3} a3 | 0 | θ 3 \theta_{3} θ3 |
| 4 | − 90 -90 −90 | 0 | d 4 d_{4} d4 | θ 4 \theta_{4} θ4 |
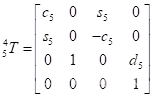
| 5 | 90 | 0 | d 5 d_{5} d5 | θ 5 \theta_{5} θ5 |
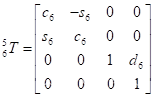
| 6 | 0 | 0 | d 6 d_{6} d6 | θ 6 \theta_{6} θ6 |
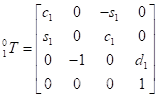
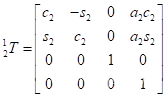
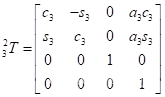
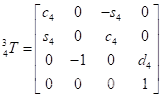
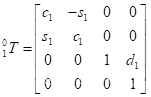
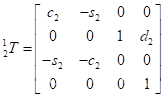
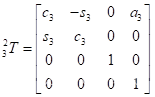
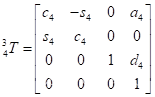
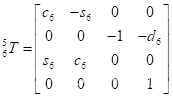
1.2、齐次变换矩阵的一般表达式

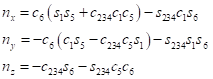
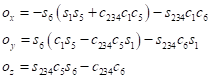
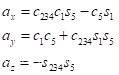
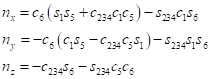
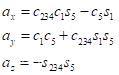
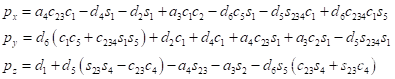
1.3、正运动学表达式
theta = [theta1 theta2 theta3 theta4 theta5 theta6];
d = [d1 0 0 d4 d5 d6];
a = [0 a2 a3 0 0 0];
alpha = [-sym(pi)/2 0 0 -sym(pi)/2 sym(pi)/2 0];


二、改进的D-H表示法
2.1、连杆参数
| 关节 i i i | α i − 1 \alpha_{i-1} αi−1 | a i − 1 a_{i-1} ai−1 | d i d_{i} di | θ i \theta_{i} θi |
|---|---|---|---|---|
| 1 | 0 | 0 | d 1 d_{1} d1 | θ 1 \theta_{1} θ1 |
| 2 | − 90 -90 −90 | 0 | d 2 d_{2} d2 | θ 2 \theta_{2} θ2 |
| 3 | 0 | a 3 a_{3} a3 | 0 | θ 3 \theta_{3} θ3 |
| 4 | 0 | a 4 a_{4} a4 | − d 4 -d_{4} −d4 | θ 4 \theta_{4} θ4 |
| 5 | − 90 -90 −90 | 0 | d 5 d_{5} d5 | θ 5 \theta_{5} θ5 |
| 6 | 90 90 90 | 0 | d 6 d_{6} d6 | θ 6 \theta_{6} θ6 |
2.2、齐次变换矩阵的一般表达式

2.3、正运动学表达式
theta = [theta1,theta2,theta3,theta4,theta5,theta6];
d = [d1,d2,0,d4,d5,d6];
a = [0,0,a3,a4,0,0];
alpha = [0,-sym(pi)/2,0,0,-sym(pi)/2,sym(pi)/2];


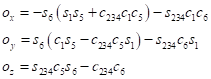
Modified D-H的姿态表示与Standard D-H的姿态表示一致,两者的位置表示不同















 2320
2320











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









