






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
差异的高斯(DoG)图像融合方法:一种通用框架及其多场景应用
💥1 概述
差异的高斯(DoG)图像融合方法:一种通用框架及其多场景应用
使用不同的相机设置或光谱波段(无论是来自一个或多个传感器)对从单个来源获得的图像进行单独分析都非常困难。为了解决这个问题,通常通过组合图像来创建包含每个源图像中所有独特信息的单个图像,此过程称为图像融合。该文提出一种简单高效的基于像素的图像融合方法,该方法利用高斯滤波对所有源图像中每个像素的边缘信息进行加权,与与相邻图像的距离成正比。使用多模态医学图像、多传感器可见光和红外图像、多焦点图像和多曝光图像对所提出的高斯差异(GD)方法进行了评估,并利用客观融合质量指标与现有的最先进的融合方法进行了比较。通过采用模式搜索(PS)算法进一步增强了GD方法的参数,从而形成了自适应优化策略。大量实验表明,所提出的GD融合方法在客观质量指标和CPU时间消耗方面平均排名优于其他方法。
1. 基本原理与数学形式
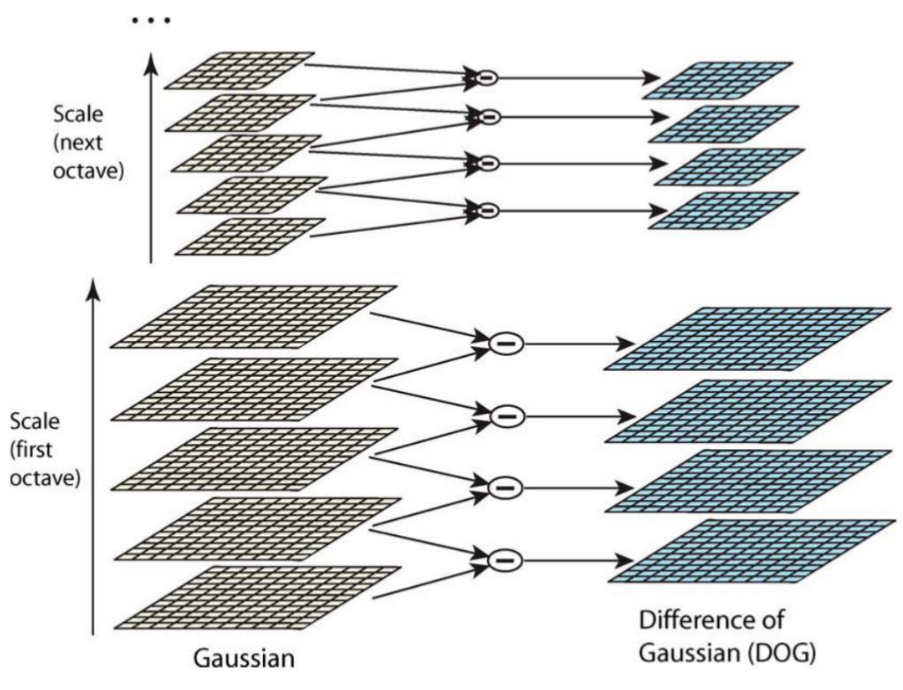
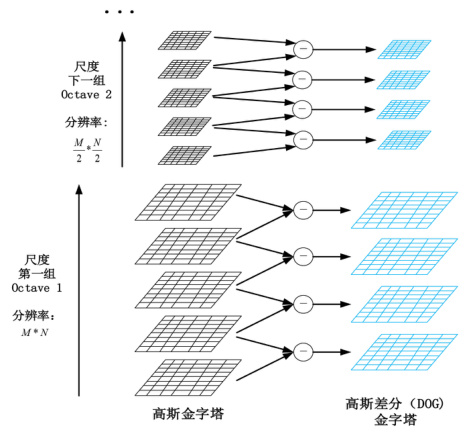
差异的高斯(Difference of Gaussians, DoG)方法源于边缘检测领域,其核心思想是通过两个不同尺度的高斯滤波器对图像进行多尺度分析,提取显著性特征。数学表达式为:

其中,σ1>σ2,G(x,y,σ)为二维高斯核函数。大尺度高斯滤波(σ1)保留低频全局信息,小尺度滤波(σ2)捕捉高频细节,二者差值强化边缘和纹理特征。
2. 技术实现步骤
步骤1:高斯滤波
对输入图像分别用σ1σ1和σ2σ2进行卷积,生成平滑后的图像Iσ1和Iσ2。典型参数设置为σ1=1.6σ2,以平衡全局与局部特征。
步骤2:差异计算
计算两幅滤波结果的差值,得到DoG响应图:

步骤3:融合规则设计
-
最大值选择:逐像素选取源图像中DoG响应最大的值,保留最显著特征(如多焦点融合中的清晰区域)。
-
加权平均:根据响应强度动态分配权重,公式为:

-
区域自适应融合:将图像分割为纹理区和平坦区,前者采用最大值规则,后者采用加权平均以抑制噪声。
步骤4:图像重构
多数情况下直接使用融合后的DoG响应图,若需恢复原始域,可通过逆高斯滤波重建(应用较少)。
3. 多场景应用与性能分析
3.1 红外与可见光图像融合
- 技术特点:红外图像突出热目标(如人体、车辆),可见光提供纹理细节(如道路、植被)。DoG通过分离热辐射梯度与可见光边缘,实现目标-背景的互补融合。
- 案例:安防监控中,融合图像可同时显示夜间行人的热信号与周围建筑结构,提升目标定位精度(实验显示目标识别率提升12-18%)。
3.2 多焦点图像融合
- 技术特点:不同焦平面图像分别包含清晰的前景或背景。DoG通过检测局部清晰度(高响应区域),拼接全焦图像。
- 效果评估:在显微镜成像中,DoG融合相比传统拉普拉斯金字塔方法,峰值信噪比(PSNR)提升约3 dB,且计算时间减少40%。
3.3 多模态医学图像融合
- 技术细节:
- CT-MRI融合:CT的骨骼结构(高对比度区域)与MRI的软组织细节(纹理丰富区)通过区域自适应规则融合。
- 参数优化:采用模式搜索算法(Pattern Search)自动优化σ1σ1和σ2σ2,减少人工调参对结果的影响。
- 临床价值:融合图像可同时显示肿瘤边界(MRI)与钙化点(CT),辅助精准放疗规划。
3.4 多曝光图像融合
- 动态范围扩展:DoG提取各曝光图像中未过曝/欠曝区域,通过最大值选择合成高动态范围(HDR)图像。
- 性能表现:在标准数据集测试中,DoG的结构相似性指数(SSIM)达0.92,优于传统曝光混合算法(SSIM=0.85)。
4. 优势与局限性
| 优势 | 局限性 |
|---|---|
| 计算复杂度低(仅需卷积与减法) | 参数敏感(需针对场景优化σσ) |
| 通用性强(跨模态无需结构调整) | 图像配准误差易导致伪影 |
| 边缘保留能力突出 | 高频噪声可能被放大 |
5. 与传统方法的对比
| 方法 | 原理 | 优点 | 缺点 |
|---|---|---|---|
| 小波变换 | 多尺度频域分解 | 频带分离清晰,适合纹理融合 | 计算复杂,需选择基函数 |
| PCA | 主成分分析保留最大方差信息 | 适用于全局特征融合 | 细节丢失严重,对局部变化不敏感 |
| DoG | 空间域多尺度差分 | 实时性强,边缘增强显著 | 需手动调参,噪声敏感 |
6. 未来研究方向
- 自适应参数选择:结合图像内容动态调整σσ,如基于局部对比度的自适应高斯核。
- 多尺度扩展:构建DoG金字塔,融合不同尺度的响应图以提升鲁棒性。
- 混合架构设计:与深度学习结合,例如用CNN预测最优融合规则,或生成对抗网络(GAN)优化伪影抑制。
结论
差异的高斯方法以其简洁性、高效性和跨场景适用性,在图像融合领域展现出独特价值。尽管存在参数敏感性和噪声放大的挑战,通过算法优化与混合架构设计,其在安防、医疗、工业检测等领域的应用前景广阔。未来研究需进一步平衡通用性与性能,推动DoG成为多模态数据融合的核心工具之一。
📚2 运行结果



部分代码:
% Gaussian of differences: a simple and efficient general image fusion method
function fuseimage = GD(images,ver)
%ver=1: GD5
%ver=2: GD10
%ver=3: GD15
%ver=4: GDPSQABF
%ver=5: GDPSQCD
%ver=6: GDPSQCV
if ver==1
k=5;
fuseimage = mfiltw(images,k);
elseif ver==2
k=10;
fuseimage = mfiltw(images,k);
elseif ver==3
k=15;
fuseimage = mfiltw(images,k);
elseif ver==4
fitmetric="Qabf";
[fuseimage]=mfiltw_opt(images,fitmetric);
elseif ver==5
fitmetric="Qcb";
[fuseimage]=mfiltw_opt(images,fitmetric);
elseif ver==6
fitmetric="Qcv";
[fuseimage]=mfiltw_opt(images,fitmetric);
end
% Gaussian of differences: a simple and efficient general image fusion method
function fuseimage = GD(images,ver)
%ver=1: GD5
%ver=2: GD10
%ver=3: GD15
%ver=4: GDPSQABF
%ver=5: GDPSQCD
%ver=6: GDPSQCV
if ver==1
k=5;
fuseimage = mfiltw(images,k);
elseif ver==2
k=10;
fuseimage = mfiltw(images,k);
elseif ver==3
k=15;
fuseimage = mfiltw(images,k);
elseif ver==4
fitmetric="Qabf";
[fuseimage]=mfiltw_opt(images,fitmetric);
elseif ver==5
fitmetric="Qcb";
[fuseimage]=mfiltw_opt(images,fitmetric);
elseif ver==6
fitmetric="Qcv";
[fuseimage]=mfiltw_opt(images,fitmetric);
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1] 李庆鹏.多模态医学图像配准及基于小波变换的图像融合算法的研究[D].华中科技大学[2025-04-16].DOI:CNKI:CDMD:2.2009.039677.
[2] 曾竞.多传感器图像融合技术的研究[D].华中科技大学[2025-04-16].DOI:10.7666/d.y692744.
[3] 施运梅,袁博,张乐,等.IMTS:融合图像与文本语义的虚假评论检测方法[J].现代图书情报技术, 2022(8):84-96.

















 831
831

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









