







一.安装turtlebot3
Ubuntu18.04 实现:安装turtlebot3功能包、虚拟机与机器人之间的网络配置、测试机器人Cartographer建图_Charlesffff的博客-CSDN博客
二.安装gazebo
ROS18.04:安装gazebo,下载模型_gazebo下载模型_Charlesffff的博客-CSDN博客
三.gazebo创建地图 (world文件)
打开ROSmaster
roscore打开gazebo
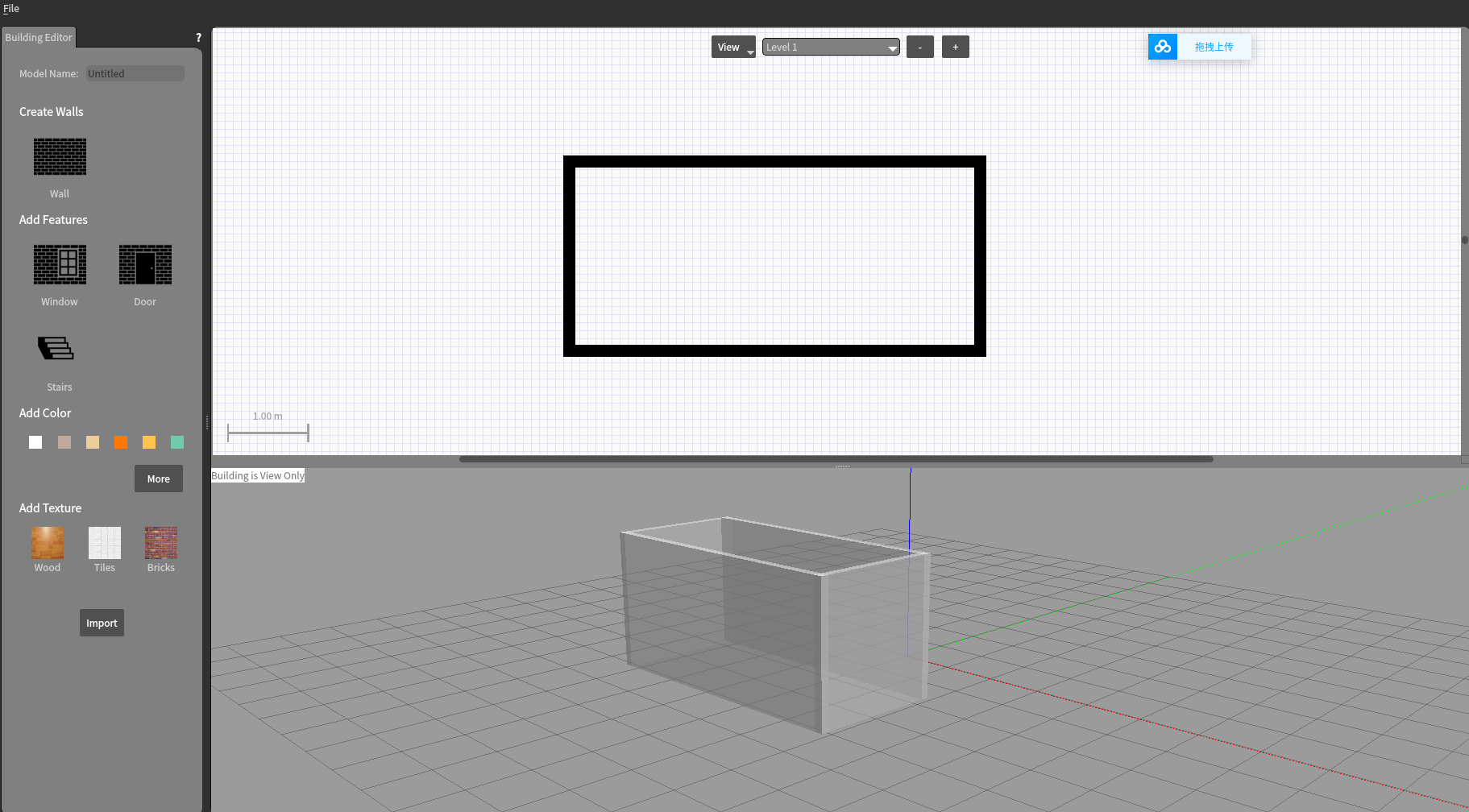
sudo gazebo点击edit—>Building Editor,从左边选择wall,然后开始创建自己的地图。
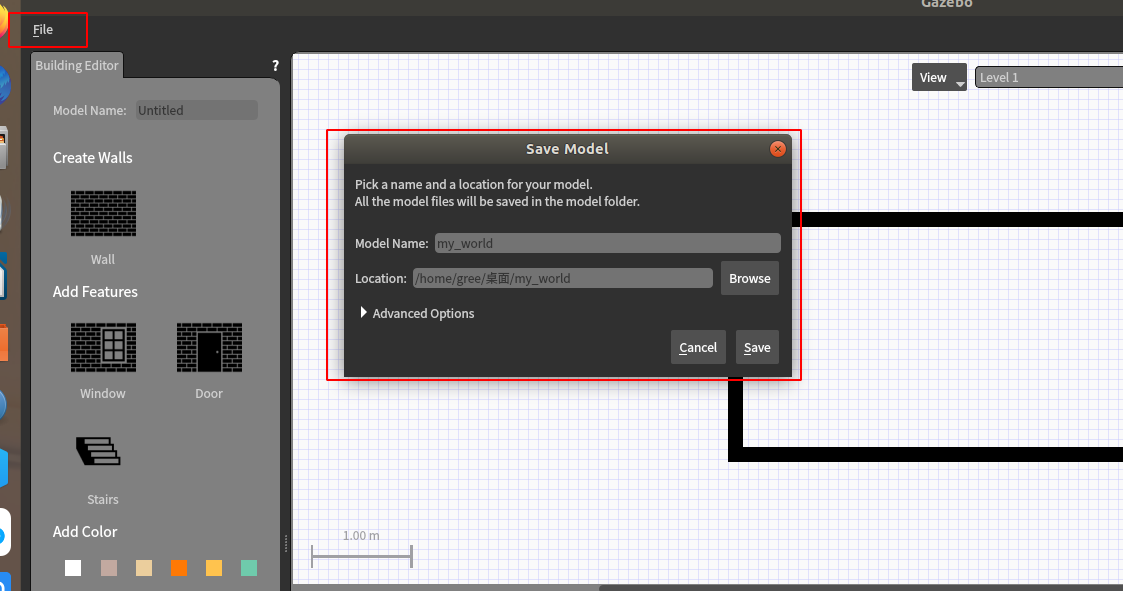
点击File—>Save As存储自己的地图
之后关闭gazebo,然后重新打开
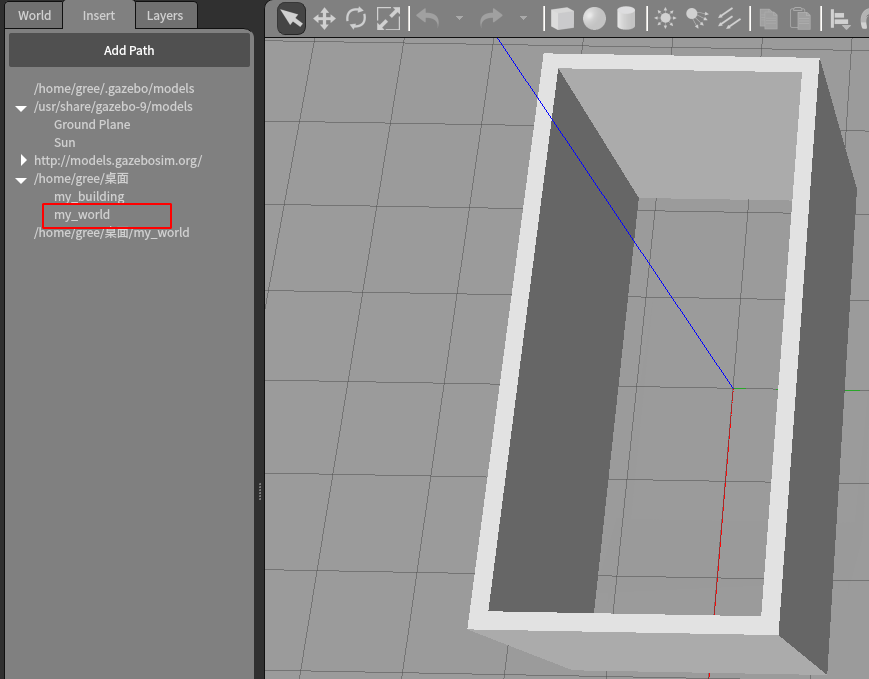
sudo gazebo点击Insert—>Add Path—> 之前创建的地图文件
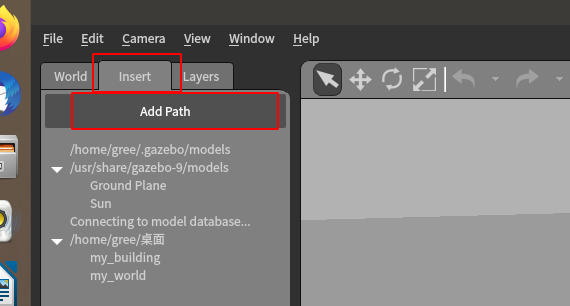
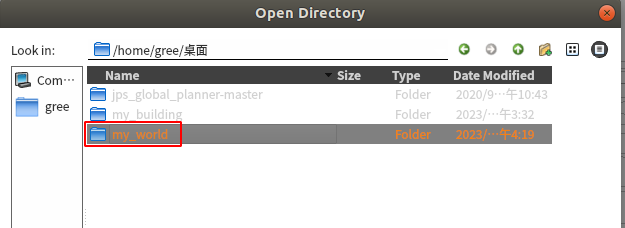
点击之前创建地图文件,在gazebo上布局
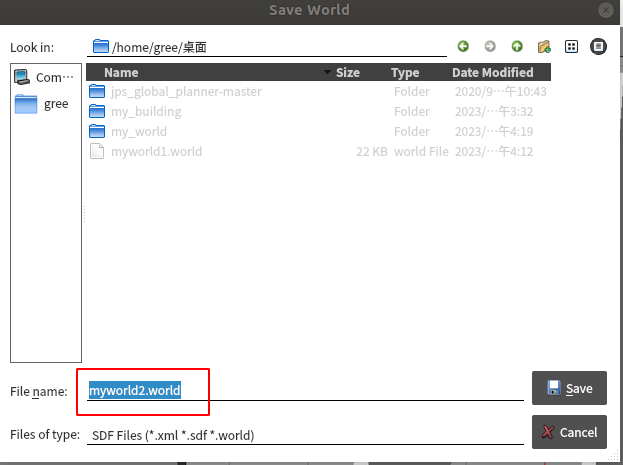
点击File—>Save World As,输入filename.world(一定要写.wolrd!)
四.turtlebot加载world文件(加载地图)
将之前创建的.world文件放入world文件夹中:

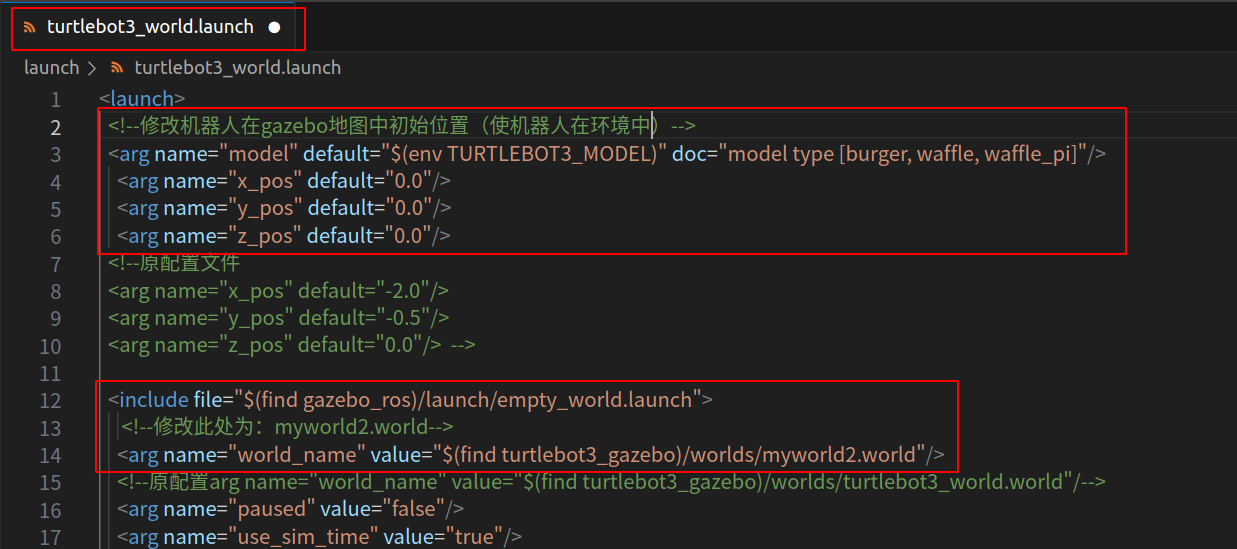
到turtlebot目录下找turtlebot3_world.launch文件,具体路径如下:

修改 turtlebot3_world.launch文件,加载地图,初始化机器人在地图中初始位置(下一步可以看到效果)
启动gazebo模型:
roslaunch turtlebot3_gazebo turtlebot3_world.launch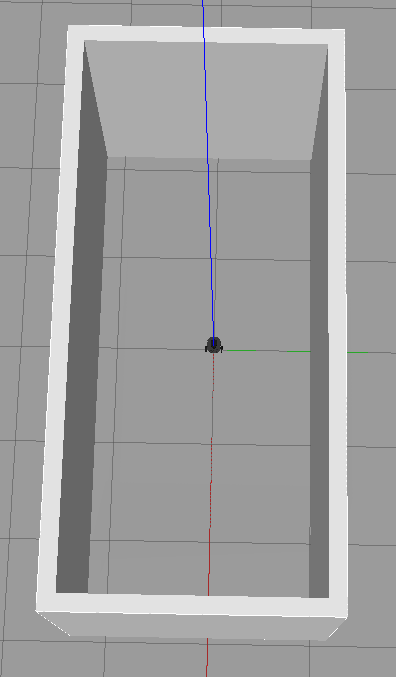
运行键盘结点,控制机器人运行:
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
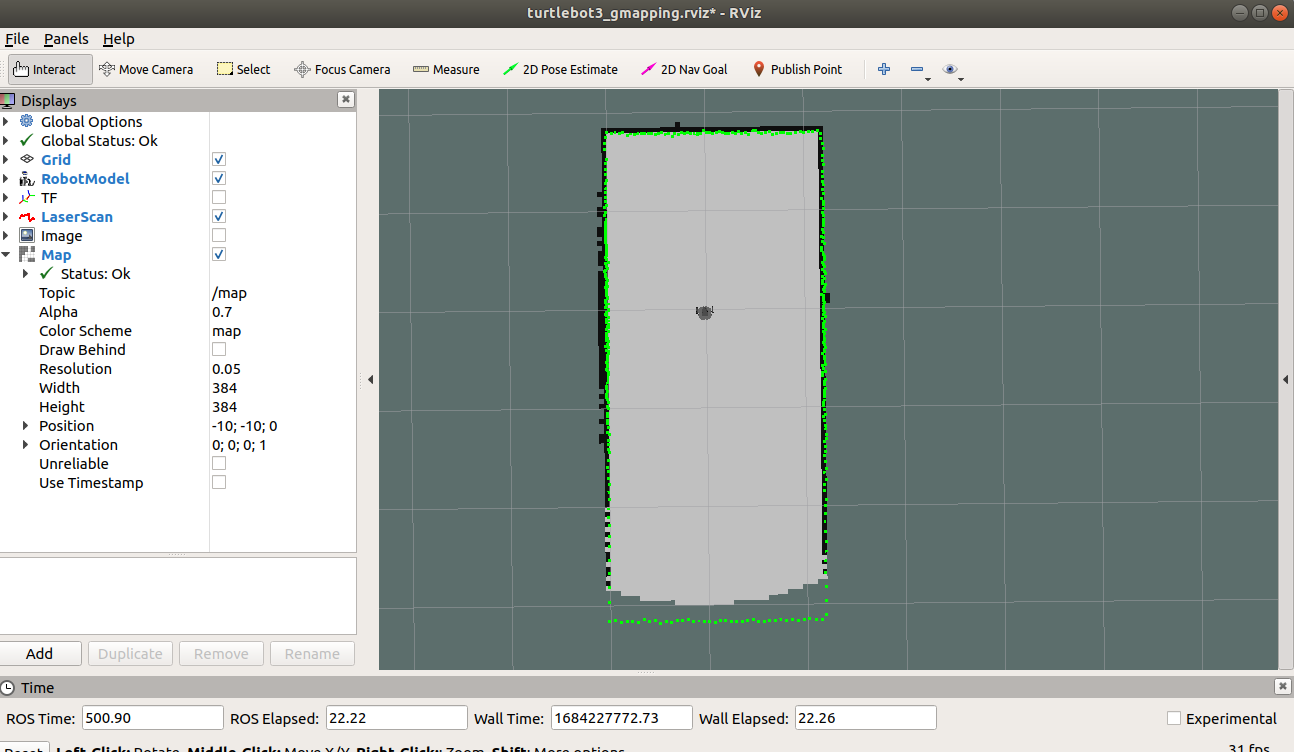
启动SLAM算法开始建图:
roslaunch turtlebot3_slam turtlebot3_slam.launch
五.启动map_server,保存地图(pgm和yaml)
在地图构建完成之后,启动map_server,保存地图信息:
rosrun map_server map_saver -f ~/map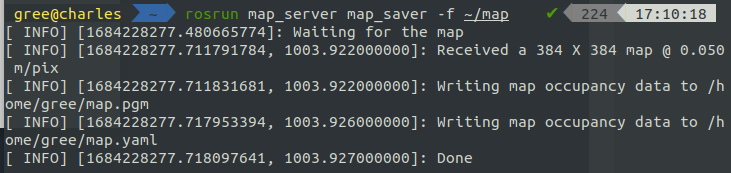















 2292
2292











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









