






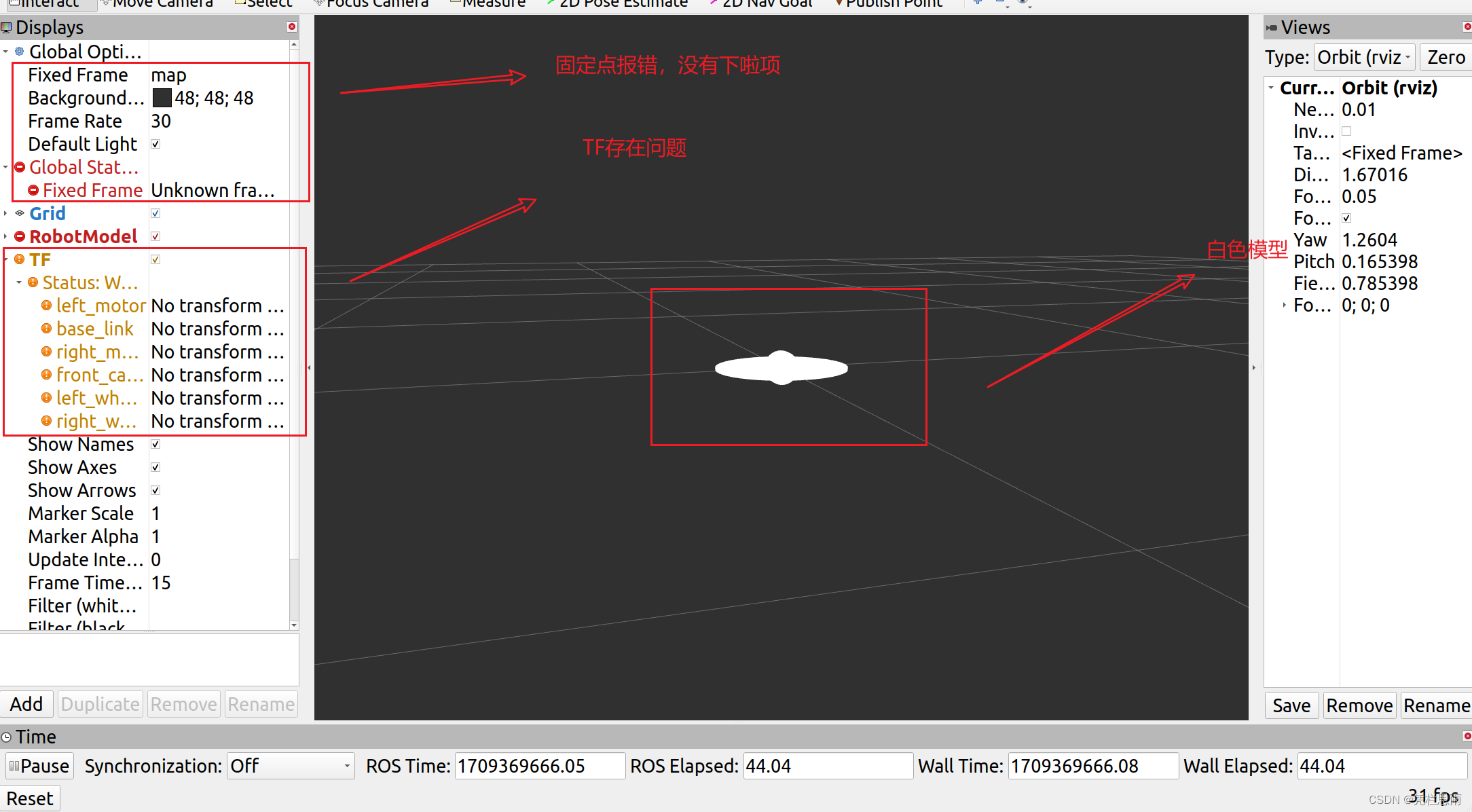
方法1:rosrun tf static_transform_publisher 0 0 0 0 0 0 map base_link 50 解决原理,给世界地图map和模型坐标系base_link做一个映射,方便rviz找到坐标系
方法2:直接从Fix _frame下拉框选择base_link
方法1:rosrun tf static_transform_publisher 0 0 0 0 0 0 map base_link 50 解决原理,给世界地图map和模型坐标系base_link做一个映射,方便rviz找到坐标系
方法2:直接从Fix _frame下拉框选择base_link











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 1208
1208





