







 本文详细介绍了自动控制系统的稳定性分析,包括BIBO稳定、零输入稳定的概念及其条件,以及Routh-Hurwitz、Nyquist等稳定性判据的运用。通过实例展示了如何利用这些判据判断系统稳定性,并探讨了环路分析、非线性系统稳定性和Bode图在稳定性评估中的应用。
本文详细介绍了自动控制系统的稳定性分析,包括BIBO稳定、零输入稳定的概念及其条件,以及Routh-Hurwitz、Nyquist等稳定性判据的运用。通过实例展示了如何利用这些判据判断系统稳定性,并探讨了环路分析、非线性系统稳定性和Bode图在稳定性评估中的应用。
自控原理学习笔记
自控原理学习笔记专栏
第一章——反馈控制系统的动态模型
第二章——控制系统稳定性分析
第三章——连续时间系统性能分析
第四章——自动控制系统校正与综合
第五章——线性离散系统
系统稳定性分析
文章目录
1.输入输出稳定-对于CLTIS
1.1两种稳定状态
1.1.1 BIBO稳定
-
定义:如果一个系统在一个有界输入或扰动作用下其响应是有限的。
-
充要条件:
y ( t ) = ∫ 0 t g ( τ ) u ( t − τ ) d τ ⇒ ∣ y ( t ) ∣ ≤ ∫ 0 t ∣ g ( τ ) ∣ ⋅ ∣ u ( t − τ ) ∣ d τ ≤ M ∫ 0 t ∣ g ( τ ) ∣ d τ y(t)=\int_0^tg(\tau)u(t-\tau)d\tau\Rightarrow |y(t)|\le \int _0^t|g(\tau)|\cdot |u(t-\tau)|d\tau \le M\int_0^t|g(\tau)|d\tau y(t)=∫0tg(τ)u(t−τ)dτ⇒∣y(t)∣≤∫0t∣g(τ)∣⋅∣u(t−τ)∣dτ≤M∫0t∣g(τ)∣dτ
若要使y(t)有界,则充要条件为 ∣ g ( τ ) ∣ |g(\tau)| ∣g(τ)∣绝对可积不可积例子: g ( t ) = 1 t − 1 g(t)=\frac{1}{t-1} g(t)=t−11
-
对于CLTIS,满足BIBO则只有左半平面极点:
假设传递函数是冲激响应的Laplace变换,于是:
G ( s ) = ∫ 0 ∞ g ( t ) e − s t d t ⇒ ∣ G ( s ) ∣ ≤ ∫ 0 ∞ ∣ g ( t ) ∣ ⋅ ∣ e − s t ∣ d t = ∫ 0 ∞ ∣ g ( t ) ∣ ⋅ ∣ e − σ t ∣ d t ⟹ i f σ ≥ 0 , ∣ G ( s ) ∣ ∣ s = σ + i w → ∞ ≤ ∫ 0 ∞ ∣ g ( t ) ∣ ⋅ ∣ e − σ t ∣ d t ≤ ∫ 0 ∞ ∣ g ( t ) ∣ d t G(s)=\int_0^\infty g(t)e^{-st}dt\Rightarrow|G(s)|\le\int_0^\infty |g(t)|\cdot|e^{-st}|dt=\int_0^\infty|g(t)|\cdot|e^{-\sigma t}|dt\\ \Longrightarrow if \quad\sigma \ge 0,\quad |G(s)||_{s=\sigma+iw}\rightarrow\infty\le\int^\infty_0|g(t)|\cdot|e^{-\sigma t}|dt\le\int_0^\infty|g(t)|dt G(s)=∫0∞g(t)e−stdt⇒∣G(s)∣≤∫0∞∣g(t)∣⋅∣e−st∣dt=∫0∞∣g(t)∣⋅∣e−σt∣dt⟹ifσ≥0,∣G(s)∣∣s=σ+iw→∞≤∫0∞∣g(t)∣⋅∣e−σt∣dt≤∫0∞∣g(t)∣dt
∣ g ( t ) ∣ |g(t)| ∣g(t)∣无界,与BIBO稳定矛盾,所有只有当 σ < 0 \sigma<0 σ<0,满足条件。
1.1.2 零输入稳定(渐近稳定)
- 定义:当t趋近于无穷,由初始条件产生的响应趋于0。
- 稳定充分必要条件:
- 对于 ∀ s i , R e ( s i ) < 0 时 , C L T I S 渐 近 稳 定 \forall s_i,Re(s_i)<0时,CLTIS渐近稳定 ∀si,Re(si)<0时,CLTIS渐近稳定
- R e ( s i ) > 0 ∣ ∣ 有重虚根 , C L T I S 不 稳 定 Re(s_i)>0||\text{有重虚根},CLTIS不稳定 Re(si)>0∣∣有重虚根,CLTIS不稳定
- 仅存在单重虚根,其他 R e ( s j ) < 0 Re(s_j)<0 Re(sj)<0,LTIS临界定界。
- 相关例子:
1.1.3 稳定性相关说明
- 对于LTIS,BIBO、零输入稳定都要求特征值均位于复平面左边
- 对于LTIS,稳定性只取决于系统固有性质(特征值),与外界条件无关。
- 稳定性具有一个局部特性(多个稳定点),但只在时变系统和非线性系统体现,时不变系统是全局的。
2. Routh-Hurwitz判据
2.1 CLTIS稳定的必要条件
系统特征方程所有系数大于0
2.2 Routh判据
- 列些Routh表
s n a n a n − 2 a n − 4 … s n − 1 a n − 1 a n − 3 a n − 5 … s n − 2 b 1 b 2 b 3 ⋯ s n − 3 c 1 c 2 … … s 0 h 1 \begin{array}{l} s^{n} \quad a_{n} \quad a_{n-2} \quad a_{n-4} \quad \ldots \\ s^{n-1} \quad a_{n-1} \quad a_{n-3} \quad a_{n-5} \quad \ldots\\ s^{n-2} \quad b_{1} \quad b_{2} \quad b_{3} \cdots \\ s^{n-3} \quad c_{1} \quad c_{2} \quad \ldots \\ \ldots\\ s^{0} \quad h_{1} \end{array} snanan−2an−4…sn−1an−1an−3an−5…sn−2b1b2b3⋯sn−3c1c2……s0h1
- 常规计算
b 1 = − [ a n a n − 2 a n − 1 a n − 3 ] a n − 1 b 2 = − [ a n a n − 4 a n − 1 a n − 5 ] a n − 1 c 1 = − [ a n − 1 a n − 3 b 1 b 2 ] b 1 c 2 = − [ a n − 1 a n − 5 b 1 b 3 ] b 1 b_1=-\frac{ \begin{bmatrix} a_{n}& a_{n-2} \\ a_{n-1}& a_{n-3} \end{bmatrix} } {a_{n-1}} \quad b_2=-\frac{ \begin{bmatrix} a_{n}& a_{n-4} \\ a_{n-1}& a_{n-5} \end{bmatrix} } {a_{n-1}}\\ c_1=-\frac{ \begin{bmatrix} a_{n-1}& a_{n-3} \\ b_1&b_2 \end{bmatrix} } {b_1} \quad c_2=-\frac{ \begin{bmatrix} a_{n-1}& a_{n-5} \\ b_1&b_3 \end{bmatrix} } {b_1} b1=−an−1[anan−1an−2an−3]b2=−an−1[anan−1an−4an−5]c1=−b1[an−1b1an−3b2]c2=−b1[an−1b1an−5b3]
3.判断稳定方法:
第一列系数符号改变次数,就是特征根位于右半s平面的个数
稳定充要条件:表中第一列系数全大于0
-
举例:
假设系统特征方程如下,用Routh判据判别系统稳定性
s 4 + 2 s 3 + 3 s 2 + 4 s + 5 = 0 s^{4}+2 s^{3}+3 s^{2}+4 s+5=0 \\ s4+2s3+3s2+4s+5=0
解:
s 4 1 3 5 s 3 2 4 0 s 2 2 × 3 − 1 × 4 2 = 1 5 0 s 1 1 × 4 − 2 × 5 1 = − 6 0 s 0 5 \begin{array}{c} s^{4} & 1 & 3 & 5 \\ s^{3} & 2 & 4 & 0 \\ s^{2} & \frac{2 \times 3-1 \times 4}{2}=1 & 5 & 0 \\ s^{1} & \frac{1 \times 4-2 \times 5}{1}=-6 & 0 \\ s^{0} & 5 \end{array} s4s3s2s1s01222×3−1×4=111×4−2×5=−653450500
显然第一列符号变化了两次,即在右平面极点数目为2,不稳定
2.3 相关应用
(1)首列系数为0
-
利用小 ϵ \epsilon ϵ法代替零值项,按常规方法继续求解。
-
若第一列全为正数,系统也不是渐近稳定,而是存在纯虚根,临界稳定
(2)某行系数全为0
表明s平面有对称于原点的实根,或共轭虚根 ,
-
取全为0的前一行,以其系数为辅助方程(只取偶次,只存在奇次行)
-
对辅助方程求导,系数代替全为0行
-
继续常规步骤
-
解辅助方程得到对称根
举例说明:
s 6 + 2 s 5 + 6 s 4 + 8 s 3 + 10 s 2 + 4 s + 4 = 0 s 6 16 6 10 4 s 5 2 8 4 s 4 2 8 4 F ( s ) = 2 s 4 + 8 s 2 + 4 s 0 s 3 0 0 F ′ ( s ) = 8 s 3 + 16 s s 3 8 16 s 2 4 4 s 1 8 s 0 4 \begin{array}{l} s^{6}+2 s^{5}+6 s^{4}+8 s^{3}+10 s^{2}+4 s+4=0\\ s^{6} \quad 16 \quad 6 \quad 10 \quad 4\\ s^{5} \quad2 \quad8 \quad4\\ s^{4} \quad2 \quad8 \quad4 & F(s)=2 s^{4}+8 s^{2}+4 s^{0} \\ s^{3} \quad0\quad 0 & {F}'(s)=8s^3+16s\\ s^{3}\quad 8\quad 16\\ s^2\quad 4\quad4\\ s^{1} \quad8\\ s^{0} \quad4 \end{array} s6+2s5+6s4+8s3+10s2+4s+4=0s6166104s5284s4284s300s3816s244s18s04F(s)=2s4+8s2+4s0F′(s)=8s3+16s
(3)相关稳定性问题
利用换元的思想。
如求实部均小于2,则设u=s+2代入方程,将u当作方程变量,进行求解。
2.4 Hurwitz判据
将特征方程系数按如下形式列出。
Δ
n
=
∣
a
n
−
1
a
n
−
3
a
n
−
5
⋯
⋯
0
a
n
a
n
−
2
a
n
−
4
⋯
⋯
⋮
0
a
n
−
1
a
n
−
3
⋯
⋯
⋮
0
a
n
a
n
−
2
⋯
⋯
⋮
⋯
⋯
⋯
⋯
…
⋮
⋯
⋯
⋯
⋯
a
1
0
⋯
⋯
⋯
⋯
a
2
a
0
∣
\Delta_{n}=\left|\begin{array}{cccccc} a_{n-1} & a_{n-3} & a_{n-5} & \cdots & \cdots & 0 \\ a_{n} & a_{n-2} & a_{n-4} & \cdots & \cdots & \vdots \\ 0 & a_{n-1} & a_{n-3} & \cdots & \cdots & \vdots \\ 0 & a_{n} & a_{n-2} & \cdots & \cdots & \vdots \\ \cdots & \cdots & \cdots & \cdots & \ldots & \vdots \\ \cdots & \cdots & \cdots & \cdots & a_{1} & 0 \\ \cdots & \cdots & \cdots & \cdots & a_{2} & a_{0} \end{array}\right|
Δn=∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣an−1an00⋯⋯⋯an−3an−2an−1an⋯⋯⋯an−5an−4an−3an−2⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯…a1a20⋮⋮⋮⋮0a0∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
系统稳定的条件是系统行列式各阶主子式大于0
Δ
1
=
a
n
−
1
>
0
,
Δ
2
=
∣
a
n
−
1
a
n
−
3
a
n
a
n
−
2
∣
>
0
,
Δ
3
=
∣
a
n
−
1
a
n
−
3
a
n
−
5
a
n
a
n
−
2
a
n
−
4
0
a
n
−
1
a
n
−
3
∣
>
0
,
⋯
,
Δ
n
>
0
\Delta_{1}=a_{n-1}>0, \Delta_{2}=\left|\begin{array}{cc} a_{n-1} & a_{n-3} \\ a_{n} & a_{n-2} \end{array}\right|>0, \Delta_{3}=\left|\begin{array}{ccc} a_{n-1} & a_{n-3} & a_{n-5} \\ a_{n} & a_{n-2} & a_{n-4} \\ 0 & a_{n-1} & a_{n-3} \end{array}\right|>0, \cdots, \Delta_{n}>0
Δ1=an−1>0,Δ2=∣∣∣∣an−1anan−3an−2∣∣∣∣>0,Δ3=∣∣∣∣∣∣an−1an0an−3an−2an−1an−5an−4an−3∣∣∣∣∣∣>0,⋯,Δn>0
3. 环路分析
3.1环路分析基本思想
-
不同频率正弦信号在线性系统中的传输,输出被放大、缩小还是自持振荡完全取决于频率特性。
-
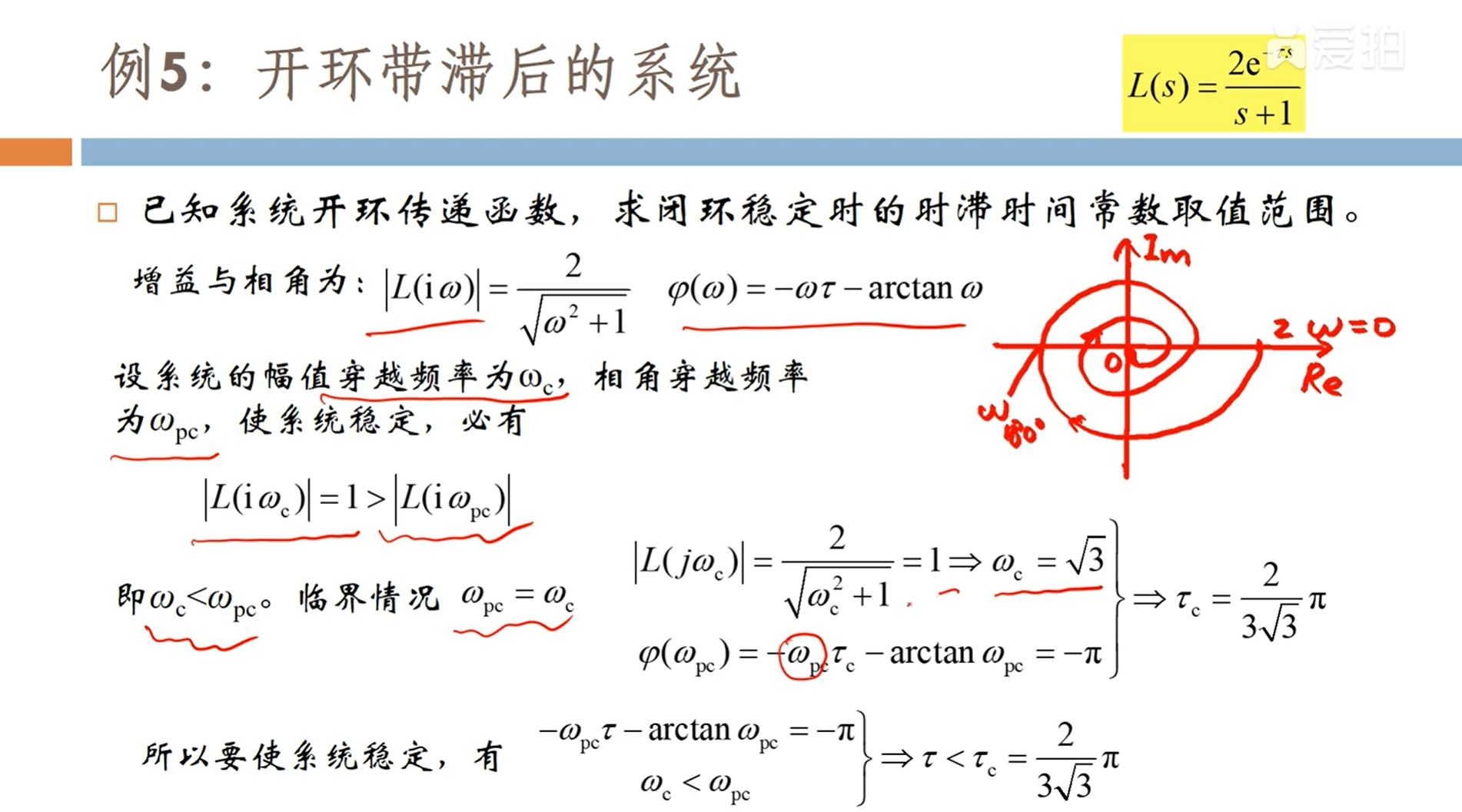
记(-1,i0)为临界点。相角交越频率为当相角为-180°时的频率,此时若幅值为1则为自激条件。
-
简化Nyquist判据:
如果 ∣ L ( i w p c ) > 1 ∣ |L(iw_{pc})>1| ∣L(iwpc)>1∣,环路上 w p c w_{pc} wpc信号被放大,闭环系统不稳定。
如过 ∣ L ( i w p c ) < 1 ∣ |L(iw_{pc})<1| ∣L(iwpc)<1∣,环路上 w p c w_{pc} wpc信号被衰减,闭环系统稳定。
3.2 稳定程度的性能指标(相对稳定)
-
增益裕度
g m = 1 ∣ L ( i w p c ) ∣ 要求: g m ≥ 2 g_m=\frac{1}{|L(iw_{pc})|} \\ \text{要求:}\quad g_m \ge 2 gm=∣L(iwpc)∣1要求:gm≥2

-
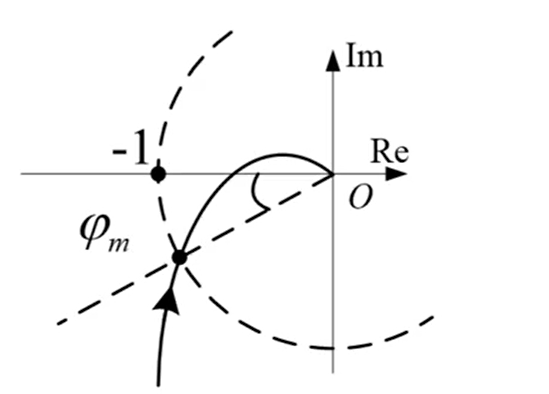
相角裕度
φ m = 180 ° + ∠ L ( i w c ) φ m = 30 ° ∼ 60 ° \varphi_m = 180\degree +\angle L(iw_c) \\ \varphi_m = 30\degree \sim 60\degree φm=180°+∠L(iwc)φm=30°∼60°
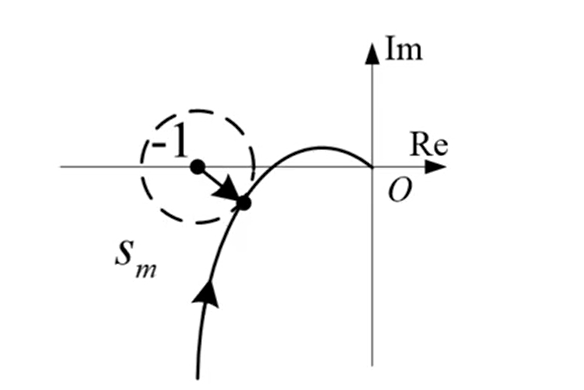
- 模裕度(当有谐振需要考虑模裕度)
s m = m i n w ∣ L ( i w ) + 1 ∣ = 1 m a x w ∣ S ( i w ) ∣ = 1 M s s_m = \underset{w}{min}|L(iw)+1|=\frac{1}{\underset{w}{max}|S(iw)|}=\frac{1}{M_s} sm=wmin∣L(iw)+1∣=wmax∣S(iw)∣1=Ms1
3.3 环路整形
- 对于开环稳定、闭环不稳定的系统,通过降低开环增益可以避开临界点,使系统闭环稳定
- 通过控制器给系统引入开环零极点,改变频率特性的形状,绕开临界点。
4.Nyquist判据
4.1 与幅角原理关系
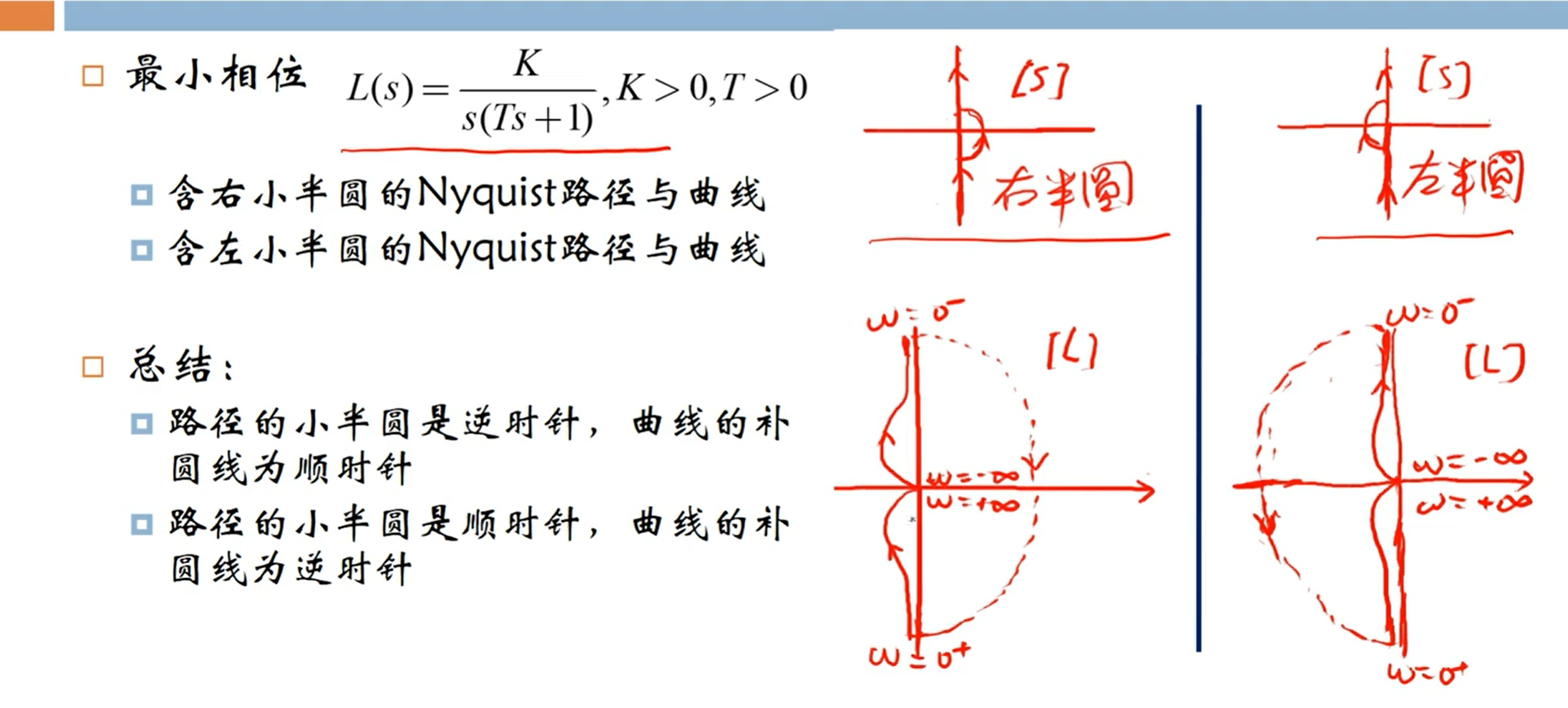
4.2 补圆
4.3判别方法
设开环传递函数 L ( s ) L(s) L(s)右半复平面的极点数为P,
-
Nyquist曲线顺时针围绕(-1,i0)圈数为 w n w_n wn,则闭环系统在右半复平面的极点数为 N = w n + P N=w_n+P N=wn+P
-
闭环系统稳定的充要条件是N=0,即Nyquist曲线围绕(-1,i0)的逆时针圈数为P
-
相关说明:L(s)若具有RHP极点,闭环系统稳定必要条件 ∣ L ( i w p c ) ∣ > 1 |L(iw_{pc})|>1 ∣L(iwpc)∣>1,即必须要绕(-1,i0)。
4.4 相关例子
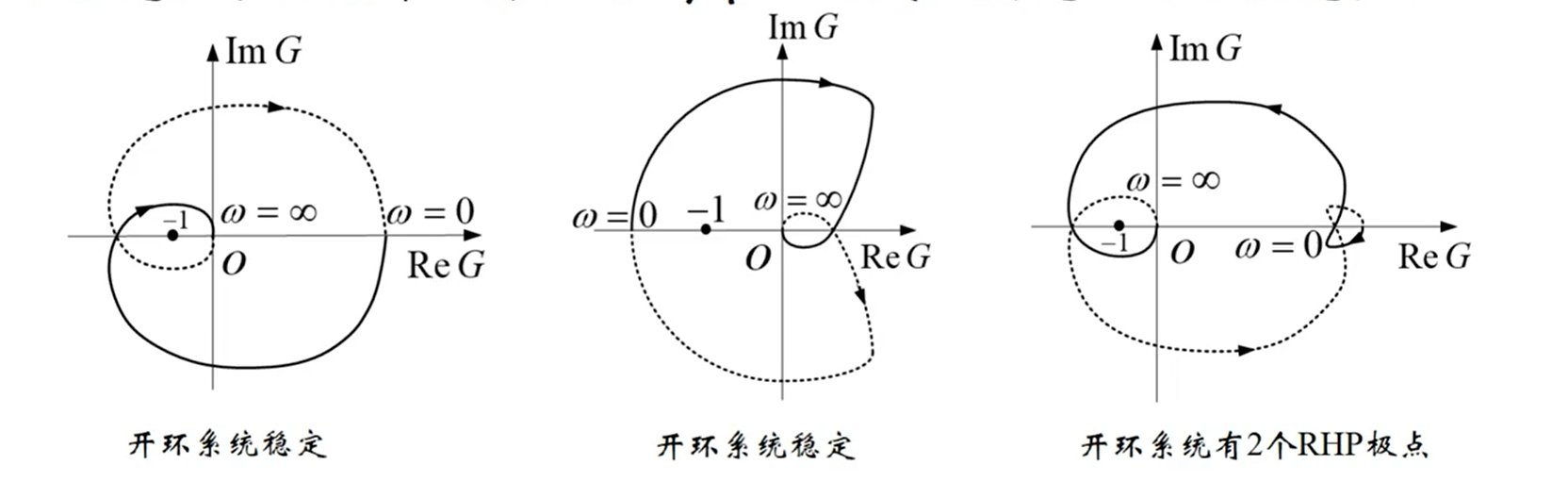
| 开环极点数 | 0 | 0 | 2 |
|---|---|---|---|
| 顺时针围绕圈数 | 1 | 1 | -2 |
| 闭环极点 | 0稳定 | 0稳定 | 0稳定 |
- n个积分环节补圆 N π N\pi Nπ
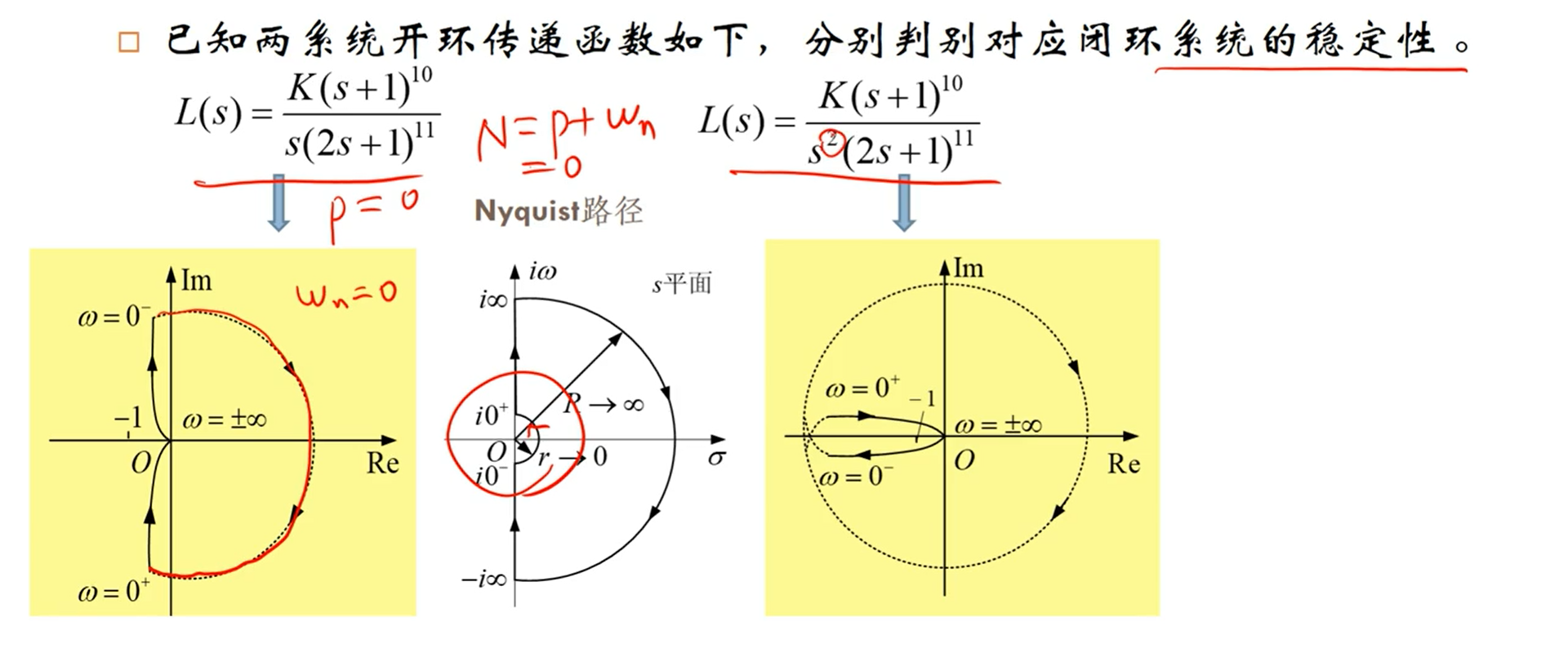
系统增加开环极点,即将系统相角变大,使之不用穿越至第二象限,从而达到使 w n = 0 w_n=0 wn=0.
5.非线性系统稳定性及自振分析
5.1 用描述函数分析的条件
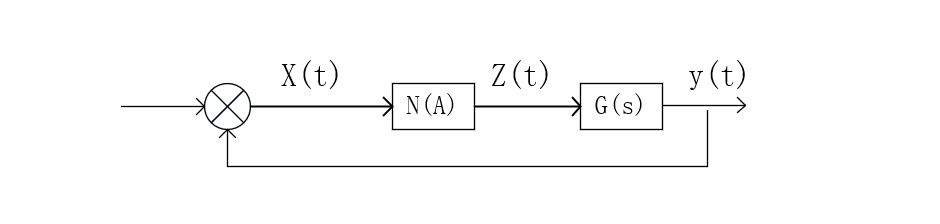
- 非线性控制系统结构图一般能简化成如上图所示最简形式。
- 非线性环节的输入输出特性是奇对称的,保证非线性在正弦作用下不含常值分量。
3. 非线性系统具有良好的低通滤波特性。
5.2稳定性判据
- 闭环系统近似频率特性
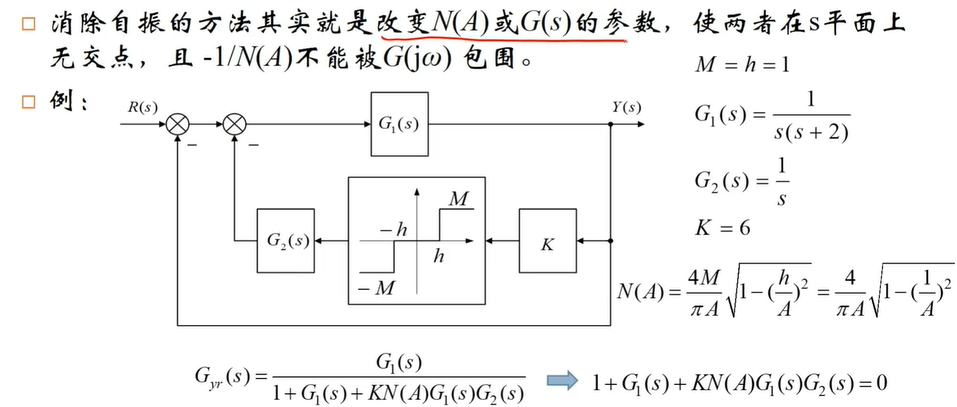
Φ ( i w ) = N ( A ) G ( i w ) 1 + N ( A ) G ( i w ) \Phi(iw)=\frac{N(A)G(iw)}{1+N(A)G(iw)} Φ(iw)=1+N(A)G(iw)N(A)G(iw)
-
闭环系统的特征方程为:
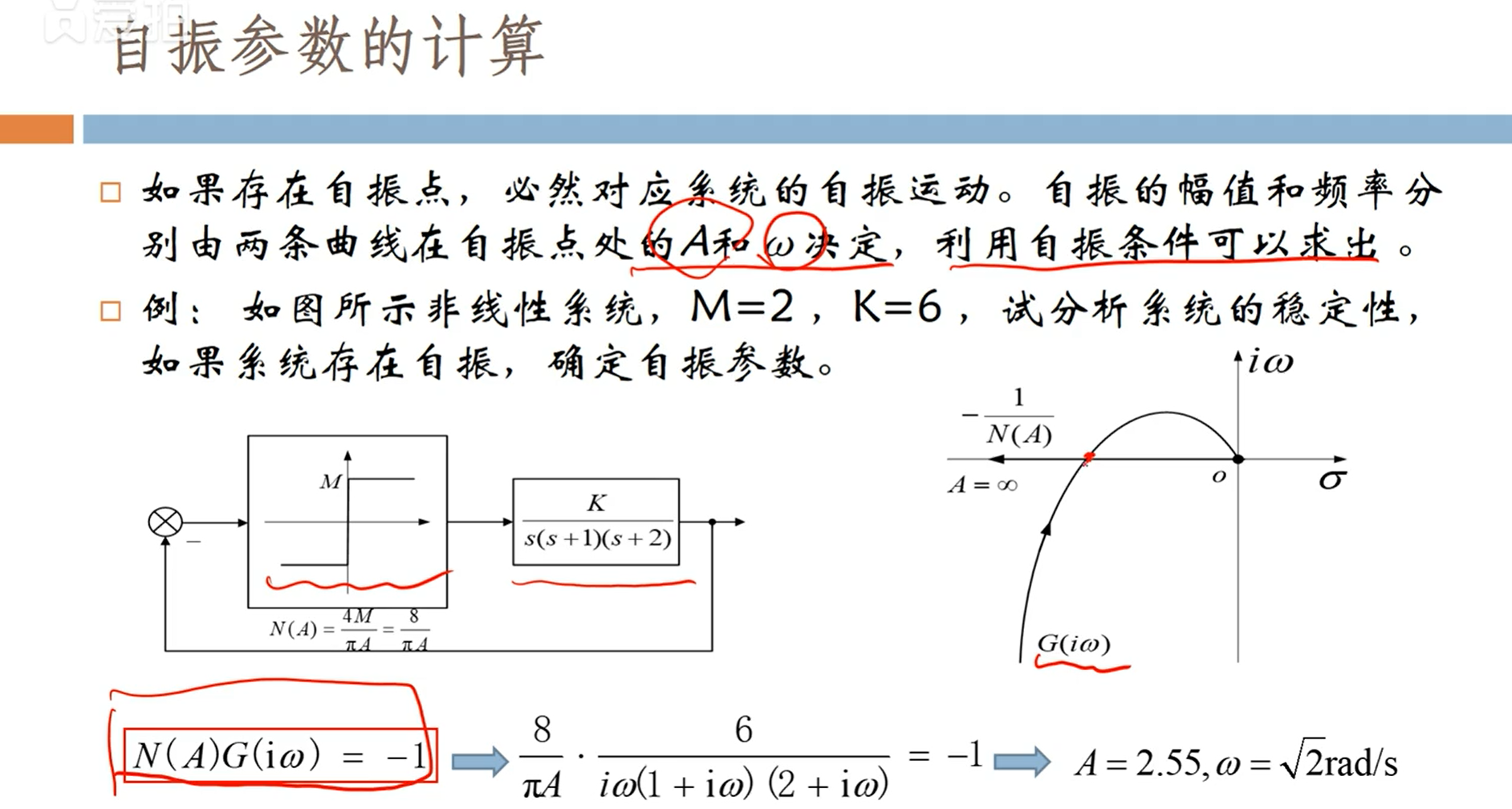
1 + N ( A ) G ( i w ) = 0 ⟹ G ( i w ) = − 1 N ( A ) 1+N(A)G(iw)=0 \Longrightarrow G(iw)=-\frac{1}{N(A)} 1+N(A)G(iw)=0⟹G(iw)=−N(A)1 -
判据:
在复平面上分别画出 − 1 N ( A ) -\frac{1}{N(A)} −N(A)1和 G ( i w ) G(iw) G(iw),根据两者包围情况可判别稳定性(类比Nyquist判据)————临界点-1变成了临界线 − 1 N ( A ) -\frac{1}{N(A)} −N(A)1
(1)若两条曲线没有交点,则非线性系统稳定
(2)若存在交点,则非线性系统不稳定————由不稳定区域 G ( i w ) G(iw) G(iw)包围区域进入稳定区域 − 1 N ( A ) -\frac{1}{N(A)} −N(A)1的交点 为自振点,另外一个则为不稳定周期运动的点。
5.2 自振必要条件
负倒曲线
–
1
N
(
A
)
–\frac{1}{N(A)}
–N(A)1与
G
(
i
w
)
G(iw)
G(iw)有交点。在交点处于临界稳定状态,满足
N
(
A
)
∗
G
(
i
w
)
=
−
1
N(A)*G(iw)=-1
N(A)∗G(iw)=−1即:
{
∣
N
(
A
)
∣
⋅
∣
G
(
i
w
)
∣
=
1
∠
N
(
A
)
+
∠
G
(
i
w
)
=
−
180
°
\left\{\begin{matrix} |N(A)|\cdot|G(iw)|=1 \\ \angle N(A)+\angle G(iw)=-180\degree \end{matrix}\right.
{∣N(A)∣⋅∣G(iw)∣=1∠N(A)+∠G(iw)=−180°
- 自振参数计算
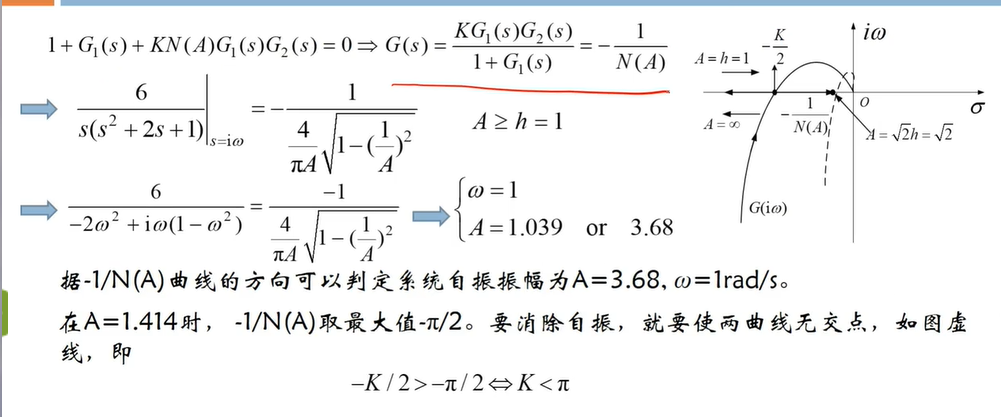
2.消除自振方法:
改变N(A)或G(s)的参数,使两者在s平面上无交点,且 − 1 N ( A ) -\frac{1}{N(A)} −N(A)1不能被 G ( i w ) G(iw) G(iw)包围.

6.Bode图稳定性分析
6.1 与Nyquist对应关系
| Nyquist图 | Bode图 |
|---|---|
| 单位圆 | 幅相曲线0dB线 |
| 单位圆外部和内部 | 幅相曲线上侧和下侧 |
| 负实轴 | 相角为-180度曲线 |
| w p c 和 w c w_{pc}和w_c wpc和wc对应关系如下 | w p c 和 w c w_{pc}和w_c wpc和wc对应关系如下 |
| 积分环节nyquist补圆 ν π \nu\pi νπ | 相频曲线向上补 ν π 2 \nu\frac{\pi}{2} ν2π |
| 等幅振荡 1 ( s 2 + w n 2 ) 2 \frac{1}{(s^2+w_n^2)^2} (s2+wn2)21,幅相半闭合曲线(Nyquist的一半)需要补 ν π \nu \pi νπ从 w n − 到 w n + w_n^-到w_n^+ wn−到wn+ | 相频向下补 ν π \nu \pi νπ |
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-fBqUdDHq-1650620199337)(../../图片/image-20220401165148485 .png)]](https://i-blog.csdnimg.cn/blog_migrate/65f208f5a8808e5f1f0e8e289111cc74.png)
6.2 相频特性-穿越次数
限定:正负穿越讨论一定要在穿越频率以内
Bode图的相频曲线图从-180度以下穿越至-180度以上为正穿越,反之为负穿越。
Bode图若从-180度线往上出发,为半次正穿越,记 C + = 0.5 C^+=0.5 C+=0.5
6.3 计算相关裕度
| 相关裕度 | 求解公式 |
|---|---|
| 幅值裕度 | $G_m=20\lg{g_m}=0-20\lg |
| 相角裕度 | φ m = 180 ° + ∠ L ( i w c ) \varphi_m=180\degree+\angle L(iw_c) φm=180°+∠L(iwc) |
| 模裕度 | $l_m=20\lg s_m=20\lg |
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Dfxvl77y-1650620409587)(https://gitee.com/Miracle_Fan/figure-beds/raw/master/img/image-20220401165128894.png#pic_center)]](https://i-blog.csdnimg.cn/blog_migrate/fde1b6b1f18285f49649a9a091d3c56d.png)
7.计算稳定性步骤
- 计算
w
p
c
w_{pc}
wpc:利用各个环节贡献相角量进行计算,避免使用将iw代入开环传递函数进行化简。
判 定 如 下 系 统 是 否 闭 环 稳 定 , 已 知 单 位 负 反 馈 系 统 的 开 环 传 递 函 数 如 下 ( 所 有 的 T i > 0 ) , 并 给 依 据 。 L ( s ) = 1 ( T 1 s + 1 ) ( T 2 s + 1 ) ( T 3 s + 1 ) ( T 4 s + 1 ) ( T 5 s + 1 ) ( T 6 s + 1 ) 判定如下系统是否闭环稳定,已知单位负反馈系统的开环传递函数如下(所有的T_i>0),并给依据。\\ L(s)=\frac{1}{\left(T_{1} s+1\right)\left(T_{2} s+1\right)\left(T_{3} s+1\right)\left(T_{4} s+1\right)\left(T_{5} s+1\right)\left(T_{6} s+1\right)} 判定如下系统是否闭环稳定,已知单位负反馈系统的开环传递函数如下(所有的Ti>0),并给依据。L(s)=(T1s+1)(T2s+1)(T3s+1)(T4s+1)(T5s+1)(T6s+1)1
解 : ∠ L ( i p p c ) = arctan T 1 ω p c − arctan T 2 ω p c ⋯ arctan T 6 ω p c = − 180 令 w p c = w x L ( i w p c ) = 1 ( T 1 w x ) 2 + 1 ⋯ ⋯ ( T 6 w x ) 2 + 1 ≤ 1 只有当 ω x = 0 ∣ L ( i w p c ) ∣ = 1 而L(s)起点为(1,i0) L ( s ) 所以系统没有围绕(-1,i0),即系统没有RHP极点,闭环系统稳定 \begin{array}{c} 解:\angle L\left(\text { i } p_{p c}\right)=\arctan T_{1} \omega_{p c}-\arctan T_{2} \omega_{p c} \cdots \arctan T_{6} \omega_{p c}=-180\\ 令w_{p c}=w_{x}\\ L(iw_{pc}) =\frac{1}{\sqrt{\left(T_{1} w_{x}\right)^{2}+1} \cdots \cdots \sqrt{\left(T_{6} w_{x}\right)^{2}+1}} \le 1\\ \text { 只有当 }\omega_{x}=0 \quad|L (iw_{pc})|=1\\ \text { 而L(s)起点为(1,i0)} L(s) \\ \text{所以系统没有围绕(-1,i0),即系统没有RHP极点,闭环系统稳定} \end{array} 解:∠L( i ppc)=arctanT1ωpc−arctanT2ωpc⋯arctanT6ωpc=−180令wpc=wxL(iwpc)=(T1wx)2+1⋯⋯(T6wx)2+11≤1 只有当 ωx=0∣L(iwpc)∣=1 而L(s)起点为(1,i0)L(s)所以系统没有围绕(-1,i0),即系统没有RHP极点,闭环系统稳定


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











