






在上一部分我们安装了ROS并演示了一个入门实例
ROS学习笔记(1)ROS安装
在三个终端分别运行以下指令
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key

- 查看计算图
rqt_graph

如上图左右两个节点,其中一个打开仿真器节点,一个管理键盘的结点,中间通过话题(rostopic)连接起来。
- 显示结点相关信息
rosnode

rosnode list

rosnode info /turtlesim

- 查看话题(topic)相关信息
rostopic

rostopic list

rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
## pub表示发布话题
## pub之后是针对哪个rostopic
## 输入完rostopic pub /turtle1/cmd_vel
## 之后按两次Tab键会补全后面的内容,然后键盘的左右箭头可以到指定位置更改内容
## geometry_msgs/Twist是发布topic的消息,后面是具体数据内容
## linear是线速度,angular是角速度
运行这段命令后会看到乌龟动一下然后停止

rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
## 加上 -r 10 表示1s发送10次这个命令

- 查看消息相关内容
rosmsg show geometry_msgs/Twist

- 查看服务相关内容
rosservice list

rosservice call /spawn "x: 3.0
y: 5.0
theta: 0.0
name: 'turtle2'"
## 发送请求request在仿真器新加一个坐标(3.0,5.0)角度0.0名称为turtle2的海龟

rostopic list
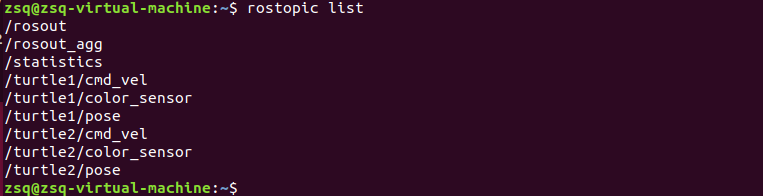
可以看到新加的turtle2海龟相关的topic已经有了我们可以通过topic控制turtle2了
- 话题记录与话题复现
rosbag record -a -o cmd_record
可以选中键盘控制命令窗口,然后让海龟动一动,之后ctrl+c结束命令
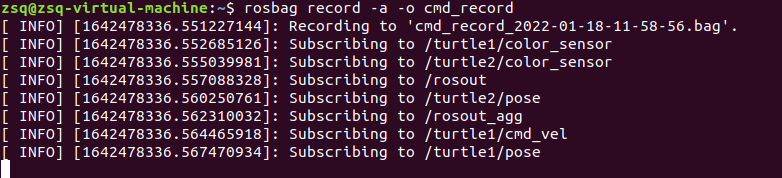
会将话题保存到以下位置

现在关掉所有命令窗口,然后新建两个终端分别启动ros和仿真器
roscore
rosrun turtlesim turtlesim_node
新建终端复现话题
rosbag play cmd_record.bag
## 这里注意cmd然后用Tab键补全,因为这个保存的文件后面可能还有其他信息
## 直接运行上面命令运行不成功


可以看到海龟在复现之前的topic















 485
485











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









