







自控原理学习笔记
自控原理学习笔记专栏
第一章——反馈控制系统的动态模型
第二章——控制系统稳定性分析
第三章——连续时间系统性能分析
第四章——自动控制系统校正与综合
第五章——线性离散系统
文章目录
1. 结构图:
1.1串联结构:
- 定义:一个环节的输出等于另一个环节的输入
- 传递函数:
G ( s ) = Y ( s ) U ( s ) = Y ( s ) U 1 ( s ) ∗ U 1 ( s ) U ( s ) = G 1 ( s ) ∗ G 2 ( s ) G(s)=\frac{Y(s)}{U(s)}=\frac{Y(s)}{U_1(s)}*\frac{U_1(s)}{U(s)}=G_1(s)*G_2(s) G(s)=U(s)Y(s)=U1(s)Y(s)∗U(s)U1(s)=G1(s)∗G2(s)

1.2 并联结构:
-
定义:两个环节的输入相同,而输出相加或相减为总的输出
-
传递函数:
G ( s ) = Y ( s ) U ( s ) = Y 1 ( s ) U ( s ) ± Y 2 ( s ) U ( s ) = G 1 ( s ) ± G 2 ( s ) G(s)=\frac{Y(s)}{U(s)}=\frac{Y_1(s)}{U(s)}\pm\frac{Y_2(s)}{U(s)}=G_1(s)\pm G_2(s) G(s)=U(s)Y(s)=U(s)Y1(s)±U(s)Y2(s)=G1(s)±G2(s)

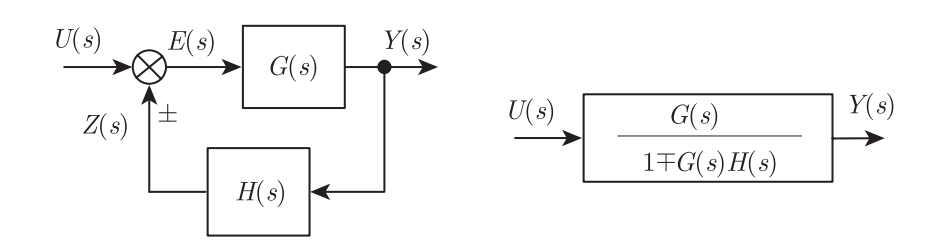
1.3 反馈结构:
-
定义:每个环节的输出作为另一个环节的输入,从整体上看,系统的输出信号对系统的控制作用产生直接影响,形成闭合环路
-
传递函数
G y u ( s ) = G ( s ) 1 ± G ( s ) H ( s ) G_{yu}(s)=\frac{G(s)}{1 \pm G(s)H(s)} Gyu(s)=1±G(s)H(s)G(s)
求解过程:
E ( s ) = U ( s ) ± Z ( s ) = U ( s ) ± H ( s ) Y ( s ) Y ( s ) = G ( s ) [ U ( s ) ± H ( s ) Y ( s ) ] = G ( S ) 1 ∓ G ( s ) H ( s ) U ( s ) G y u ( s ) = Y ( s ) U ( s ) = G ( s ) 1 ∓ G ( s ) H ( s ) E(s)=U(s)\pm Z(s)=U(s)\pm H(s)Y(s)\\ Y(s)=G(s)[U(s) \pm H(s)Y(s)]=\frac {G(S)}{1 \mp G(s)H(s)}U(s)\\ G_{yu}(s)=\frac{Y(s)}{U(s)}=\frac{G(s)}{1 \mp G(s)H(s)} E(s)=U(s)±Z(s)=U(s)±H(s)Y(s)Y(s)=G(s)[U(s)±H(s)Y(s)]=1∓G(s)H(s)G(S)U(s)Gyu(s)=U(s)Y(s)=1∓G(s)H(s)G(s)
1.4 Matlab实现三种结构
1.4.1 传递函数的实现:
num=[1 1 1];%%x^2+x+1
den=conv([2 1],[1 3]);%%(2x+1)*(x+3)
G=tf(num,den);%%tf()为传递函数
1.4.2 结构的实现:
假设两个环节传递函数为G和H:
| 结构 | 函数 |
|---|---|
| 串联结构 | series(G,H)或者G*H |
| 并联结构 | G+H或者G-H或者parallel(G,H) |
| 反馈结构 | feedback(G,H,+1/-1) |
1.5 结构图求解方法
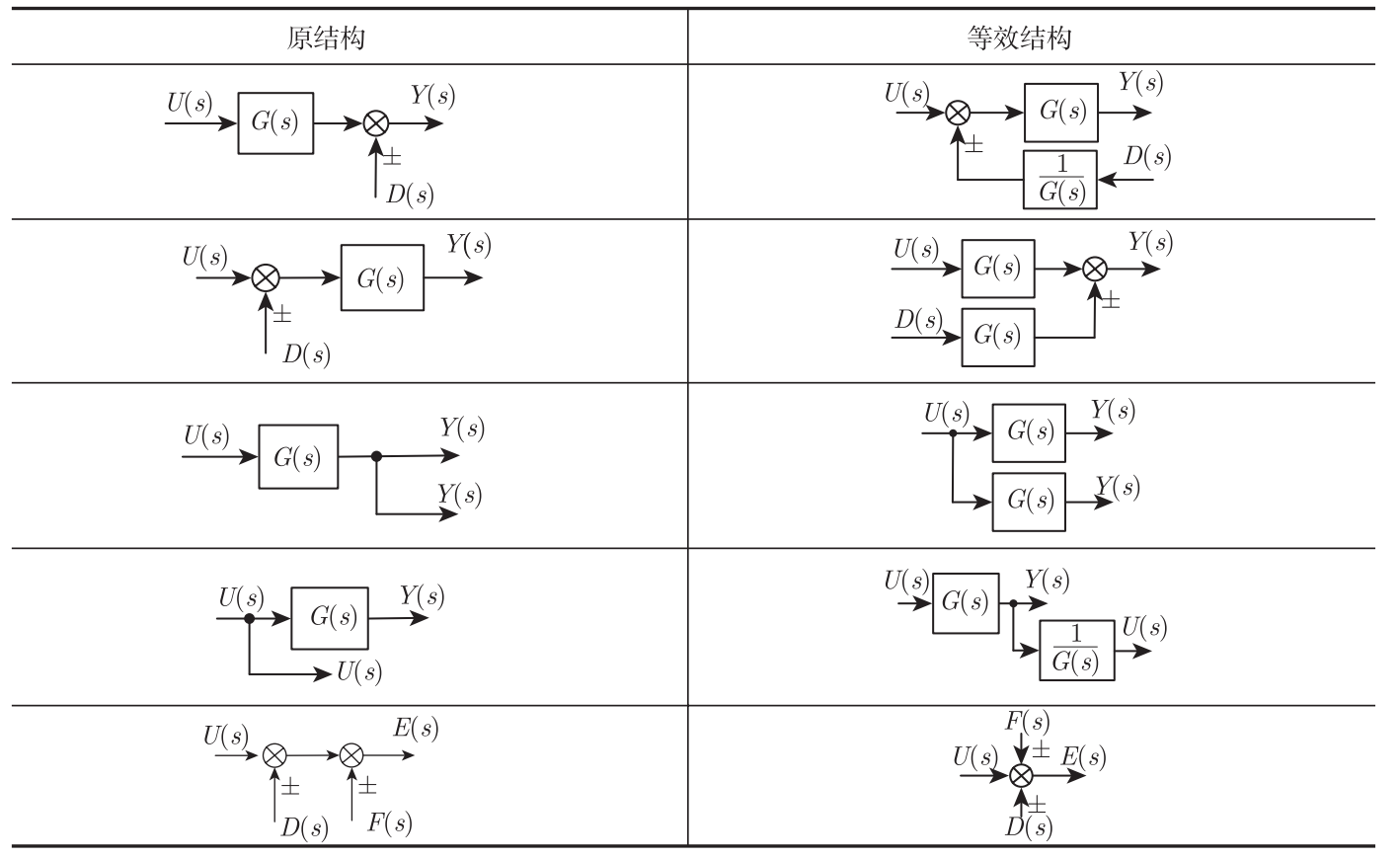
1.5.1常用结构图化简等价关系
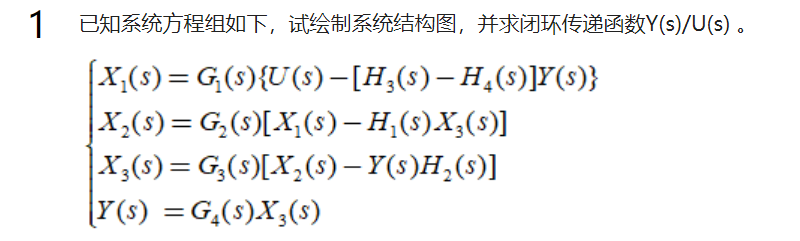
1.5.2 求解思路:
1.复杂的反馈系统:
- 找到串联、并联支路进行合并。
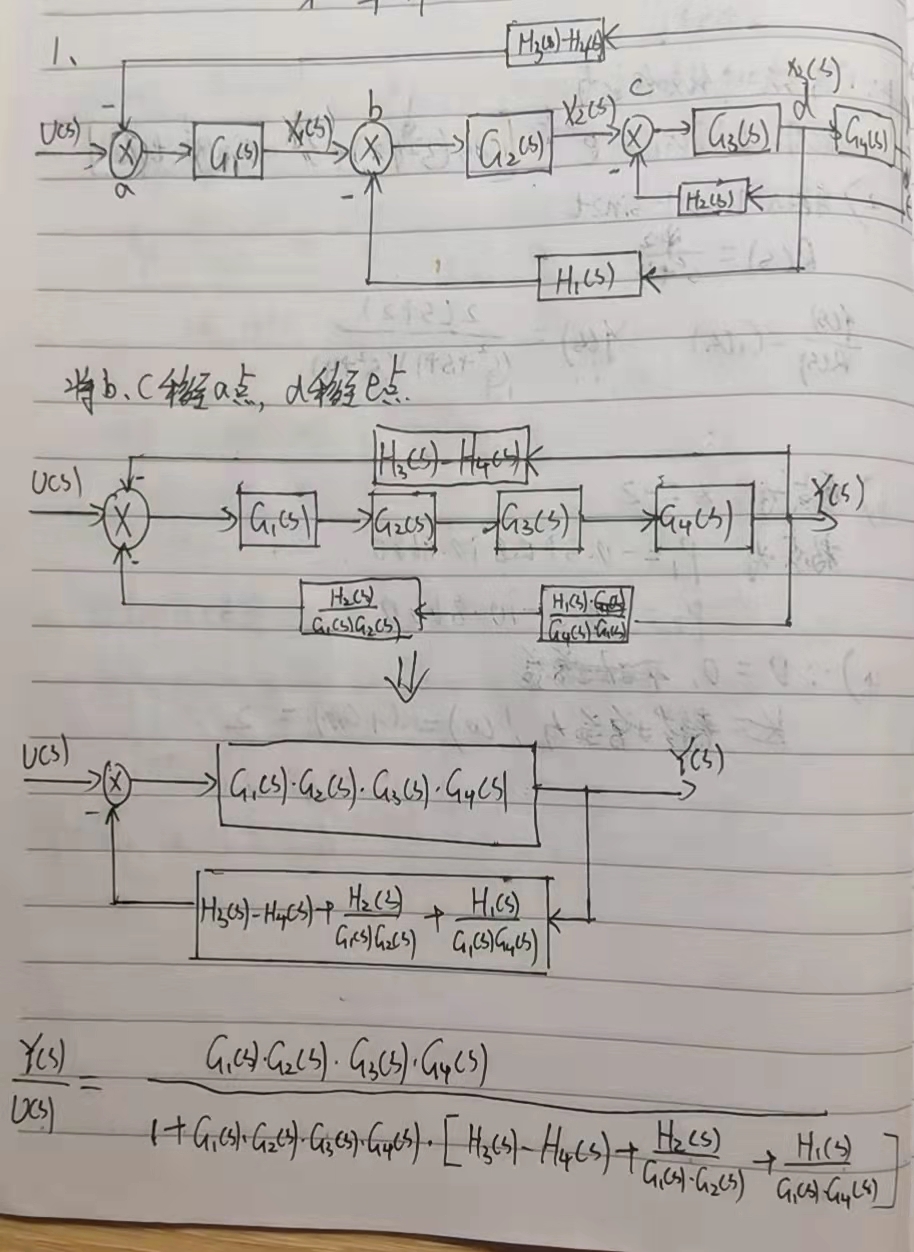
- 将比较点进行平移,化简成最简反馈结构,利用公式求解传递函数
2.简单的系统:
通过列写方程求出输入和输出的函数关系
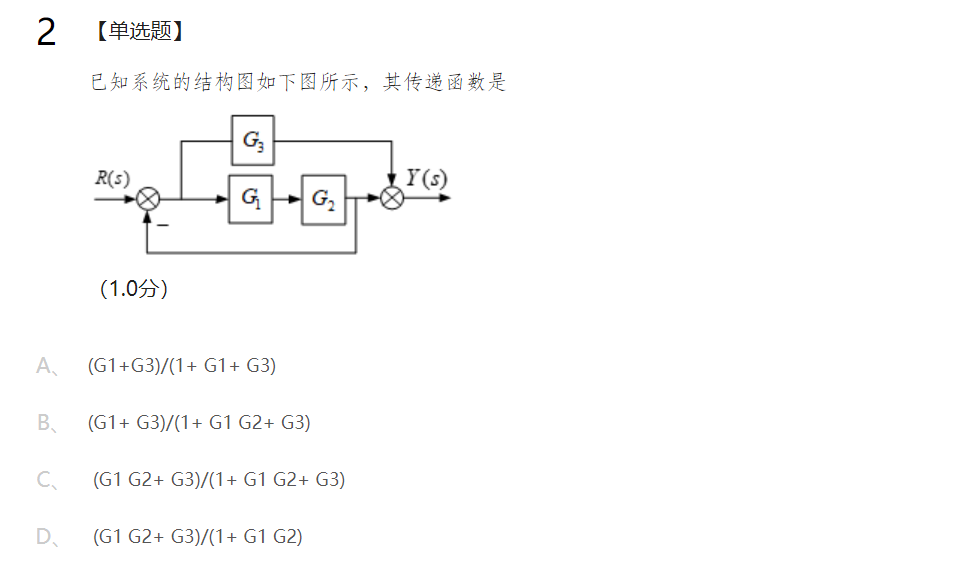
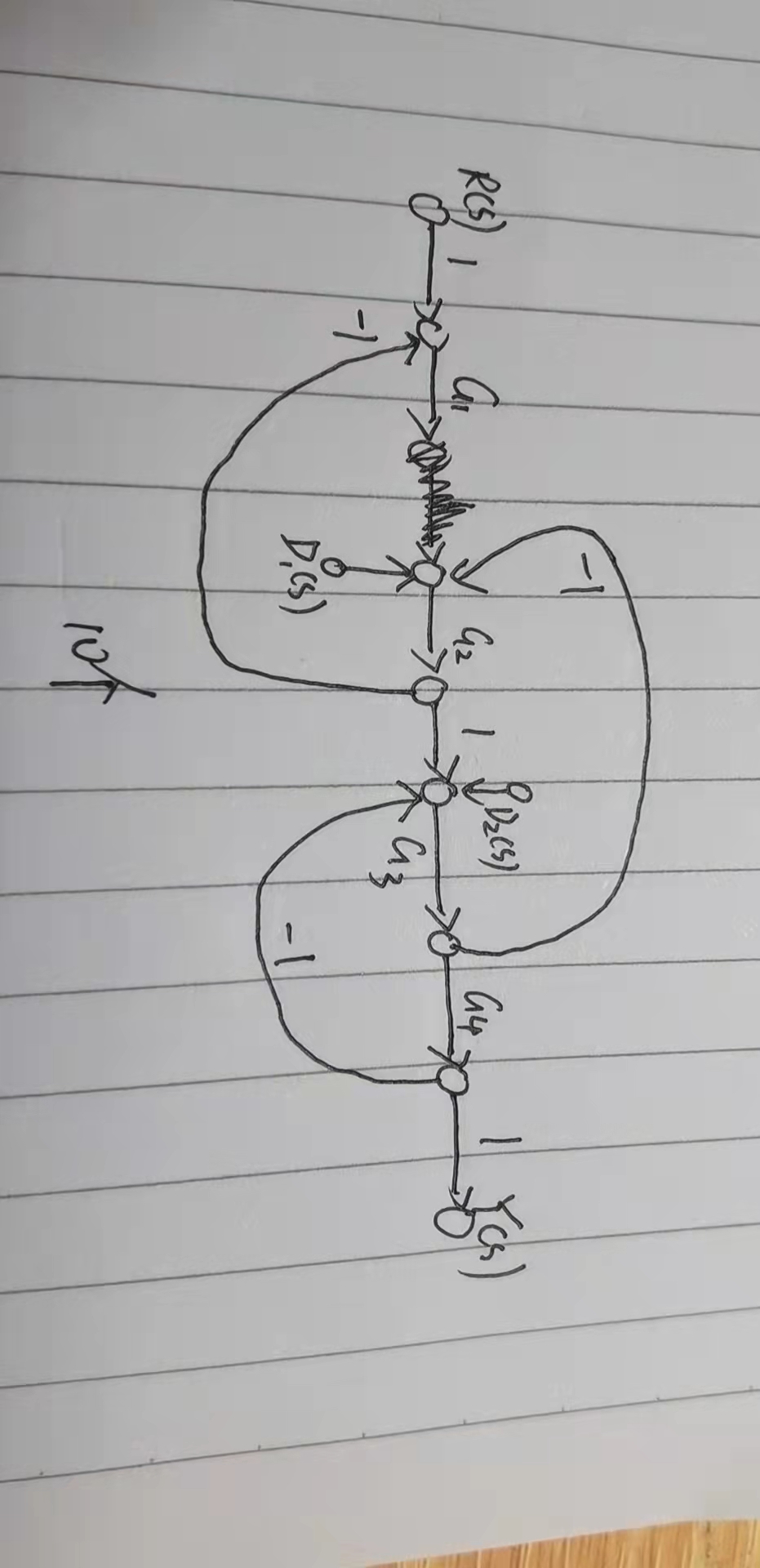
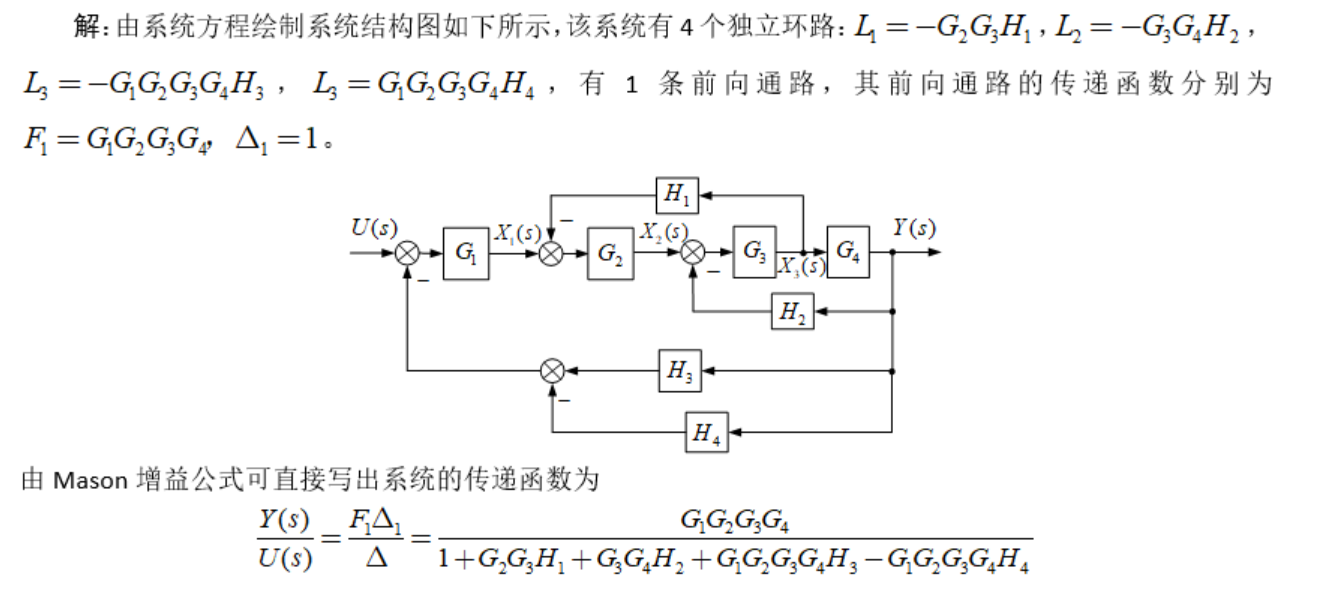
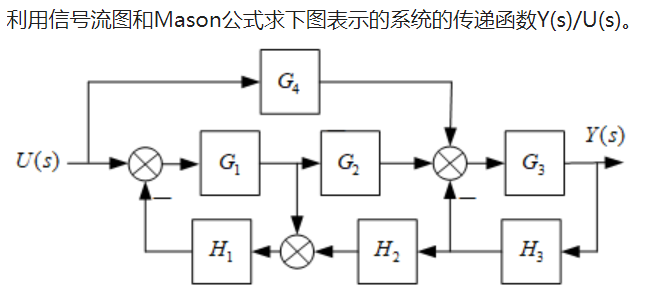
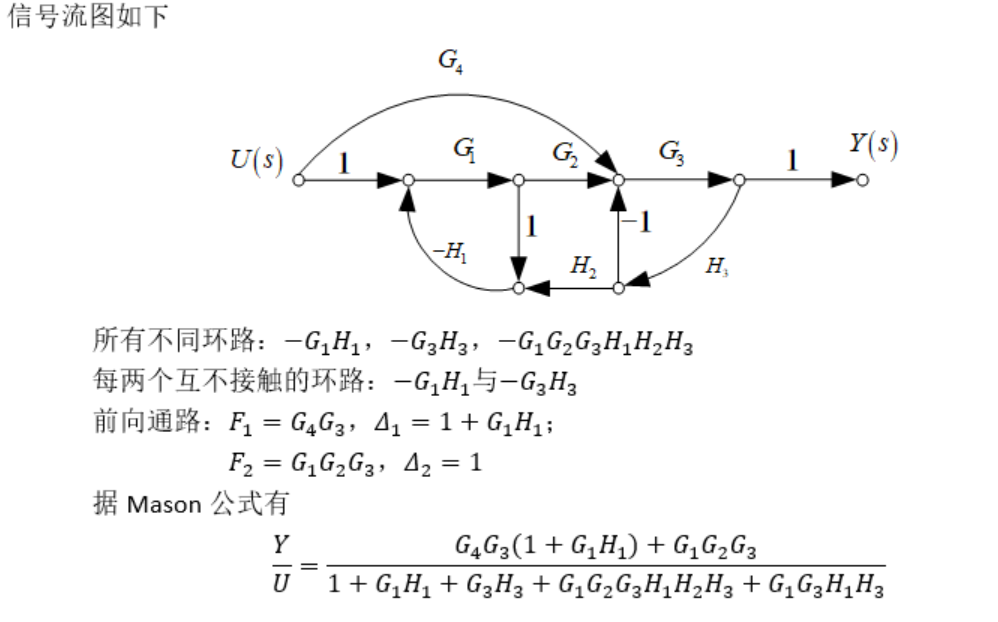
1.5.3 案例
2. 信号流图:
2.1 相关术语:
- 节点:表示系统中的变量或信号的点。节点在图中用一圆圈表示。
- 支路:连接两个具有因果关系节点之间的有向线段。
- 源点:只有输出支路而无输入支路的节点称为源点或输入节点。
- 汇点: 只有输入支路而无输出支路的节点称为汇点或输出节点。
- 混合节点:既有输入支路、又有输出支路的节点称为混合节点,
- 通路:沿支路箭头所指方向、 通过各相连支路的路径(不允许有相反方向支路存在)。
- 开通路:通路与任一节点相交不多于一次。
- 环路:如果通路的终点就是通路的起点,并且与其他任何节点相交不多于一次的闭合路径。
- 前向通路:从源点到输出节点方向的通路上,通过其它任何节点不多于一次的全部通路。
- 支路增益:两个节点之间的因果关系,叫作支路增益,标在相应支路的旁边,实际上它就是两个变量之间的传递函数。
- 环路增益:环路中各支路增益的乘积,也称为回路增益,。
- 前向通路增益:前向通路中各支路增益的乘积。
- 不接触环路:没有任何共同节点的回路,称为不接触环路 。
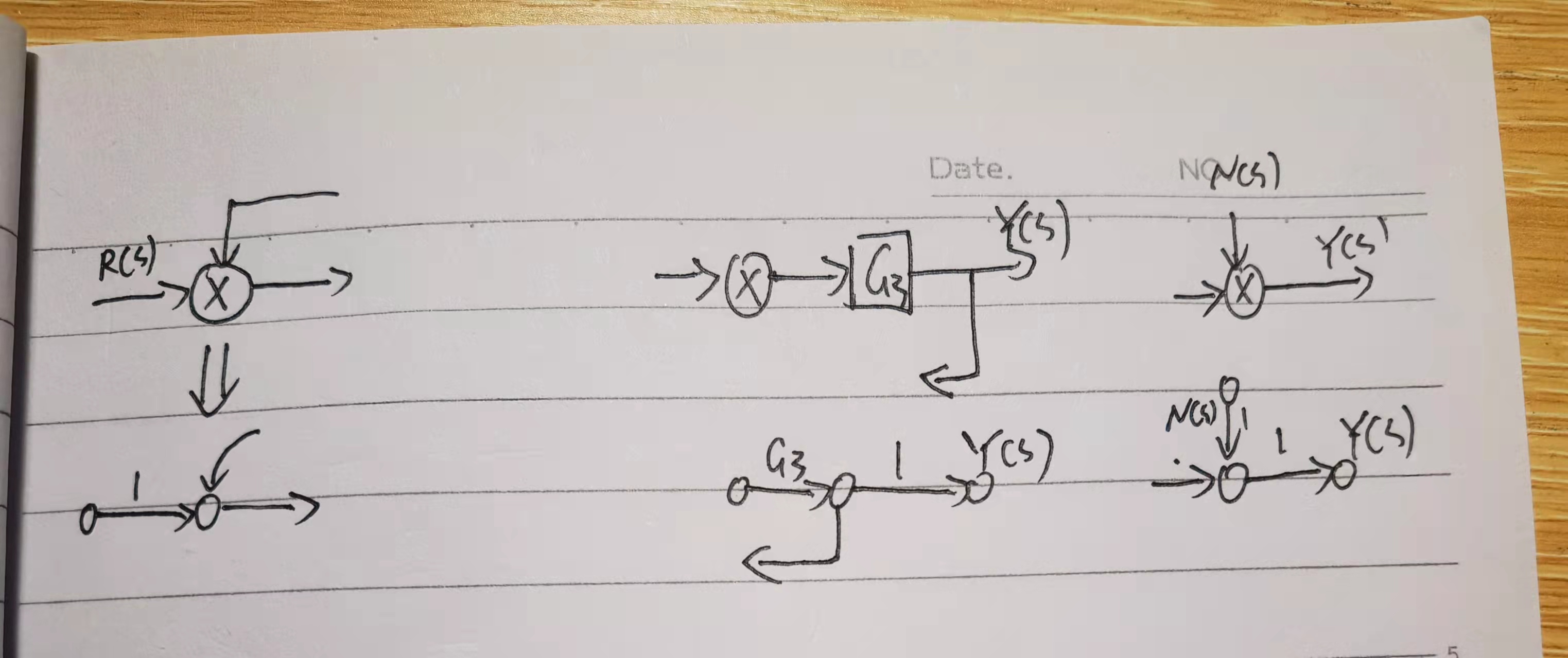
2.2 画法规定:
- 位于综合点前有引出的变量必须通过单位增益表示出来
- 输入端后是混合节点,输出端钱是混合节点,都需要增加单位增益进行表示
2.3 与结构图对应关系
| 结构图 | 信号流图 |
|---|---|
| 输入信号 | 源节点 |
| 输出信号 | 汇点 |
| 比较点、引出点 | 混合节点 |
| 环节 | 支路 |
| 环节传递函数 | 支路增益 |
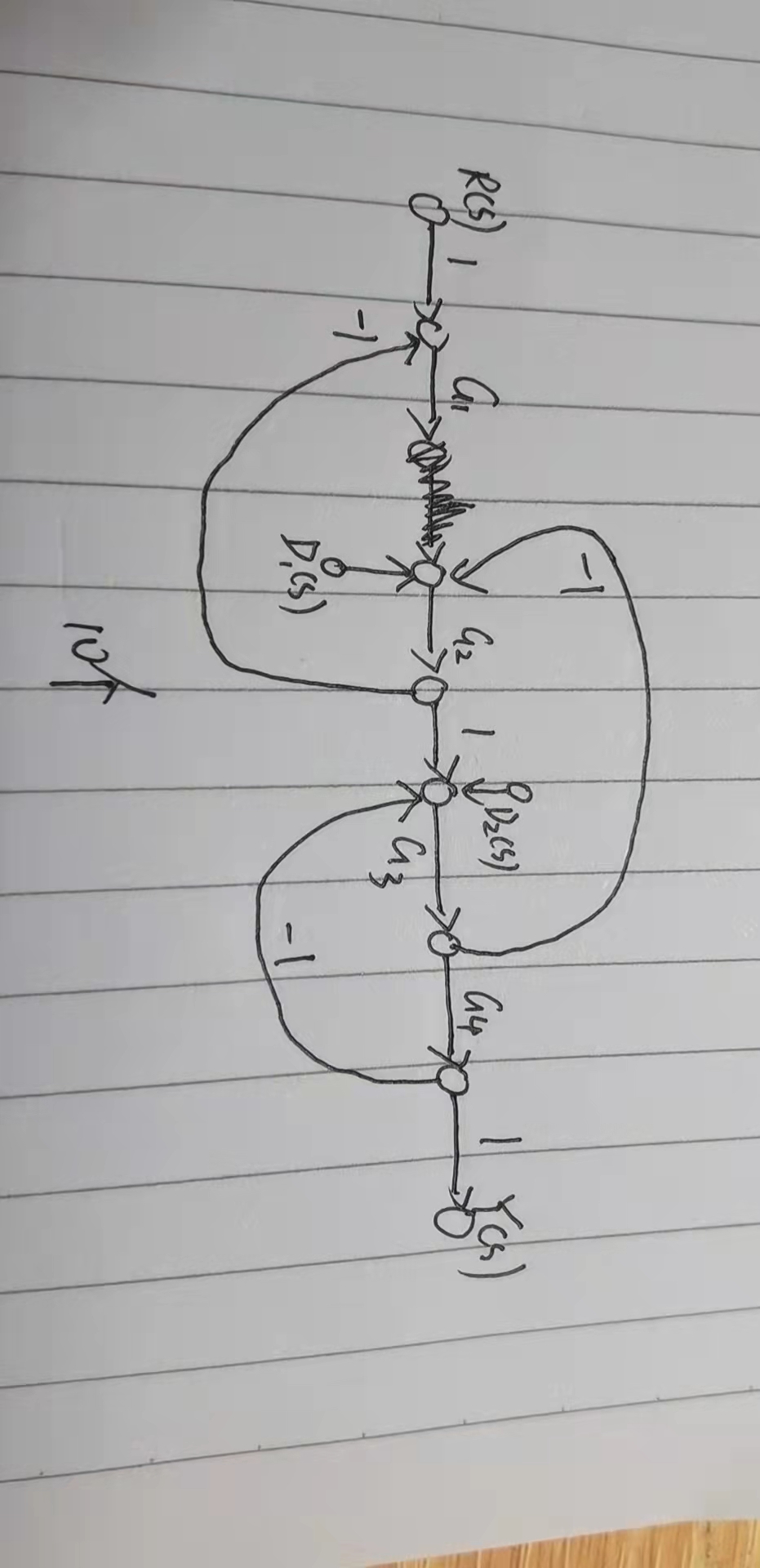
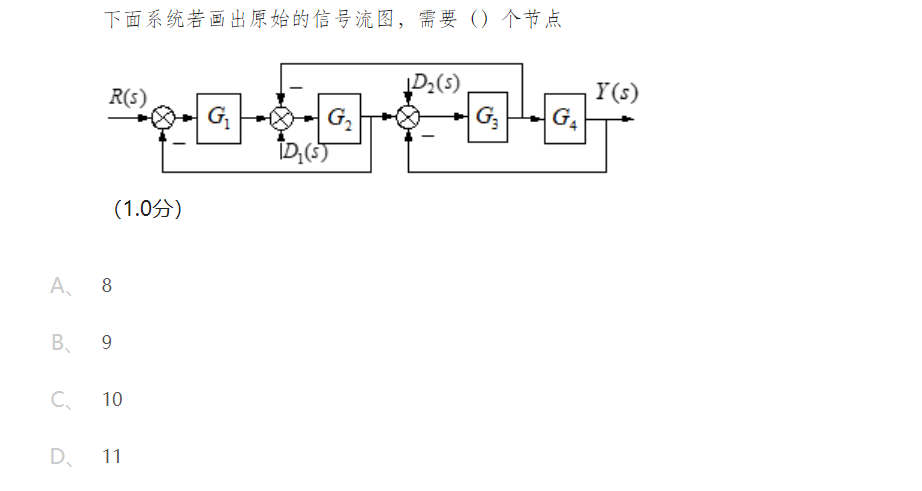
2.4 画法举例
3. Mason公式求解
3.1 Mason公式表达式为:
G = 1 Δ ∑ k = 1 l F k Δ k Δ = 1 − ∑ L i + ∑ L i L j − ∑ L i L j L k + … … − … … G=\frac{1}{\Delta} \sum_{k=1}^{l}F_k\Delta_k \\ \Delta =1-\sum L_i+\sum L_iL_j-\sum L_iL_jL_k+……-…… G=Δ1k=1∑lFkΔkΔ=1−∑Li+∑LiLj−∑LiLjLk+……−……
为信号流图的特征式;其中:
 :所有不同环路的环路增益
:所有不同环路的环路增益
 :每两个互不接触环路的增益乘积之和
:每两个互不接触环路的增益乘积之和
 :每三个互补接触的环路增益乘积之和
:每三个互补接触的环路增益乘积之和
l:从输入节点到输出节点的前向通路数
Fk:源点到输出节点间第k条前向通路的支路增益
 :第k条前向通路的特征余子式
:第k条前向通路的特征余子式
3.2 Mason求解案例
- 见1.5.3题目1


















 2671
2671

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











