




ROS1
启动 ROS1 主节点(roscore)
打开 第一个终端,运行:
bash
roscore
- 这会启动 ROS1 的核心服务(必须保持运行)。
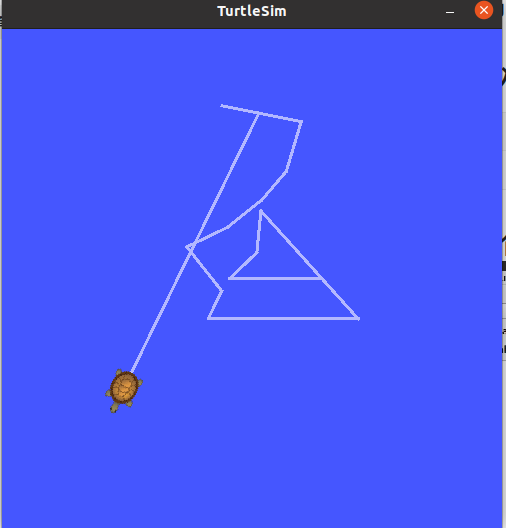
3. 启动小乌龟仿真器(turtlesim_node)
打开 第二个终端,加载环境变量后运行:
bash
rosrun turtlesim turtlesim_node
- 此时会弹出一个窗口,显示一只静止的小乌龟。
4. 启动键盘控制节点(teleop_turtle)
打开 第三个终端,加载环境变量后运行:
bash
rosrun turtlesim turtle_teleop_key
- 在此终端中按方向键(↑ ↓ ← →)即可控制小乌龟移动。
ROS2
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
节点
终端输入
rqt
打开一个工具
点击工具栏的Plugins->introspection->Node Graph
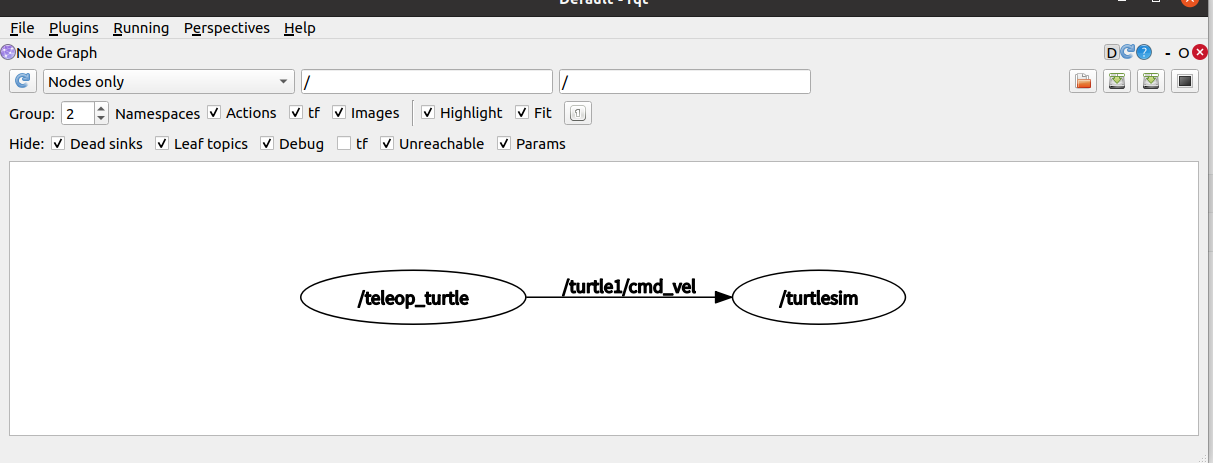
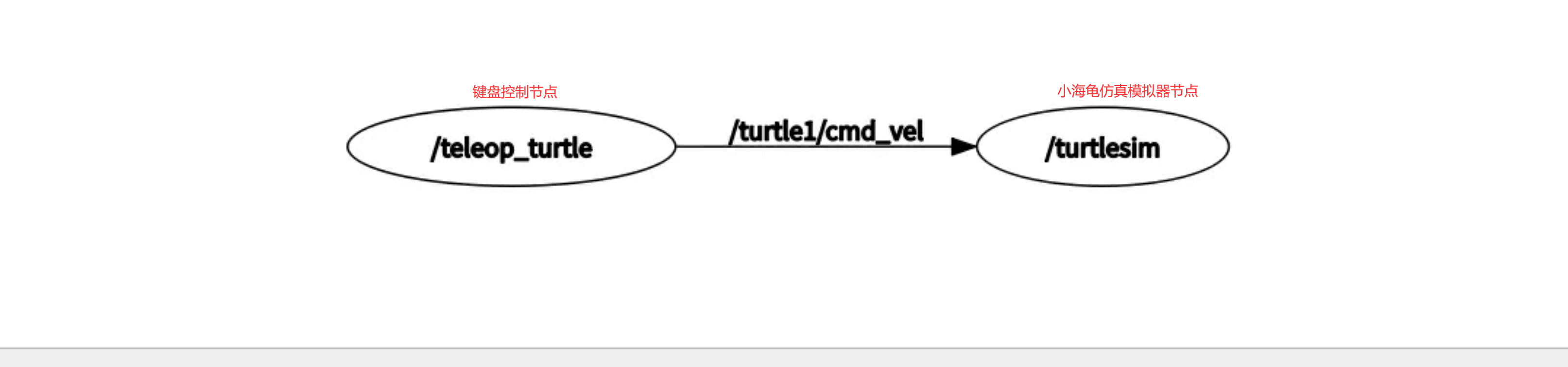
中间的线段:箭头指向谁,就是谁向谁发布了一个话题。
像此图就是turtle向turtlesim发布了一个cmd_vel(键盘控制命令)的话题,
方针模拟器:

















 3777
3777

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









