







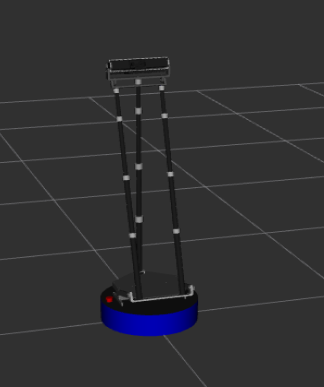
机械结构
底部是固定盘,上部是可转动盘。两个眼,一个可以发射红外激光,一个接受传回来的红外数据。本质上就是可以快速旋转的红外测距。
性能的好坏取决于旋转速度、扫描频率。
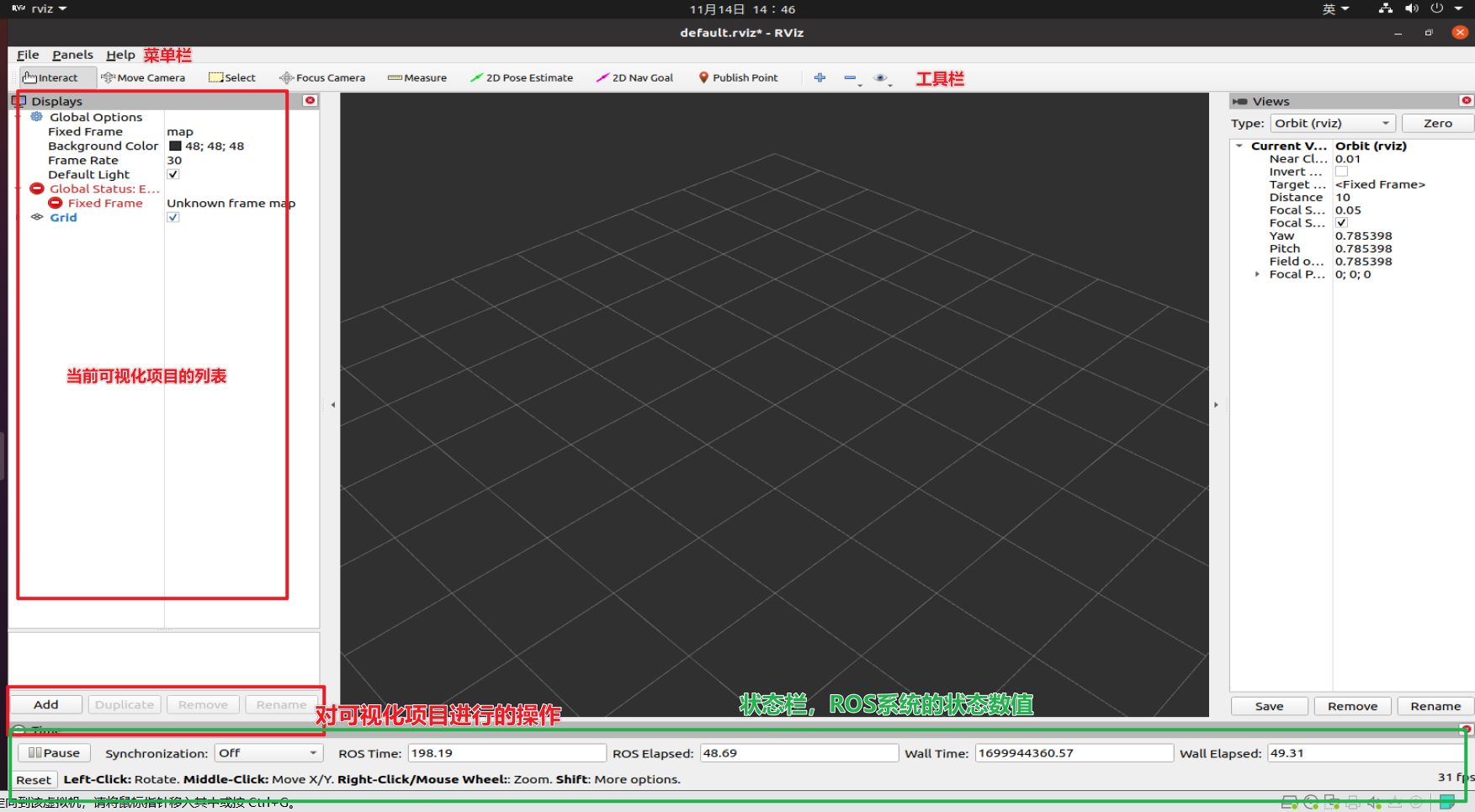
RViz
一个可视化工具,方便对于机器人状态进行观测的工具。
运行
启动wpr_simulation下的wpb_simple.launch
roslaunch wpr_simulation wpb_simple.launch
启动rviz
rviz
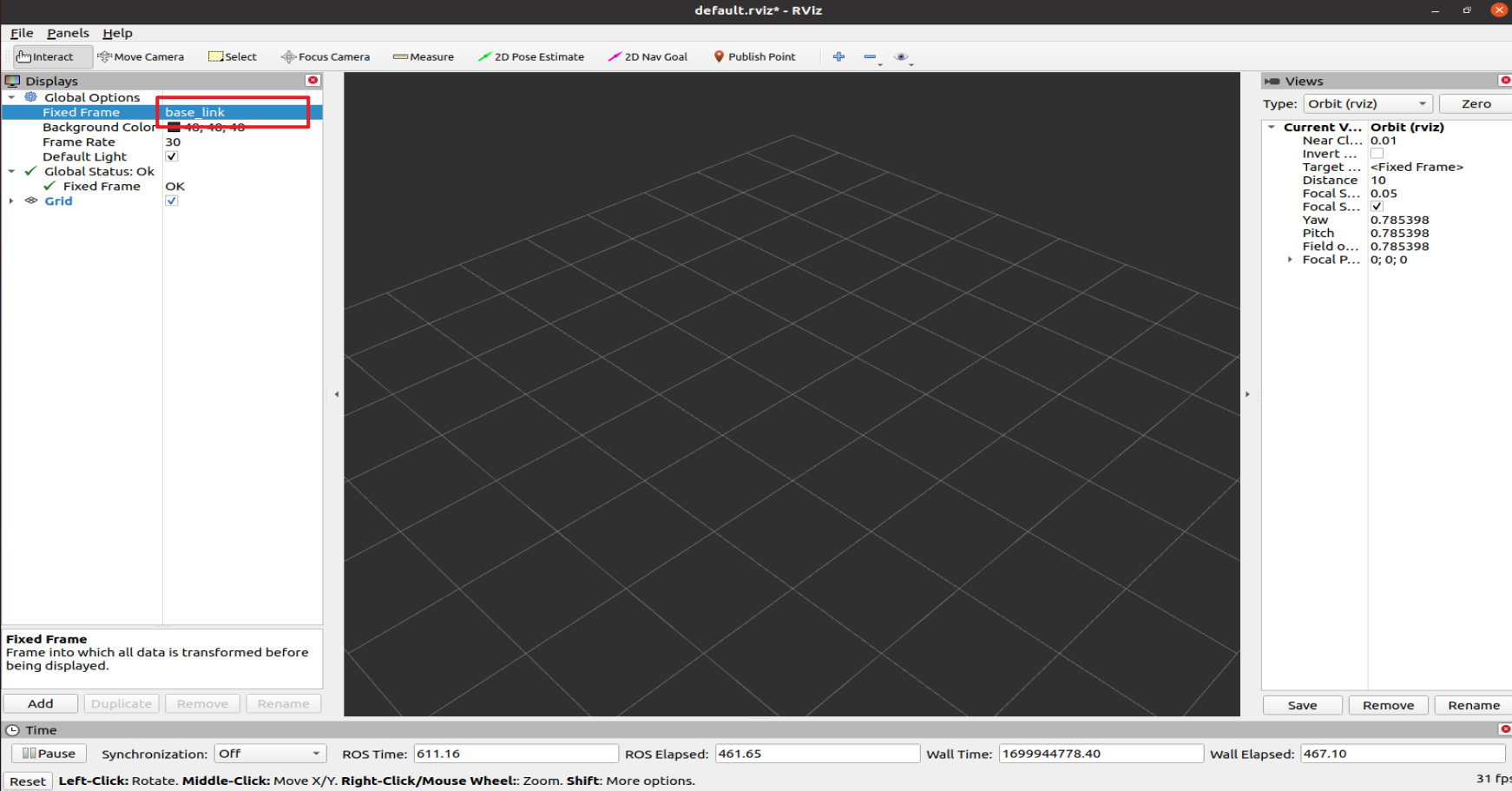
把Fixed Frame修改成base_footprint
把所需的机器人模型添加进来
点击Add
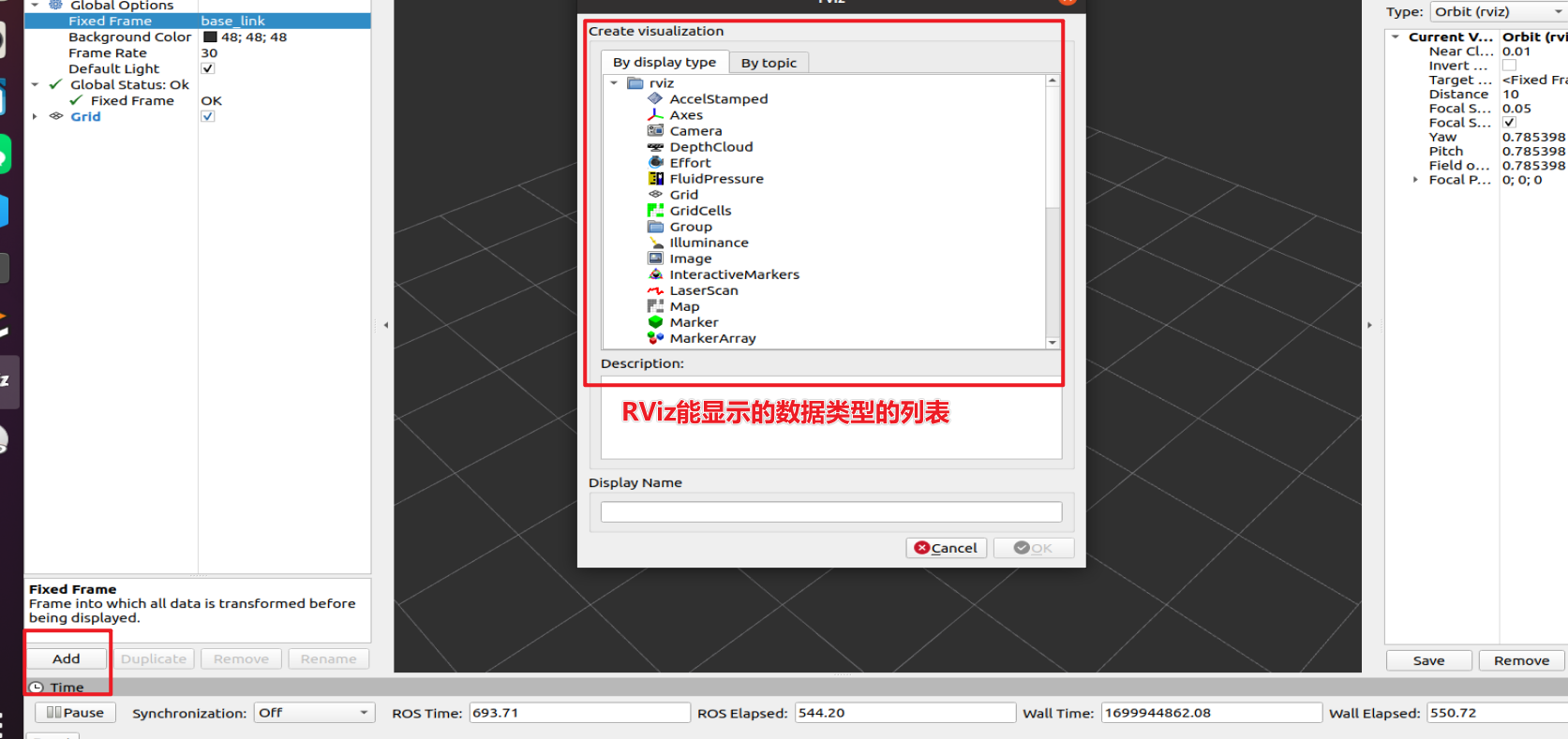
选择RobotModel
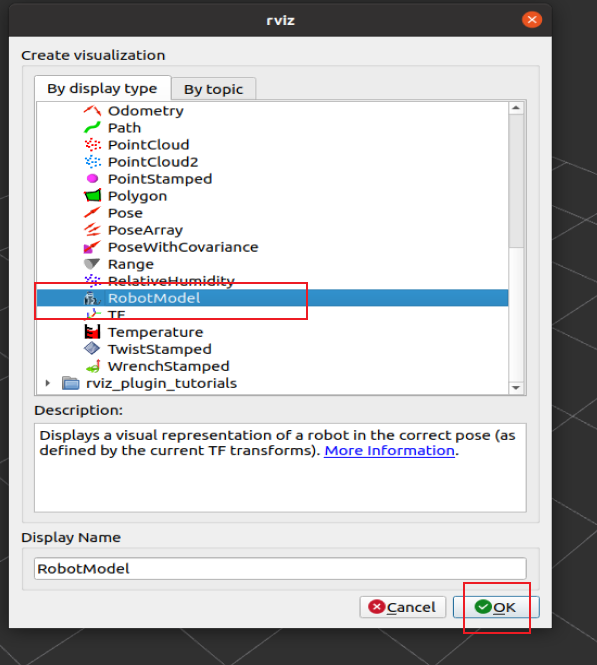
成功召唤出小robot
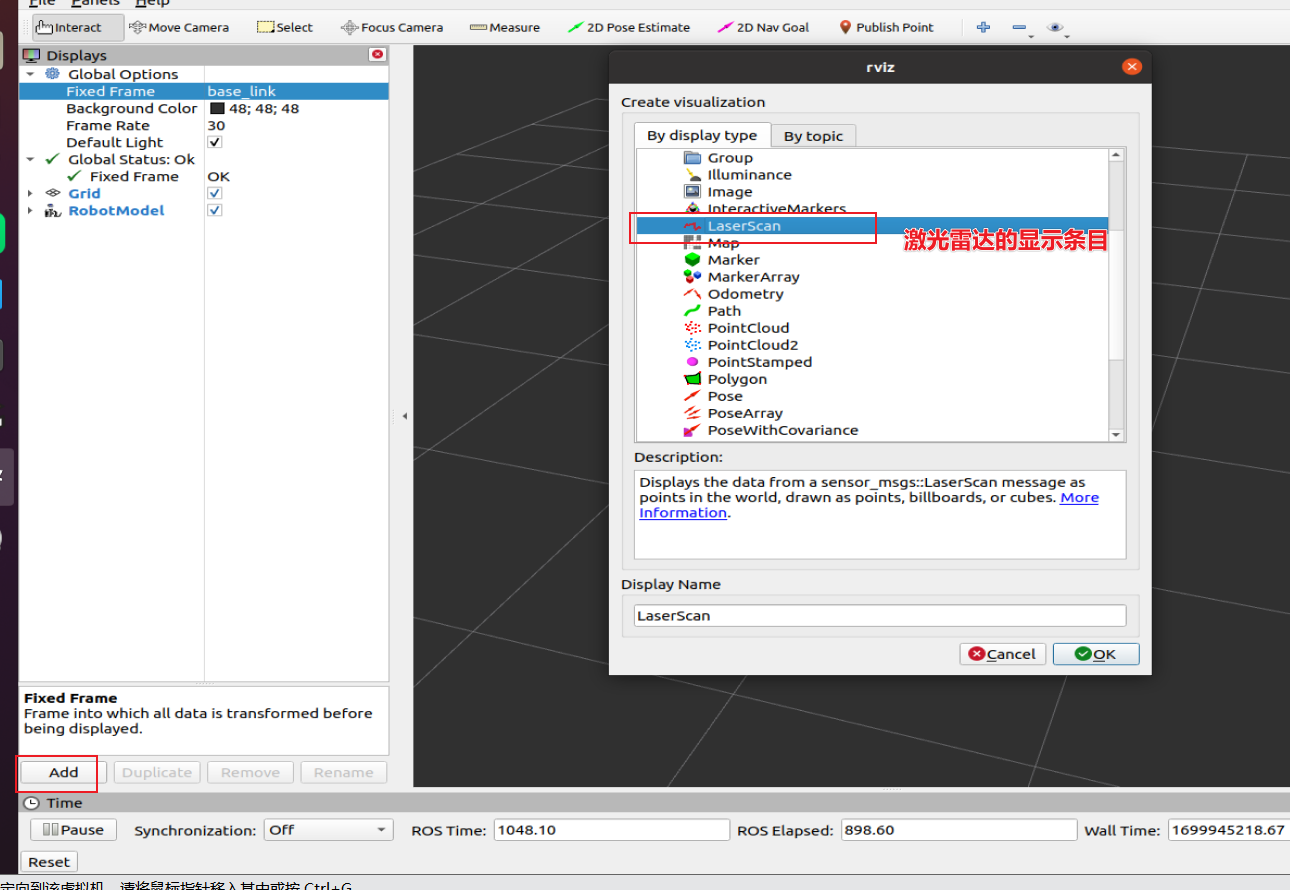
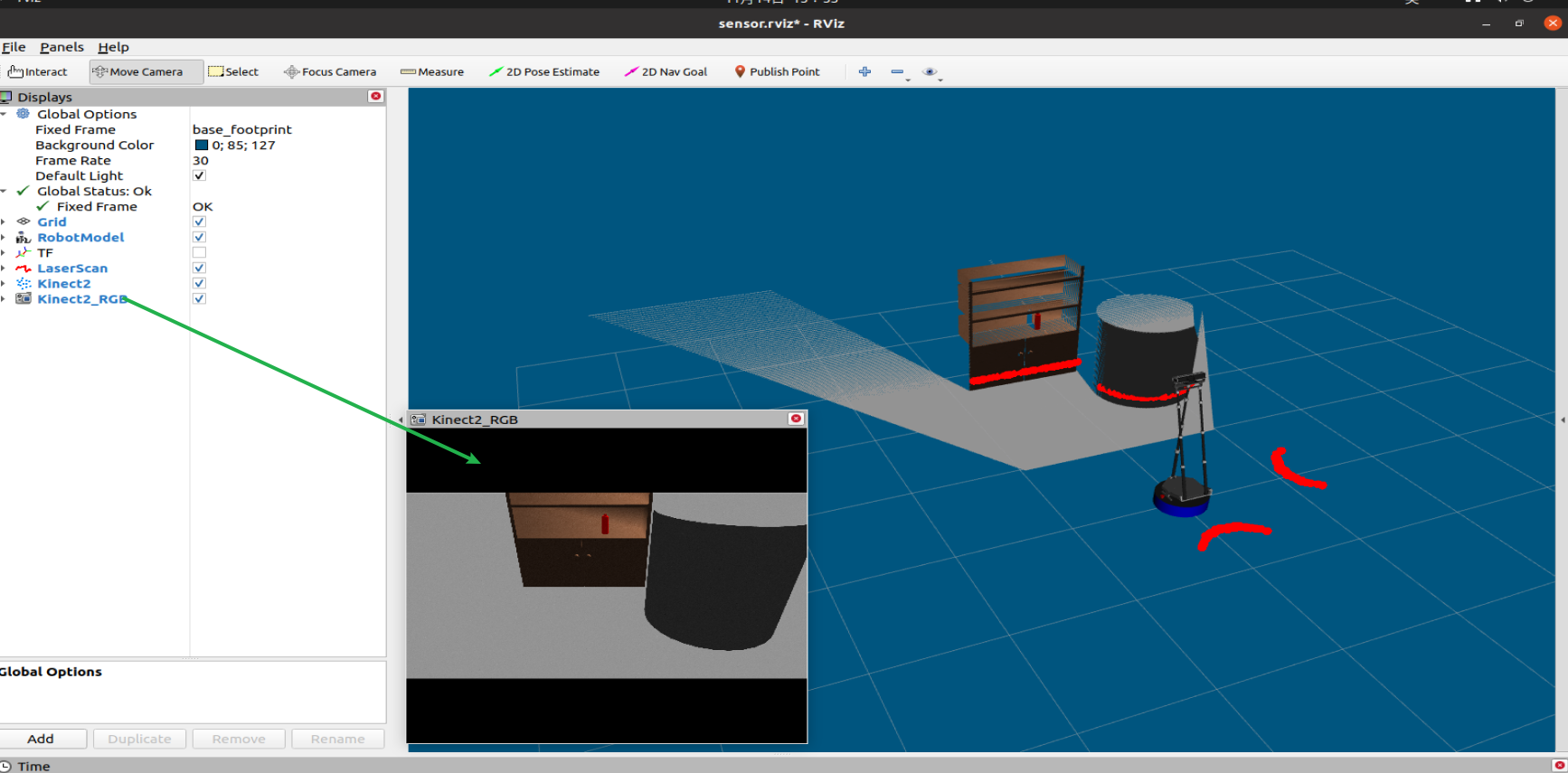
添加激光雷达的显示条目
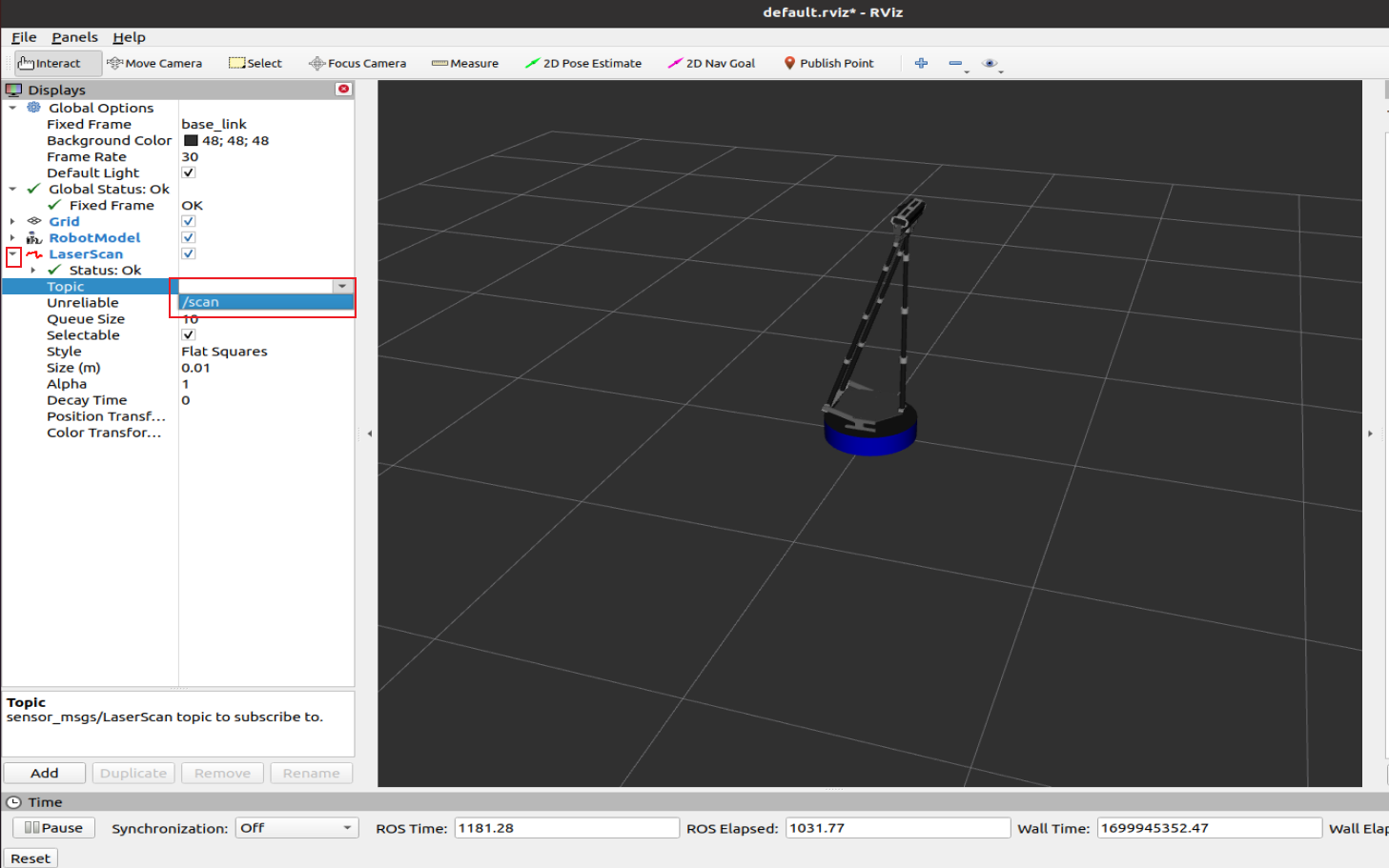
可以观测到一排红点
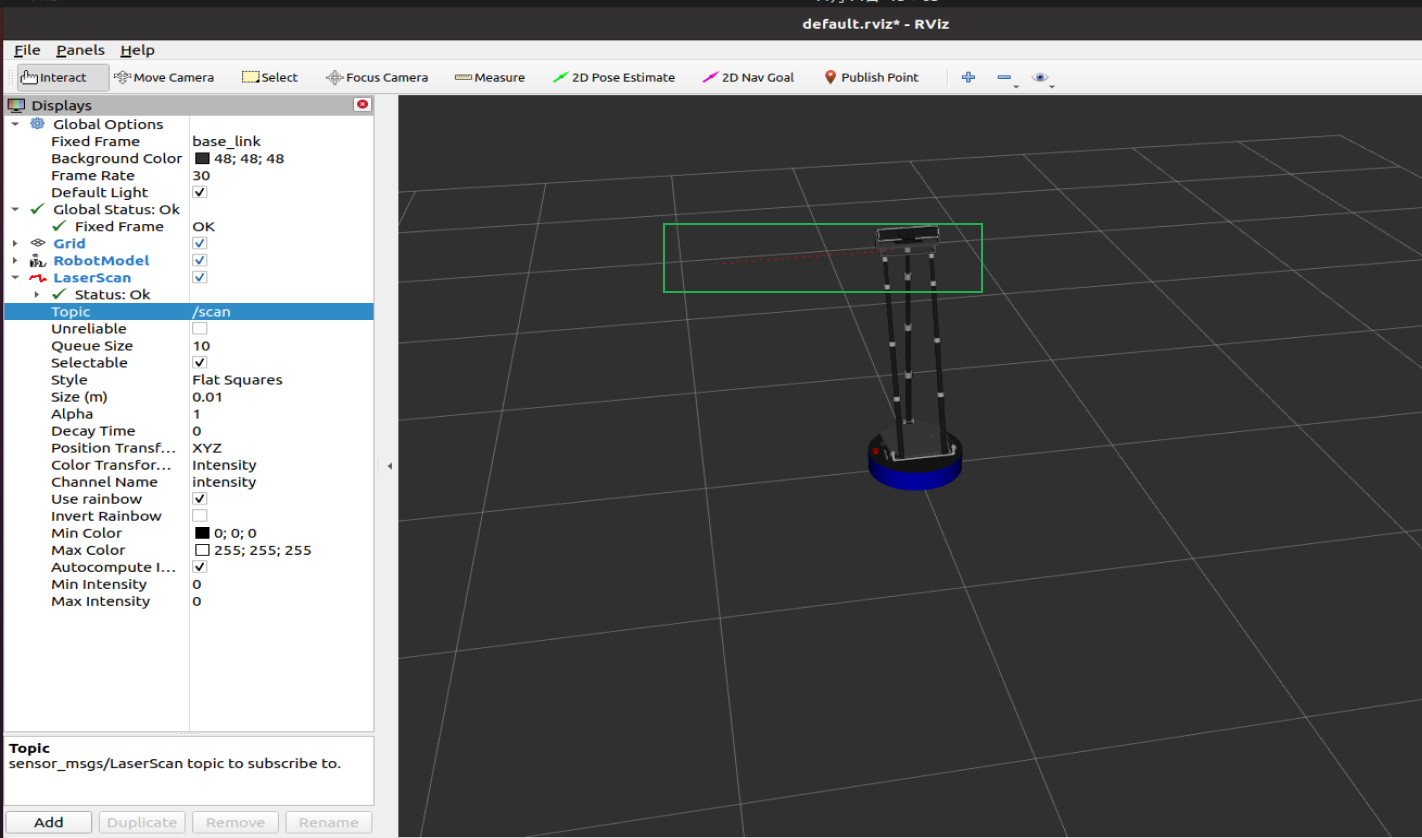
尺寸太小不方便观测,可以修改左侧的size。
鼠标左键点击图像窗口拖动,可以改变视角
一般对界面大小的操作就是鼠标进行放大缩小。
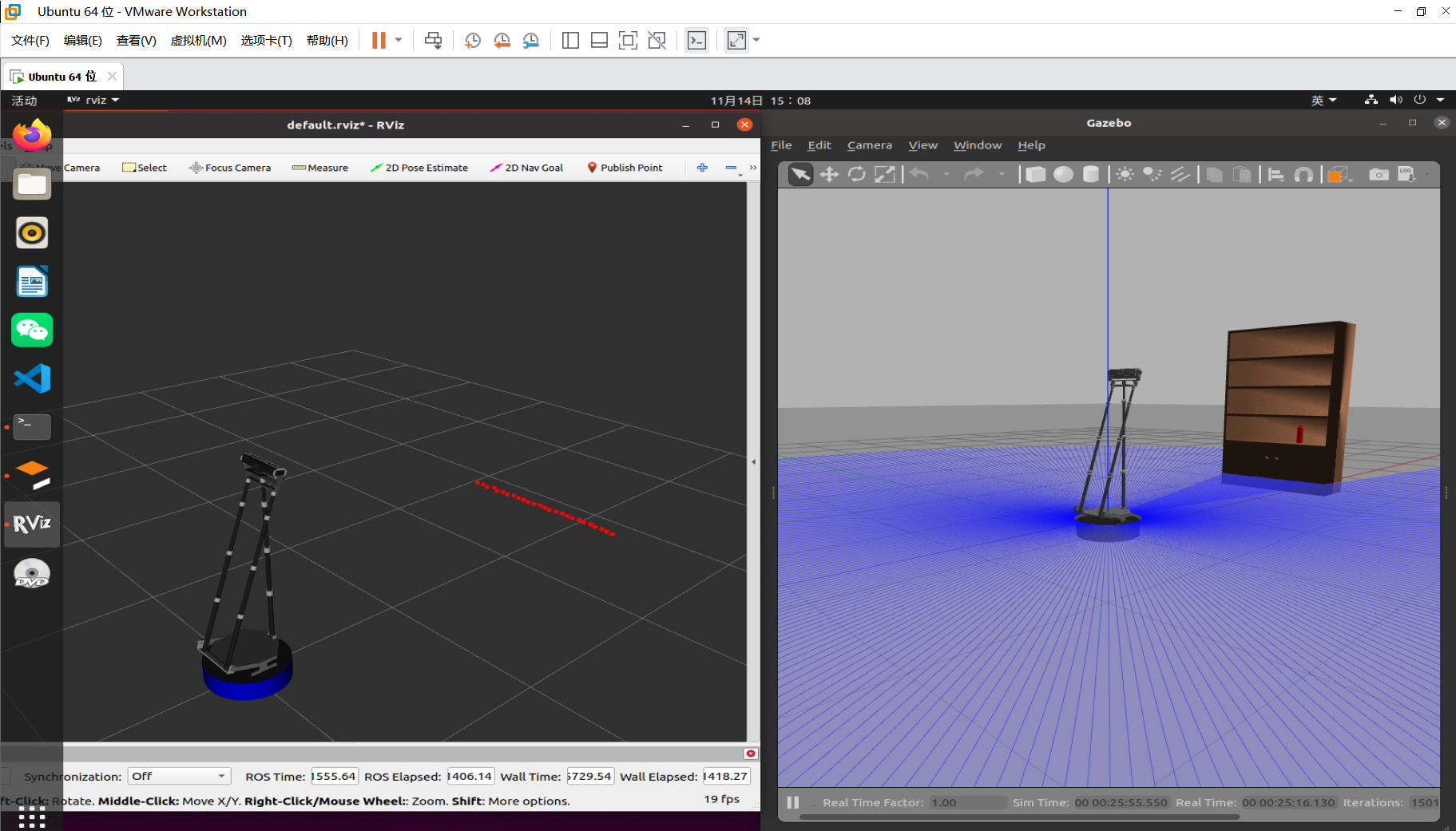
可以看到,在Gazebo中添加的东西,在RViz中会观测到。
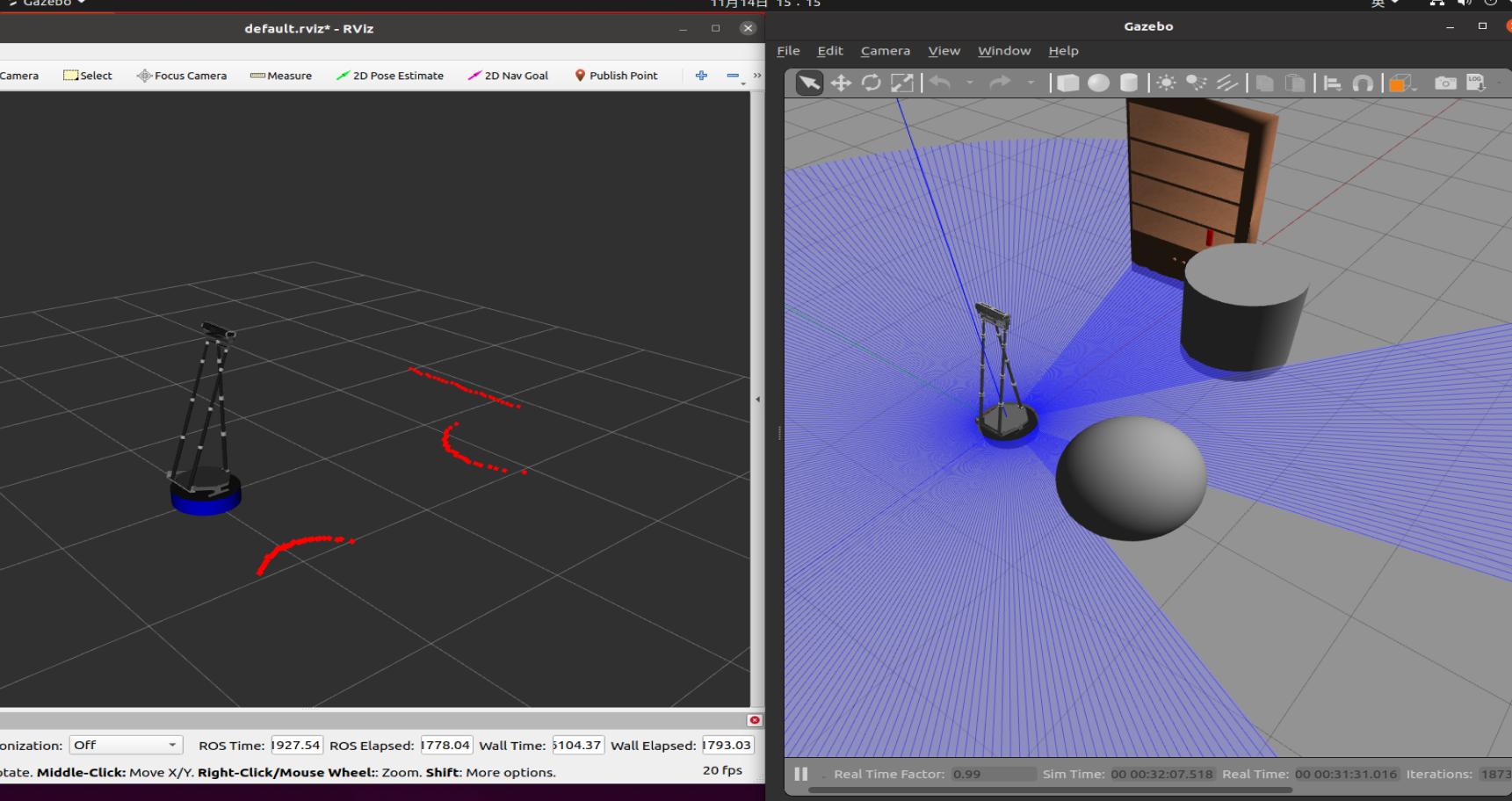
蓝色的扫描线即发射出去的激光信号。
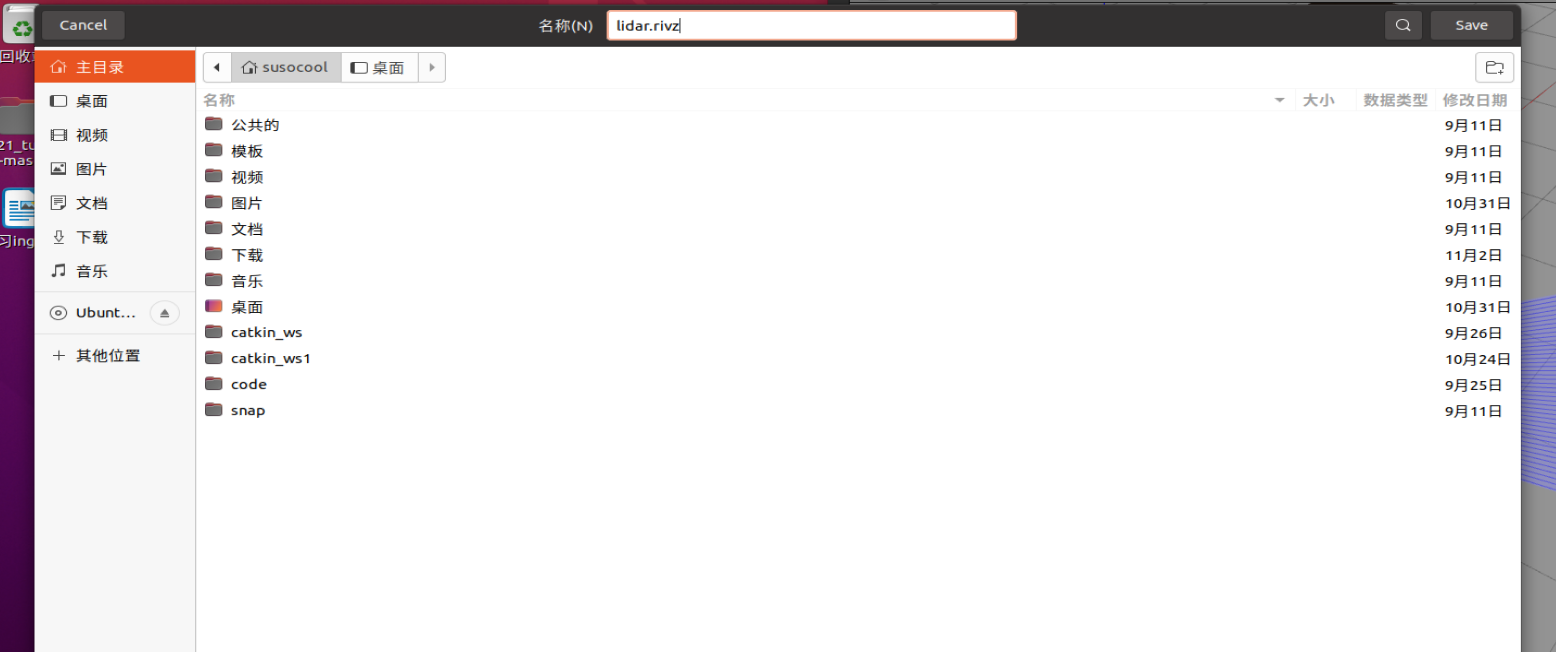
为了方便,可以保存当前配置另存为文件。
ctrl+shift+s
快速清除中断
clear
可以关闭掉rviz之后重新导入文件,open config
必须是在rviz中打开配置!

也可以靠运行wpr_simulation的wpb_rviz.launch出理想结果
roslaunch wpr_simulation wpb_rviz.launch
区别
** Gazebo是模拟真实机器人发出的传感器数据的工具,即虚拟机器人所处的环境状况
RViz接收传感器数据并进行显示的工具,即机器人实际能探测到的环境状况。不参与机器人算法的运行,只是一个观测工具。**
总结
介绍雷达的原理;
介绍RViz的用法,创建雷达,进行简易数据收发。















 435
435











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









