







安装完ROS系统后,您可能会迫不及待地想要探索其功能和魅力。为了让您快速体验ROS的乐趣,本文将为您详细介绍如何安装和操作仿真小乌龟。无需复杂的配置和编程知识,您将轻松掌握ROS系统的基本操作,畅享科技的魅力!
1、运行ros系统
roscore
2、安装和运行rqt_robot_steering
sudo apt install ros-noetic-rqt-robot-steering
rosrun rqt_robot_steering rqt_robot_steering

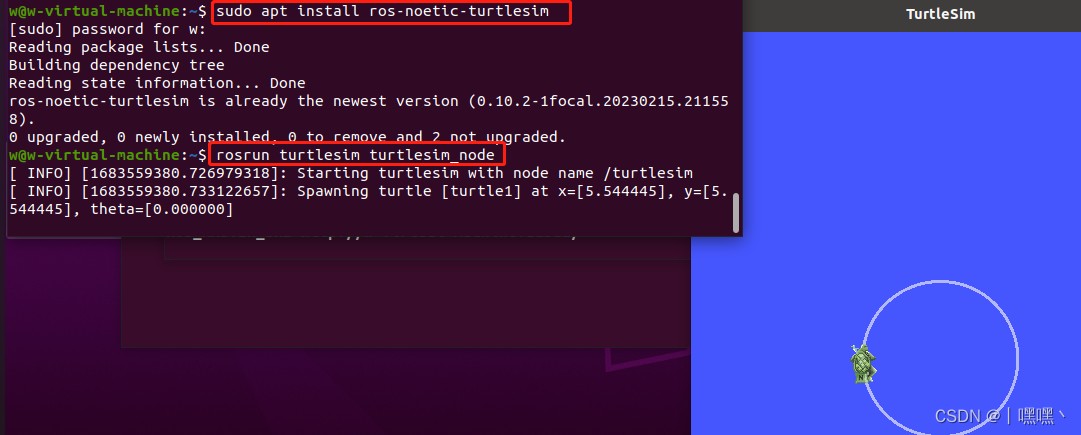
3、安装和运行turtlesim
sudo apt install ros-noetic-turtlesim
rosrun turtlesim turtlesim_node
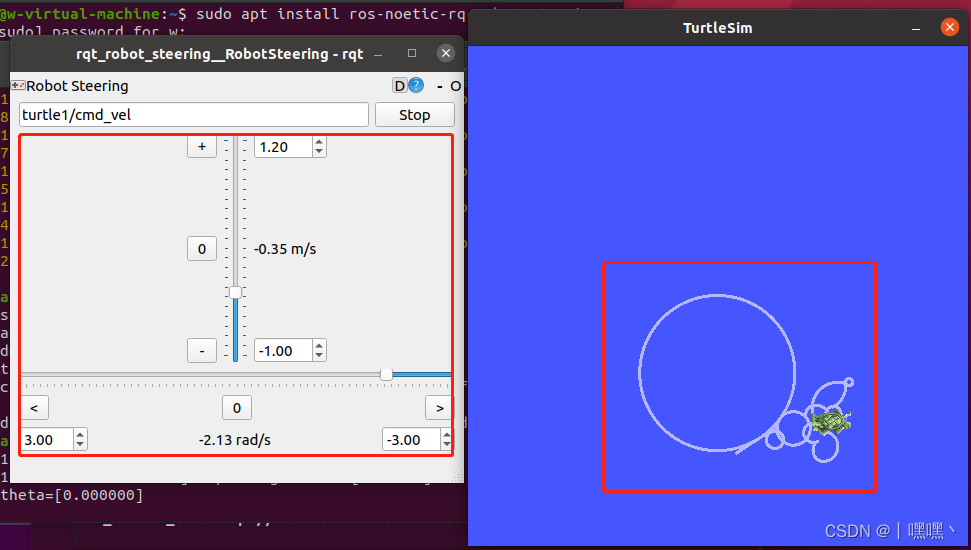
4、将弹出的RobotSteering路径前面加上turtle1
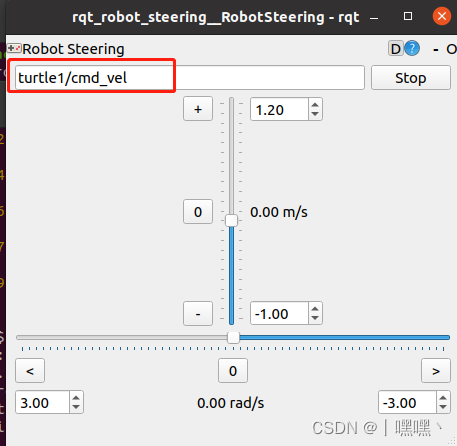
5、滑动操作界面的滑块,将可以看到小乌龟动起来!















 6677
6677











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









