







 本文详细介绍了四旋翼无人机的飞行原理,包括垂直运动、俯仰运动、滚转运动和偏航运动,通过调整不同电机的转速来实现各种飞行姿态。同时,文章提到了动力学分析对理解飞行控制的重要性。
本文详细介绍了四旋翼无人机的飞行原理,包括垂直运动、俯仰运动、滚转运动和偏航运动,通过调整不同电机的转速来实现各种飞行姿态。同时,文章提到了动力学分析对理解飞行控制的重要性。
转速与飞行方式说明
参考博客:
https://blog.csdn.net/qq_27270029/article/details/79877022
https://blog.csdn.net/sinat_29315697/article/details/81293458
https://blog.csdn.net/mmqqyyqqyyq/article/details/83870933
“X”型飞行姿态垂直运动与“+”型飞行姿态相同,只要同时增加或者减小电机M1、M2、M3、M4的转速就能让飞行器实现垂直运动,如图(a)所示。
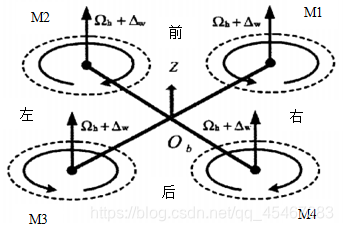
(a)垂直运动
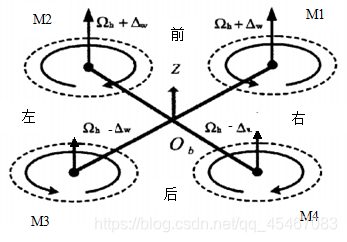
如果想让四旋翼前后飞行,实现俯仰运动,如果将M1、M2的转速减小或者将M3、M4增加时,四旋翼会产生向前上方的力,使四旋翼向前飞行。反之,如果将M1、M2的转速增加或者将M3、M4减小时,四旋翼会产生向后上方的力,使四旋翼向后飞行,如图(b)所示。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 7568
7568

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











