



 本文介绍了如何在ROS环境中配置镭神单线激光雷达M10-P,包括修改坐标系、设置IP地址以及选择雷达型号。随后,文章详细展示了安装和使用hector-slam进行地图构建的过程,包括参数配置和使用rviz进行可视化。最终,通过roslaunch启动hector.launch文件,实现激光雷达点云与地图的显示。
本文介绍了如何在ROS环境中配置镭神单线激光雷达M10-P,包括修改坐标系、设置IP地址以及选择雷达型号。随后,文章详细展示了安装和使用hector-slam进行地图构建的过程,包括参数配置和使用rviz进行可视化。最终,通过roslaunch启动hector.launch文件,实现激光雷达点云与地图的显示。
0-硬件
a.镭神单线激光雷达M10-P
b.官网下载激光雷达驱动包;
cd ~/leishen_ws
catkin_make
cd src/lslidar_driver/launch
vim lslidar_net.launch
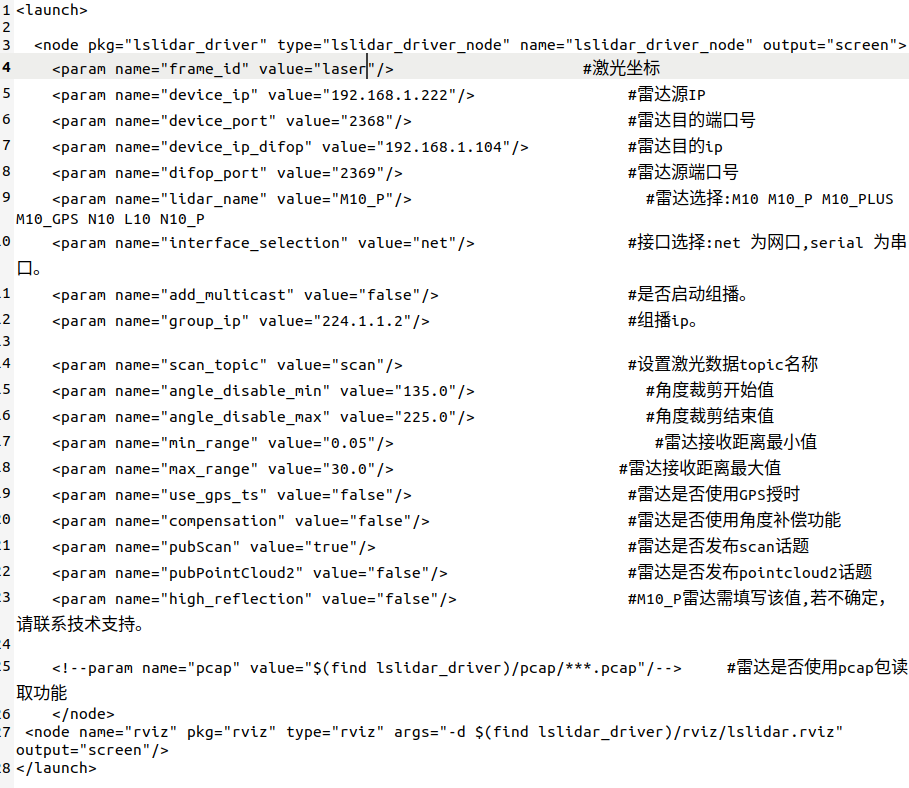
1)修改激光雷达坐标为“laser”;
2)修改激光雷达源IP为192.168.1.222;
3)修改雷达目标IP为192.168.1.104;
4)雷达型号选择“M10_P”;
cd ~/leishen_wssource devel/setup.bash
roslaunch lslidar_driver lslidar_net.launch
1-软件
1-1 hector
sudo apt-get install ros-noetic-hector-slam
sudo touch hector.launch
<launch>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="2048"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<param name="map_multi_res_levels" value="2" />
<param name="map_pub_period" value="2" />
<param name="laser_min_dist" value="0.4" />
<param name="laser_max_dist" value="5.5" />
<param name="output_timing" value="false" />
<param name="pub_map_scanmatch_transform" value="true" />
<!--<param name="tf_map_scanmatch_transform_frame_name" value="scanmatcher_frame" />-->
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.7" />
<param name="map_update_distance_thresh" value="0.2"/>
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
<param name="scan_topic" value="scan"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster" args="0 0 0 0 0 0 /base_link /laser 100"/>
<node pkg="rviz" type="rviz" name="rviz"
args="-d $(find hector_slam_launch)/rviz_cfg/mapping_demo.rviz"/>
</launch>
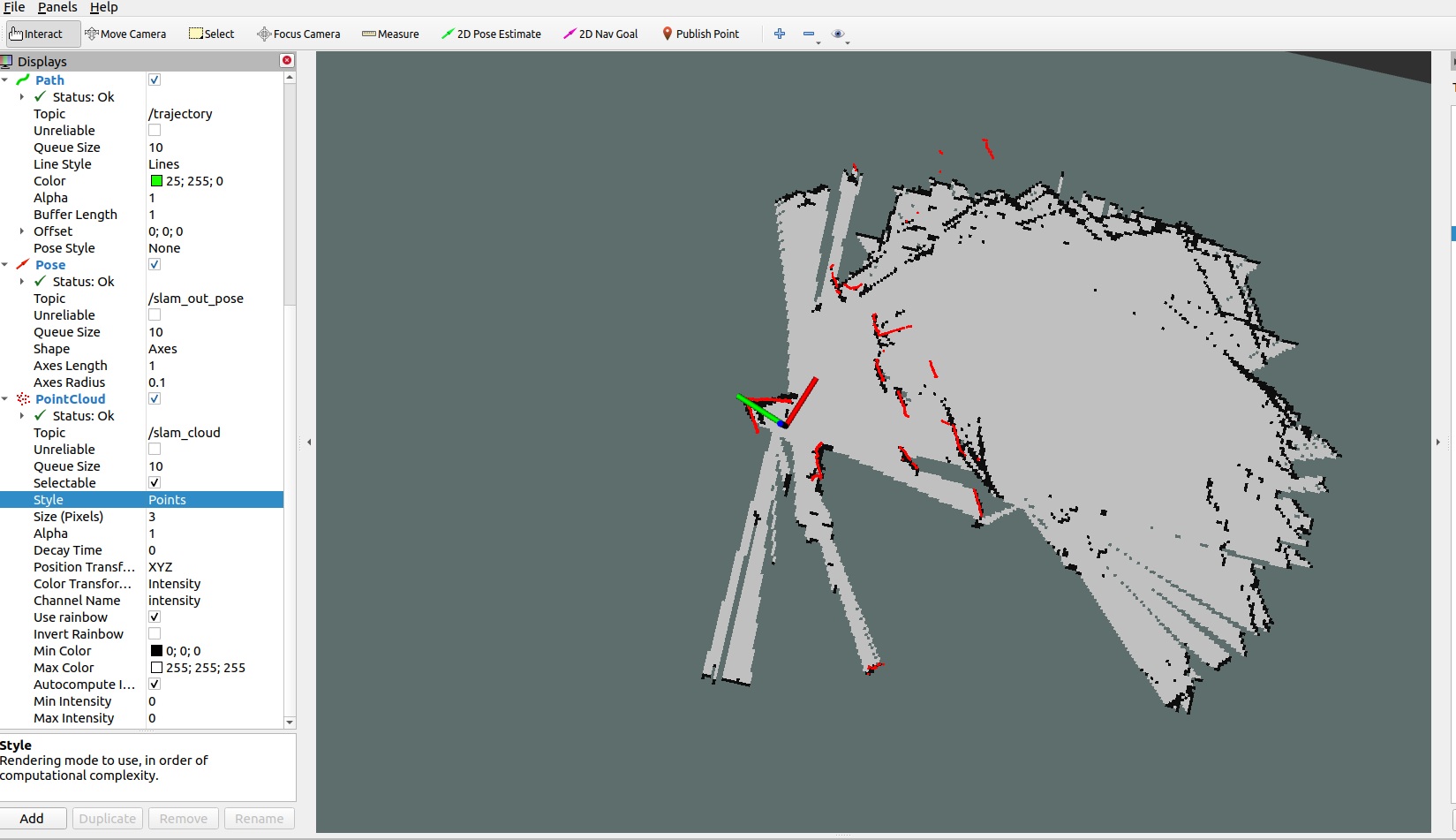
roslaunch hector.launch 启动后,即可看到地图与激光雷达点云!!

















 5350
5350

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









