







摄像头
USB摄像头是最普遍的摄像头,如笔记本内置的摄像头,在ROS中使用这类设备很简单,可以直接使用usb_cam功能包驱动,USB摄像头输出的是二维图像数据。
usb_cam是针对V4L协议USB摄像头的ROS驱动包,核心节点是usb_cam_nod
1、使用PC内置摄像头
安装usb_cam功能包
$ sudo apt-get install ros-melodic-usb-cam
运行
$ roslaunch usb_cam usb_cam-test.launch
报错:
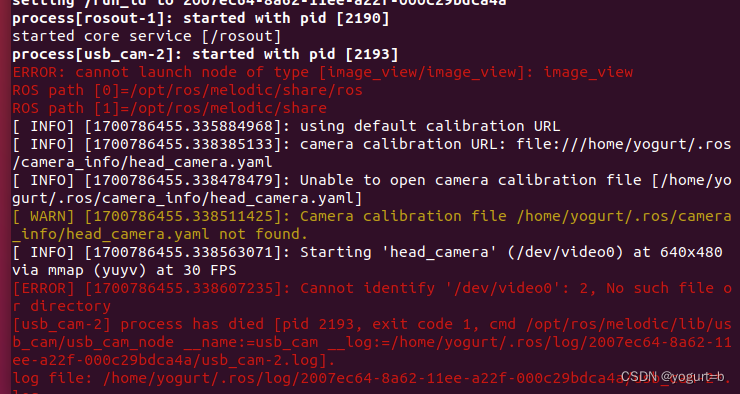
ERROR: cannot launch node of type [image_view/image_view]: image_view
安装image-view
sudo apt-get install ros-kinetic-image-view
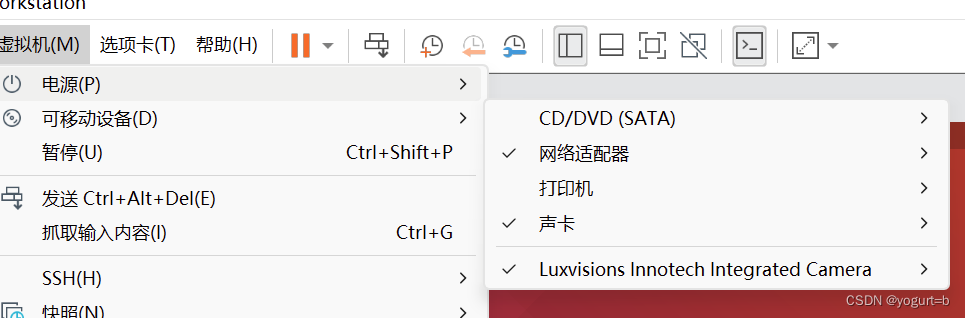
ERROR: Cannot identify ‘/dev/video0’: 2, No such file or directory
是因为虚拟机连接不上主机的摄像头
解决:
https://blog.csdn.net/qq_54253413/article/details/128599092
再次运行
$ roslaunch usb_cam usb_cam-test.launch
可以成功调用本地摄像头
2、调用外部USB摄像头
usb_cam安装,在工作空间中采用源代码安装:
$ cd catkin_ws/src
$ git clone https://github.com/bosch-ros-pkg/usb_cam.git
$ cd ..
$ catkin_make
报错:
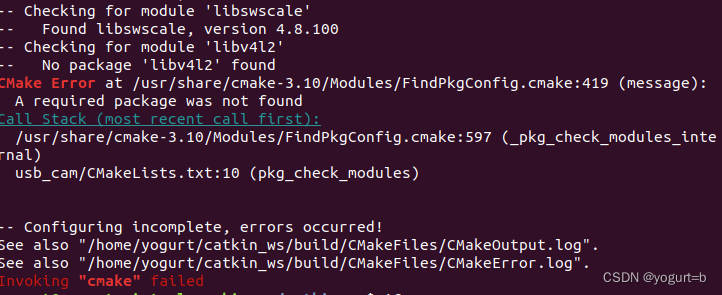
问题:- No package ‘libv4l2’ found
解决:
sudo apt-get install libv4l-dev
进入下载的包,找到usb_cam-test.launch或robot_vision中usb_cam.launch文件,修改里面的内容video0改成video1,保存并退出,source一下。
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video1" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">
<remap from="image" to="/usb_cam/image_raw" />
<param name="autosize" value="true" />
</node>
</launch>
source devel/setup.bash
然后执行:
roslaunch usb_cam usb_cam-test.launch #开启摄像头
或
roslaunch robot_vision usb_cam.launch
OpenCV库
OpenCV库是一个基于BSD许可发行的跨平台开源计算机库,可以运行在Linux、Windows和mac OS等操作系统上。OpenCV由一系列C函数和少量C++类构成,同时提供C++、Python、Ruby、Matlab等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法。
ROS开发者提供了与OpenCV的接口功能包——cv_bridge。如下图所示,开发者可以通过该功能包将ROS中的图像数据转换成OpenCV格式的图像,并且调用OpenCV库进行各种图像处理;或者将OpenCV处理过后的数据转换成ROS图像,通过话题发布,实现各节点之间的图像传输。

ROS中已经集成了OpenCV库和相关的接口功能包,使用如下命令即可安装:
sudo apt-get install ros-melodic-vision-opencv libopencv-dev python-opencv
或在catkin_ws/src目录下下载robot_vision安装包
git clone https://github.com/1417265678/robot_vision.git
cd ..
catkin_make
测试cv_bridge_test样例
$ roslaunch robot_vision usb_cam.launch
重新开启终端
$ catkin_make
$ source ./devel/setup.bash
$ rosrun robot_vision cv_bridge_test.py
再开启一个终端
$ rqt_image_view
没有的话就安装一下
sudo apt-get install ros-melodic-rqt-image-view
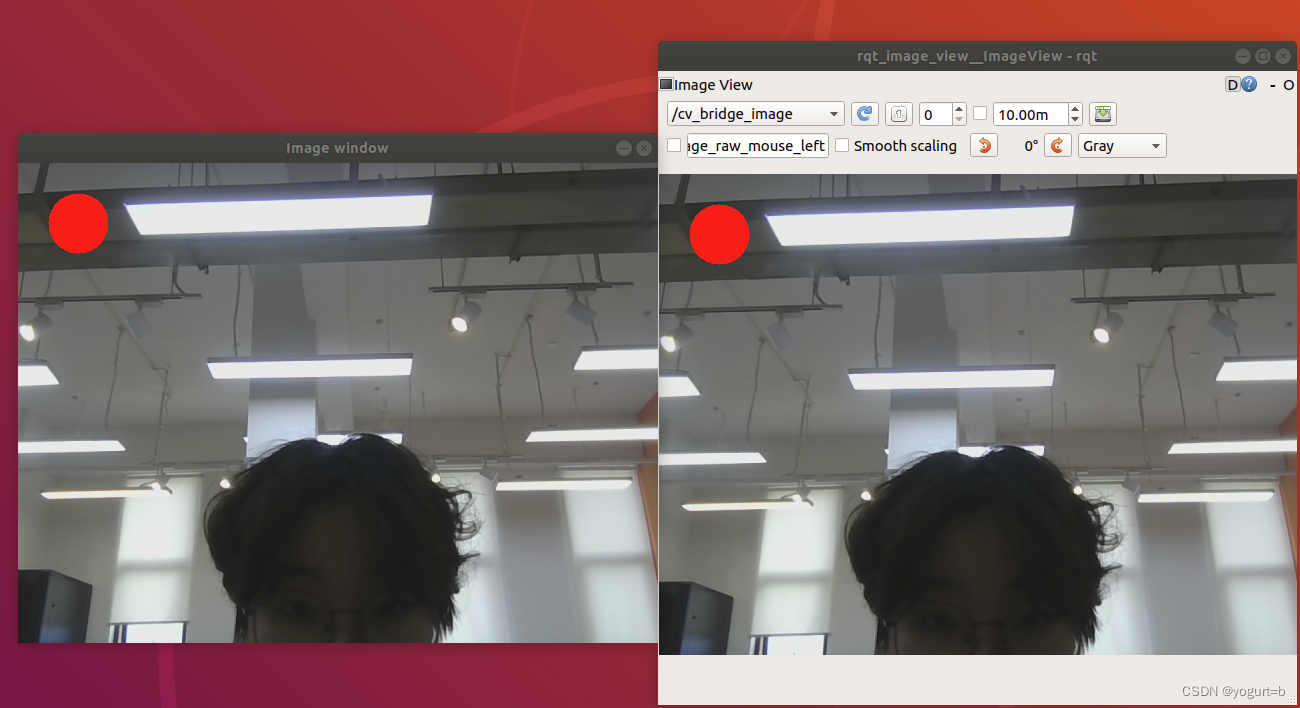
该例程中,一个ROS节点订阅摄像头驱动发布的图像消息,然后将其转换成OpenCV的图像格式进行显示,然后再将该OpenCV格式的图像转换成ROS图像消息进行发布并显示。
运行效果如下图所示,图像左边是通过cv_bridge将ROS图像转换成OpenCV图像数据之后的显示效果,使用OpenCV库在图像的左上角绘制了一个红色的圆;图像右边是将OpenCV图像数据再次通过cv_bridge转换成ROS图像后的显示效果,左右两幅图像背景应该完全一致。
巡线代码
新建scout_control_demo2.cpp,设置成可执行文件
- 代码
#include <ros/ros.h>
#include <geometry_msgs/TwistStamped.h>
#include <nav_msgs/Odometry.h>
#include <sensor_msgs/Image.h>
#include <tf/transform_datatypes.h>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/opencv.hpp>
#include <image_transport/image_transport.h>
#include <opencv2/highgui/highgui.hpp>
//速度控制话题消息类型类型
geometry_msgs::TwistStamped cmd_speed;
//
cv_bridge::CvImagePtr cv_ptr;
//小车x,y方向速度
double linear_x;
double linear_y;
// th
//转速
double angular_z;
void imageCallback(const sensor_msgs::ImageConstPtr& msg)
{
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "scout_control_demo2");
ros::NodeHandle n;
// 发布话题 "/cmd_vel_raw"
ros::Publisher pub = n.advertise<geometry_msgs::TwistStamped>("/cmd_vel_raw", 5);
// 订阅话题
ros::Subscriber image_sub_ = n.subscribe("/usb_cam/image_raw", 1, imageCallback);
//配合r.sleep控制循环频率
ros::Rate r(50);
// 设置底盘运动速度,初始前进
linear_x = 0.0;
angular_z = 0.0;
linear_y = 0.0;
// 运动状态标识符
int tag = 0;
while(ros::ok())
{
cmd_speed.twist.linear.x = linear_x;
cmd_speed.twist.linear.y = linear_y;
// th
cmd_speed.twist.angular.z = angular_z;
cv::Mat image = cv_ptr -> image;
cv::Mat hsv = image.clone();
cv::Mat res = image.clone();
cv::cvtColor(image, hsv, cv::COLOR_BGR2HSV);
//取颜色
cv::inRange(hsv, cv::Scalar(0, 0, 20), cv::Scalar(180, 255, 150), res);
int h = image.rows;
int w = image.cols;
cv::Moments M = cv::moments(res);
if(M.m00 > 0){
int cx = int (cvRound(M.m10 / M.m00));
int cy = int (cvRound(M.m01 / M.m00));
ROS_INFO("cx: %d cy: %d", cx, cy);
cv::circle(cv_ptr->image, cv::Point(cx, cy), 20, (0, 255, 0));
int v = cx - w / 2;
linear_x = 0.1;
angular_z = -float(v) / 300 * 0.3;
//?
//image_pub_.publish(cv_ptr->toImageMsg());
pub.publish(cmd_speed);
ROS_INFO("linearx: %F,angularz: %F",linear_x,angular_z);
}
else{
ROS_INFO("not found line!");
linear_x =0;
angular_z =0.2;
pub.publish(cmd_speed);
}
//当处理到ros::spinonce()时,会去话题订阅缓冲区中查看有没有回调函数,如果有则去处理回调函数,如果没有则继续往下执行
ros::spinOnce();
r.sleep();
}
return 0;
}
- cv::inRange() 函数在 OpenCV 中用于确定图像中像素值在指定范围内的区域,并将这些像素标记为白色(255),其他像素标记为黑色(0),结果存储在 res 中。
- 编译日常出错及解决

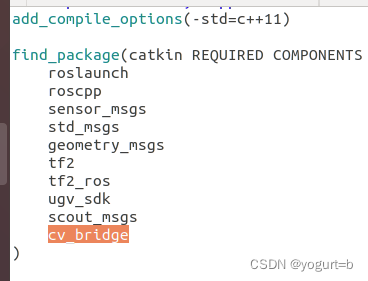
CMakeList
链接Opencv库文件

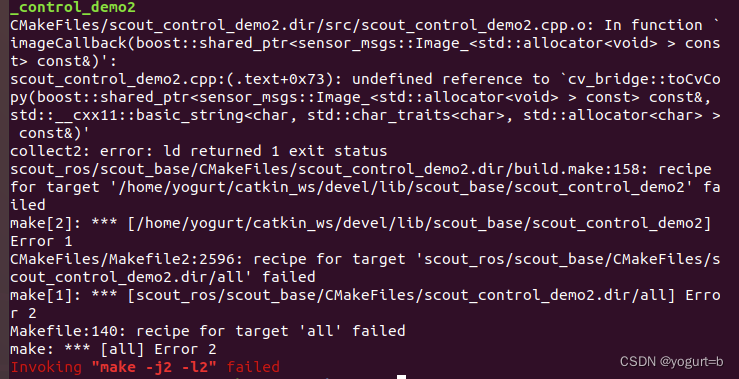
添加cv_bridge
运行实验
sudo ip link set can0 up type can bitrate 500000
cd catkin_ws/
终端1) 运行scout底盘节点对应的launch文件
roslaunch scout_bringup scout_robot_base.launch
终端2) 运行摄像头
source ./devel/setup.bash
roslaunch robot_vision usb_cam.launch
roslaunch usb_cam usb_cam-test.launch
终端3) 运行我们编写的节点
source ./devel/setup.bash
rosrun scout_base scout_control_demo2
需要的话可以检查虚拟机连接的摄像仪编号
ls /dev/video*
报错:core dumped

问题分析:
在回调函数中处理图像时,赋值cv::Mat image = cv_ptr -> image;和其后的颜色转换步骤可能发生在图像显示之前,导致cv_ptr 可能为空值,产生了段错误(访问空指针)。
所以在对图像进行操作之前,需要确保它已经成功接收到并且不是空的。
这种并行处理也可能出问题:在回调函数中将图像显示在窗口中,并在回调函数之外尝试进行颜色空间转换。这样的处理方式可能导致在图像处理的同时,图像数据发生变化,从而导致颜色空间转换时出现问题。
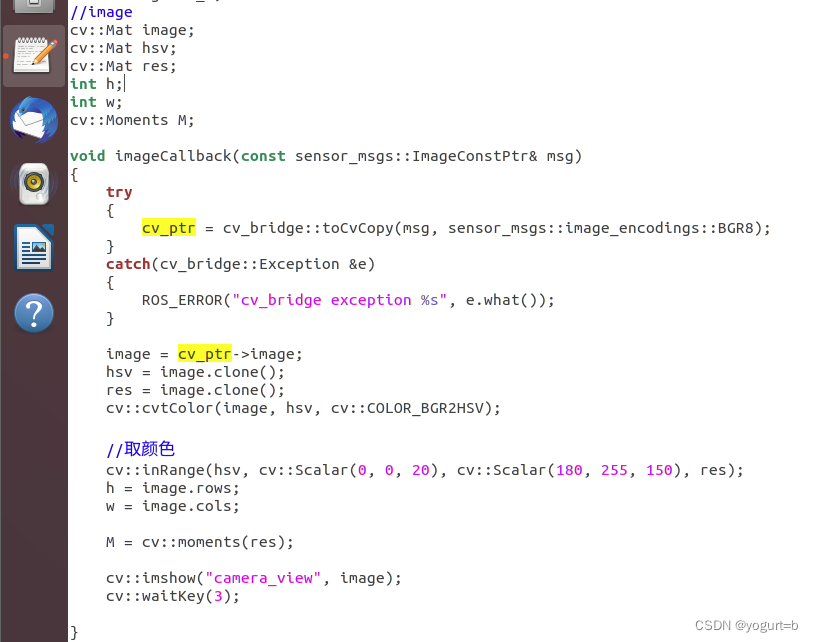
问题解决:
将将颜色空间转换放到回调函数内部:
#include <ros/ros.h>
#include <geometry_msgs/TwistStamped.h>
#include <nav_msgs/Odometry.h>
#include <sensor_msgs/Image.h>
#include <tf/transform_datatypes.h>
#include <cv_bridge/cv_bridge.h>
#include <opencv2/opencv.hpp>
#include <image_transport/image_transport.h>
#include <opencv2/highgui/highgui.hpp>
//速度控制话题消息类型类型
geometry_msgs::TwistStamped cmd_speed;
//
cv_bridge::CvImagePtr cv_ptr;
//小车x,y方向速度
double linear_x;
double linear_y;
// th
//转速
double angular_z;
//image
cv::Mat image;
cv::Mat hsv;
cv::Mat res;
int h;
int w;
cv::Moments M;
void imageCallback(const sensor_msgs::ImageConstPtr& msg)
{
try
{
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
}
catch(cv_bridge::Exception &e)
{
ROS_ERROR("cv_bridge exception %s", e.what());
}
image = cv_ptr->image;
hsv = image.clone();
res = image.clone();
cv::cvtColor(image, hsv, cv::COLOR_BGR2HSV);
//取颜色
cv::inRange(hsv, cv::Scalar(0, 0, 20), cv::Scalar(180, 255, 150), res);
h = image.rows;
w = image.cols;
M = cv::moments(res);
cv::imshow("camera_view", image);
cv::waitKey(3);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "scout_control_demo2");
ros::NodeHandle n;
// 发布话题 "/cmd_vel_raw"
ros::Publisher pub = n.advertise<geometry_msgs::TwistStamped>("/cmd_vel_raw", 5);
// 订阅话题
ros::Subscriber image_sub_ = n.subscribe("/usb_cam/image_raw", 1, imageCallback);
//配合r.sleep控制循环频率
ros::Rate r(50);
// 设置底盘运动速度,初始前进
linear_x = 0.0;
angular_z = 0.0;
linear_y = 0.0;
// 运动状态标识符
int tag = 0;
while(ros::ok())
{
cmd_speed.twist.linear.x = linear_x;
cmd_speed.twist.linear.y = linear_y;
// th
cmd_speed.twist.angular.z = angular_z;
//image = cv_ptr->image;
if(M.m00 > 0){
int cx = int (cvRound(M.m10 / M.m00));
int cy = int (cvRound(M.m01 / M.m00));
ROS_INFO("cx: %d cy: %d", cx, cy);
cv::circle(cv_ptr->image, cv::Point(cx, cy), 20, (0, 255, 0));
int v = cx - w / 2;
linear_x = 0.1;
angular_z = -float(v) / 300 * 0.3;
//?
//image_pub_.publish(cv_ptr->toImageMsg());
pub.publish(cmd_speed);
ROS_INFO("linearx: %F,angularz: %F",linear_x,angular_z);
}
else{
ROS_INFO("not found line!");
linear_x =0;
angular_z =-0.2;
pub.publish(cmd_speed);
}
//当处理到ros::spinonce()时,会去话题订阅缓冲区中查看有没有回调函数,如果有则去处理回调函数,如果没有则继续往下执行
ros::spinOnce();
r.sleep();
}
return 0;
}
实验结果
找不到什么问题,代码好像也没毛病,能够正常识别线条更改速度并显示在屏幕上但是驱动不了小车。可能是src内部某些文件出了问题吧。实验失败。。
这里是同学的代码,更换了他的src文件夹,能够正常运行。
#include<ros/ros.h>
#include<sensor_msgs/Image.h>
#include<geometry_msgs/Twist.h>
#include<cv_bridge/cv_bridge.h>
#include<opencv2/opencv.hpp>
#include<opencv2/imgproc.hpp>
#include<opencv2/imgproc/types_c.h>
#include<opencv2/core/core.hpp>
double twist_linear_x , twist_angular_z; // two kinds speed
sensor_msgs::Image hsv_image; //s
void image_Callback(const sensor_msgs::Image& msg);
int main(int argc, char **argv){
ros::init(argc, argv, "follower_line"); // init note
ros::NodeHandle nh;
ros::Subscriber img_sub = nh.subscribe("/usb_cam/image_raw", 10, image_Callback); // 更改为订阅 /usb_cam/image_raw 订阅者img_sub来接收来自USB摄像头的原始图像,and image_Callback
ros::Publisher cmd_pub = nh.advertise<geometry_msgs::Twist>("/cmd_vel", 10); // 分别用于发布 小车的速度指令 和 处理后的图像。
ros::Publisher img_pub = nh.advertise<sensor_msgs::Image>("/image_hsv",10);
while(ros::ok()){
geometry_msgs::Twist twist;
twist.linear.x = twist_linear_x;
twist.angular.z = twist_angular_z;
cmd_pub.publish(twist);
img_pub.publish(hsv_image);
ros::spinOnce();
}
return 0;
}
void image_Callback(const sensor_msgs::Image& msg){// 当从摄像头接收到图像时,函数触发, public speed cmd
cv_bridge::CvImagePtr cv_ptr;
// 确保使用正确的图像编码
try {
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8); // 使用cv_bridge将ROS的图像消息转换为OpenCV的图像格式
}
catch (cv_bridge::Exception& e) {
ROS_ERROR("cv_bridge exception: %s", e.what());
return;
}
cv::Mat image = cv_ptr->image; // 原始图像
cv::Mat hsv = image.clone(); // 用于后续的HSV转换
cv::Mat res = image.clone(); // 用于存储颜色过滤后的结果 (keep medium)
cv::cvtColor(image, hsv, cv::COLOR_BGR2HSV); // 颜色空间转换
cv::inRange(hsv, cv::Scalar(0, 0, 0), cv::Scalar(180, 255, 46), res); // 颜色过滤 -> res
// show
/*
cv::imshow("Filtered Image", res); // 显示过滤后的图像
cv::waitKey(1); // 等待1毫秒以更新窗口
*/
// 处理逻辑
// origin image
int h = image.rows;
int w = image.cols;
// search window
int search_top = 5 * h / 6;
int search_bot = search_top + 20;
for(int i = 0; i < search_top; i ++){
for(int j = 0; j < w; j ++){
res.at<uchar>(i,j) = 0; // set = 0 ,if not in search window
}
}
for(int i = search_bot; i < h; i++){
for(int j = 0; j < w; j ++){
res.at<uchar>(i,j) = 0; // set = 0 ,if not in search window
}
}
cv::Moments M = cv::moments(res); // 图像矩
if(M.m00 > 0){
int cx = int (cvRound(M.m10 / M.m00));
int cy = int (cvRound(M.m01 / M.m00));
// center in image
ROS_INFO("cx: %d cy: %d", cx, cy);
cv::circle(image, cv::Point(cx, cy), 10, (255, 255, 255));
// set speed
// 假设摄像头是再中间的
int v = cx - w / 2;
twist_linear_x = 0.1;
twist_angular_z = -float(v) / 300 * 0.4;
//cmd_pub.publish(twist);
}
else{
ROS_INFO("not found line!");
twist_linear_x = 0;
twist_angular_z = -0.1;
//cmd_pub.publish(twist);
}
// line's center,in image
sensor_msgs::ImagePtr hsv_image_ = cv_bridge::CvImage(std_msgs::Header(), "bgr8", image).toImageMsg();
hsv_image = *hsv_image_;
}
参考资料
[1] https://zhuanlan.zhihu.com/p/370996539
[2 ]https://www.bilibili.com/read/cv14789297/

















 1212
1212

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









