






联合仿真需求分析报告
一、项目背景
随着汽车技术的快速发展,自动驾驶和智能网联汽车已成为行业发展的重要趋势。为确保自动驾驶车辆在复杂交通环境中的安全性和可靠性,进行联合仿真测试显得尤为重要。本报告旨在明确联合仿真的具体需求,为后续仿真测试提供指导。
二、仿真目标
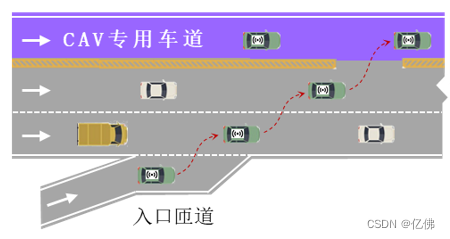
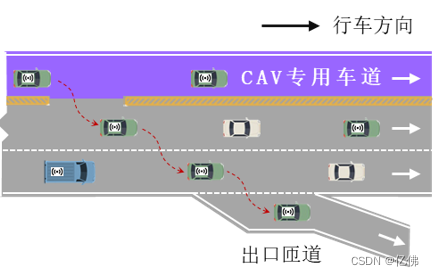
- 验证自动驾驶车辆在单向三车道高速公路(包括入口匝道、专用车道入口、普通直路、专用车道出口、出口匝道)中的行驶性能。
- 测试自动驾驶车辆与网联车辆(CAV)及传统人驾驶车辆(HDV)的交互能力。
- 评估自动驾驶车辆在不同交通密度和天气条件下的适应性。
三、仿真场景
- 场景设置:单向三车道高速公路,包含入口匝道、专用车道入口、普通直路、专用车道出口、出口匝道等典型路段。
- 车辆类型:自动驾驶车辆(主车)、网联自动驾驶车辆(CAV)、传统人驾驶车辆(HDV)。
- 交通流量:根据实际需求设定不同交通密度,模拟不同时段和路段的交通状况。
- 天气条件:包括晴天、雨天、雾天等多种天气状况,以测试自动驾驶车辆在不同天气下的适应性。
四、仿真需求
- 车辆模型:
- 自动驾驶车辆(主车):采用驾驶座舱控制,具备完整的自动驾驶功能。
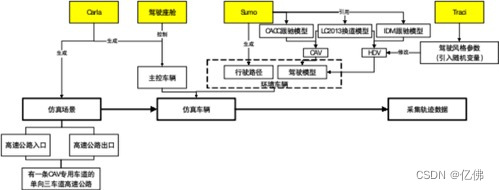
- 网联自动驾驶车辆(CAV):采用CACC(协同自适应巡航控制)模型进行跟驰,LC2013模型进行换道。
- 传统人驾驶车辆(HDV):采用IDM(智能驾驶员模型)进行跟驰,LC2013模型进行换道。HDV的IDM模型参数可根据需要加入随机值,以模拟人类驾驶的多样性。
- 交互能力:
- 自动驾驶车辆需具备与网联车辆(CAV)的通信能力,实现信息共享和协同驾驶。
- 自动驾驶车辆需能够识别并响应传统人驾驶车辆(HDV)的驾驶行为,确保安全交互。
- 数据采集:
- 采集每辆车的速度、位置、加速度等实时数据,用于后续分析和评估。
- 记录仿真过程中的交通事件(如碰撞、换道等),以便分析自动驾驶车辆的决策和响应能力。
- 仿真软件:
- 使用SUMO(Simulation of Urban MObility)等成熟的仿真软件构建仿真环境。
- 自动驾驶车辆的控制算法和决策逻辑需在仿真环境中进行集成和验证。
五、仿真流程
- 确定仿真场景和车辆类型。
- 配置仿真软件并构建仿真环境。
- 导入车辆模型和交通流量数据。
- 运行仿真并采集数据。
- 分析仿真结果并评估自动驾驶车辆的性能。
六、仿真流程图
- 确定仿真目标
- 识别并明确仿真的主要目的和目标。
- 设定仿真的关键性能指标(KPIs)。
- 定义仿真范围
- 确定仿真的系统边界。
- 识别并包括所有必要的组件、交互和约束。
- 数据收集
- 收集系统输入数据,如初始条件、参数设置等。
- 验证和清理数据以确保准确性。
- 建立仿真模型
- 选择合适的仿真软件或工具。
- 根据系统特性和仿真目标,建立数学模型或物理模型。
- 设置模型参数和初始条件。
- 模型验证
- 通过与已知数据或实验结果进行比较,验证模型的准确性。
- 进行敏感性分析,确定模型参数对输出的影响。
- 运行仿真
- 设置仿真运行的时间步长、迭代次数等参数。
- 启动仿真并监控其进程。
- 收集仿真输出数据,如系统状态、性能指标等。
- 结果分析
- 分析仿真结果,识别系统中的关键问题和趋势。
- 使用统计方法、可视化工具等对数据进行处理和分析。
- 报告编写
- 编写仿真报告,总结仿真过程、结果和发现。
- 提供对仿真结果的解释和讨论。
- 决策支持
- 使用仿真结果来支持决策制定。
- 评估不同策略或方案的效果和可行性。
- 迭代优化
- 根据仿真结果和反馈,调整模型参数或改进模型结构。
- 重复运行仿真以验证改进的有效性。
- 模型维护
- 定期更新和维护仿真模型,以反映系统变化和新数据。
- 记录模型变更和版本信息。
- 知识转移与培训
- 将仿真知识和经验转移给团队成员或利益相关者。
- 提供必要的培训和支持,以确保仿真活动的可持续性。
模型部分代码示例(以SUMO和Python为例)
由于SUMO的模型配置通常通过XML文件或SUMO的Python API进行,以下是一个简化的Python代码示例,用于设置车辆类型和模型:
import sumolib # SUMO的Python库
# 假设已经有一个配置好的SUMO网络文件network.xml
net = sumolib.net.readNet("network.xml")
# 创建一个车辆类型列表,包含CAV和HDV
vehicle_types = [
sumolib.vehicle.VehicleType(id="CAV", carFollowModel="CACC", lcModel="LC2013"),
sumolib.vehicle.VehicleType(id="HDV", carFollowModel="IDM", lcModel="LC2013",
# 这里可以添加IDM模型的参数修改,包括随机值
parameter={"someIDMParam": "valueWithRandomness"})
]
# 将车辆类型添加到SUMO网络中
for vt in vehicle_types:
net.addVehicleType(vt)
# 假设已经有一个配置好的车辆投放文件routes.rou.xml
# 使用SUMO命令行工具加载网络、车辆投放和车辆类型,并运行仿真
# 注意:这里只是一个示例命令,实际使用时需要根据你的SUMO安装和配置进行调整
sumo_cmd = ["sumo", "-n", "network.xml", "-r", "routes.rou.xml", "--vehicle-types-file", "vehicle_types.xml", "--duration", "3600"]
# 执行SUMO命令(在实际代码中,你可能需要使用subprocess模块或其他方法来执行这个命令)
# ...
# 仿真运行后,你需要解析SUMO的输出文件(如.sumocfg、.sumo.csv等)来获取车辆数据
# 这通常涉及到读取CSV文件并使用Python的数据处理库(如pandas)进行分析
















 6207
6207

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









