







综述。
从多传感器标定和多源数据融合两个方面进行综述。
1、多传感器标定:
时间同步:NTP(Network Time Protocal,网络时间协议)
相机/激光雷达标定:
· 特点标志物辅助计算对应点。
· 无辅助标定物。如文中提出的一种利用图像中的灰度边缘信息和雷达点云中的深度边缘信息进行匹配标定的方法。
惯性/相机标定:
通常认为IMU和相机之间的数据是时间对齐的。
惯性/激光雷达标定:
2、多传感器融合:
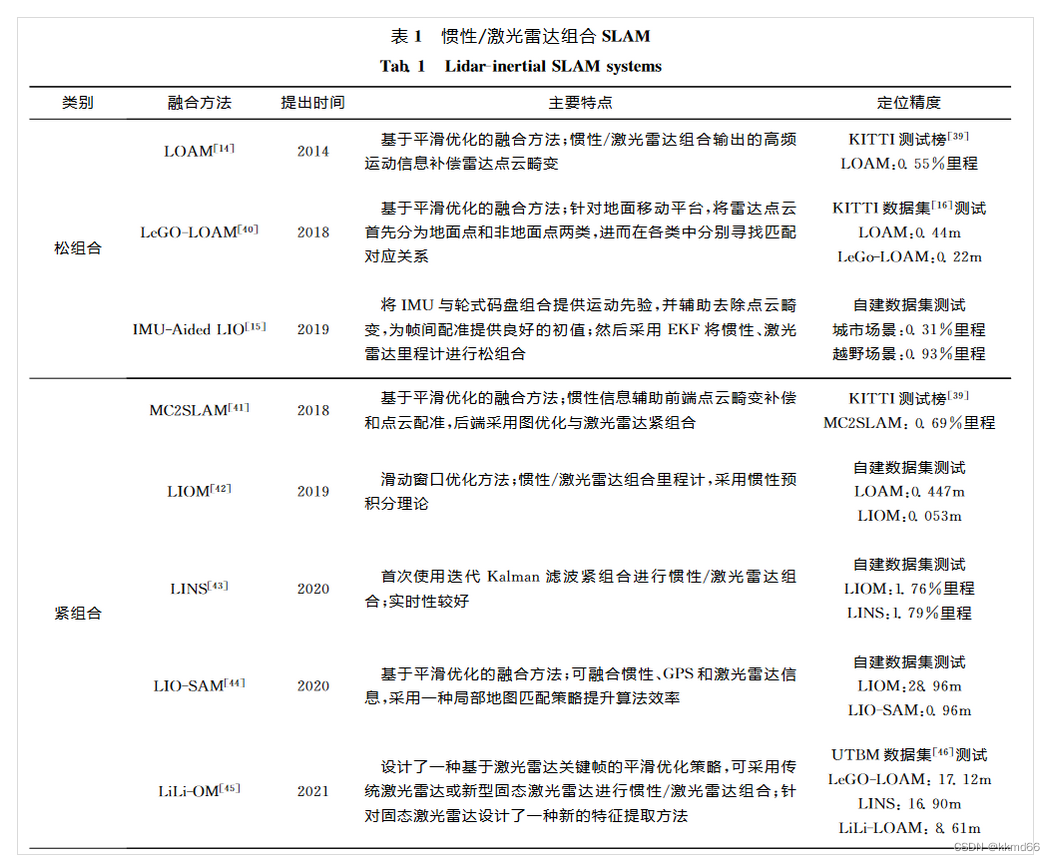
惯性/激光雷达组合SLAM:
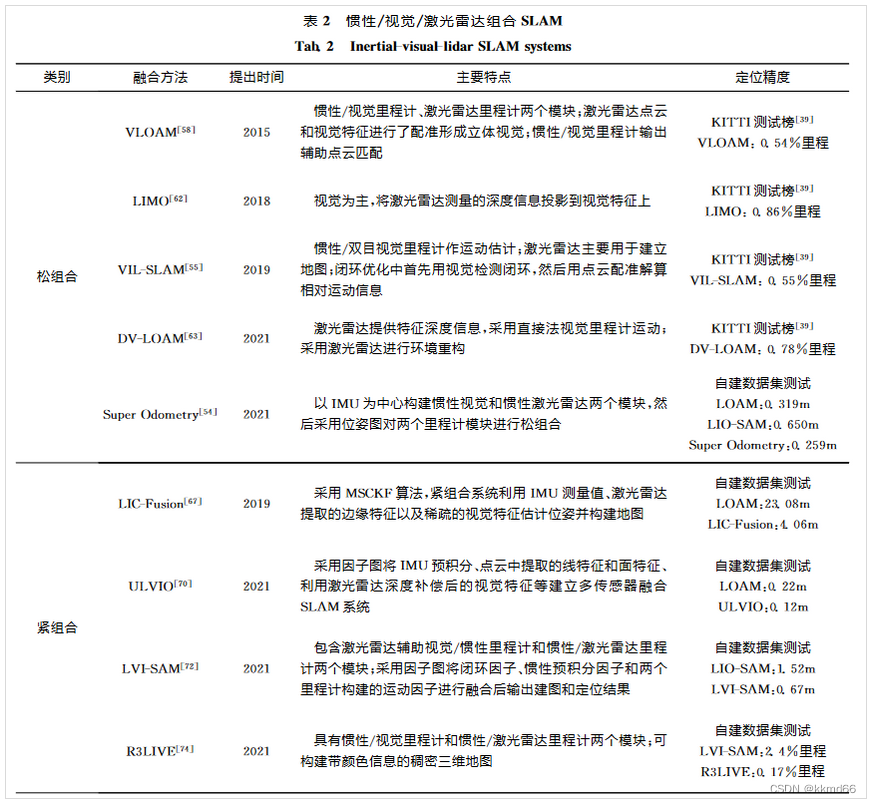
惯性/视觉/激光雷达组合SLAM:
知识点:
曲线插值:
贝塞尔曲线:
三个要点:
· 通过控制点来生成的,控制点不全在最终曲线上。
· 控制点首末的两点是最终曲线的端点(意味着首末控制点会在最终曲线上),且各自与相邻点的连线同最终曲线相切。
· 两个贝塞尔曲线如果平滑连接,则需要连接点与其左右相邻两端点共线。
总结:
· 在两点中生成贝塞尔曲线,且这两个点作为三次贝塞尔曲线的两个端点。
· 在确定额外两个控制点,控制点设定满足两相邻的贝塞尔曲线连接点和其连接点左右控制点共线。
B样条插值:















 1126
1126











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









