








 本文介绍了遗传算法在扫地机器人路径规划中的应用,详细阐述了遗传算法的原理、算子和编码操作,并展示了部分代码和仿真结果。结合参考文献,该文探讨了基于遗传算法的智能扫地机器人路径规划方法。
本文介绍了遗传算法在扫地机器人路径规划中的应用,详细阐述了遗传算法的原理、算子和编码操作,并展示了部分代码和仿真结果。结合参考文献,该文探讨了基于遗传算法的智能扫地机器人路径规划方法。
1 简介
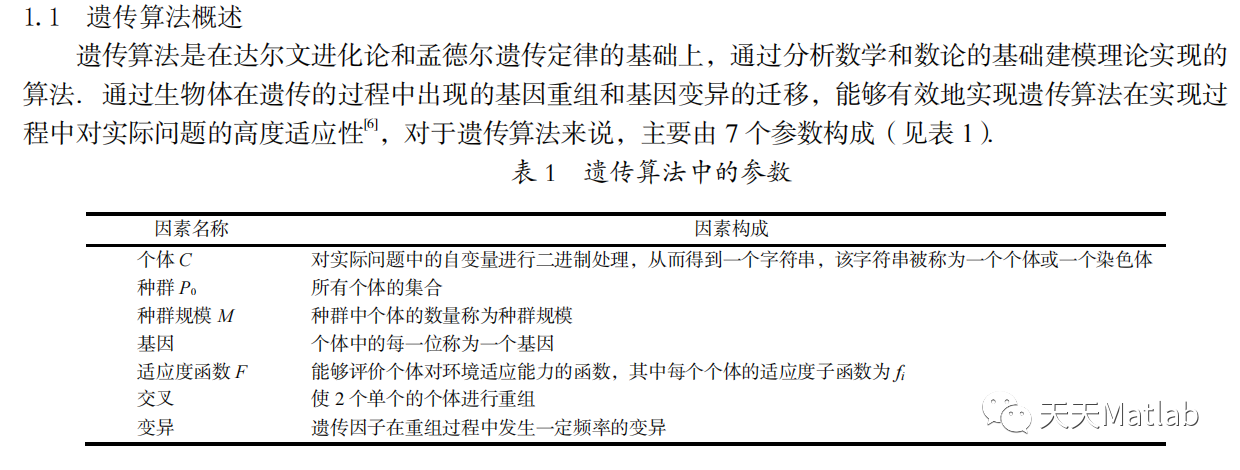
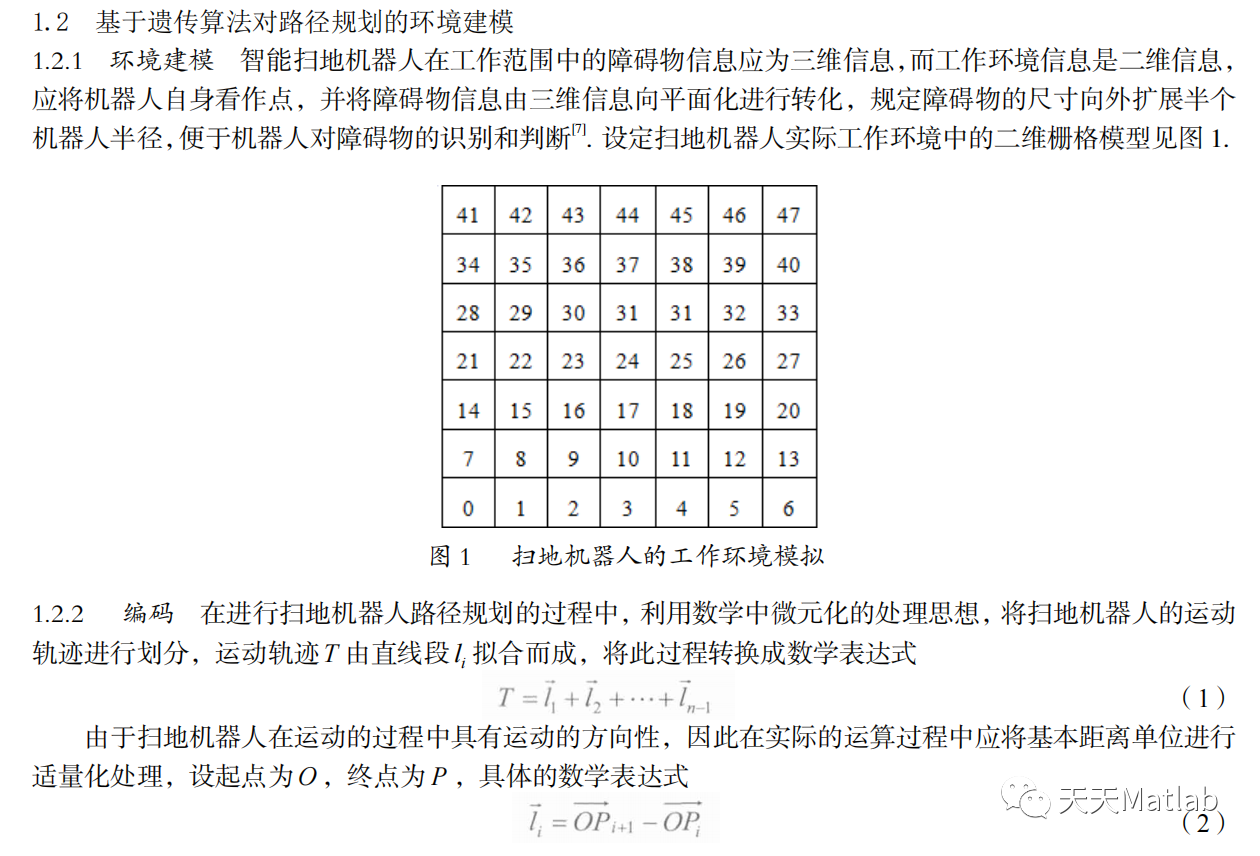
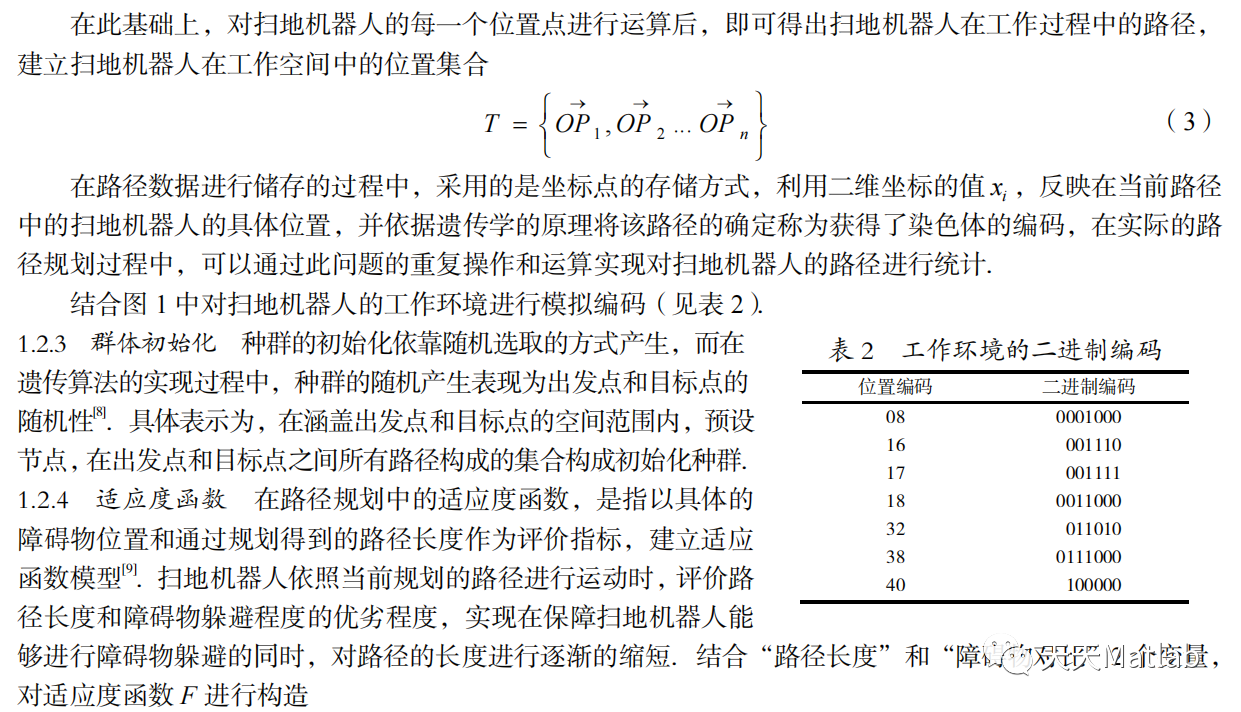
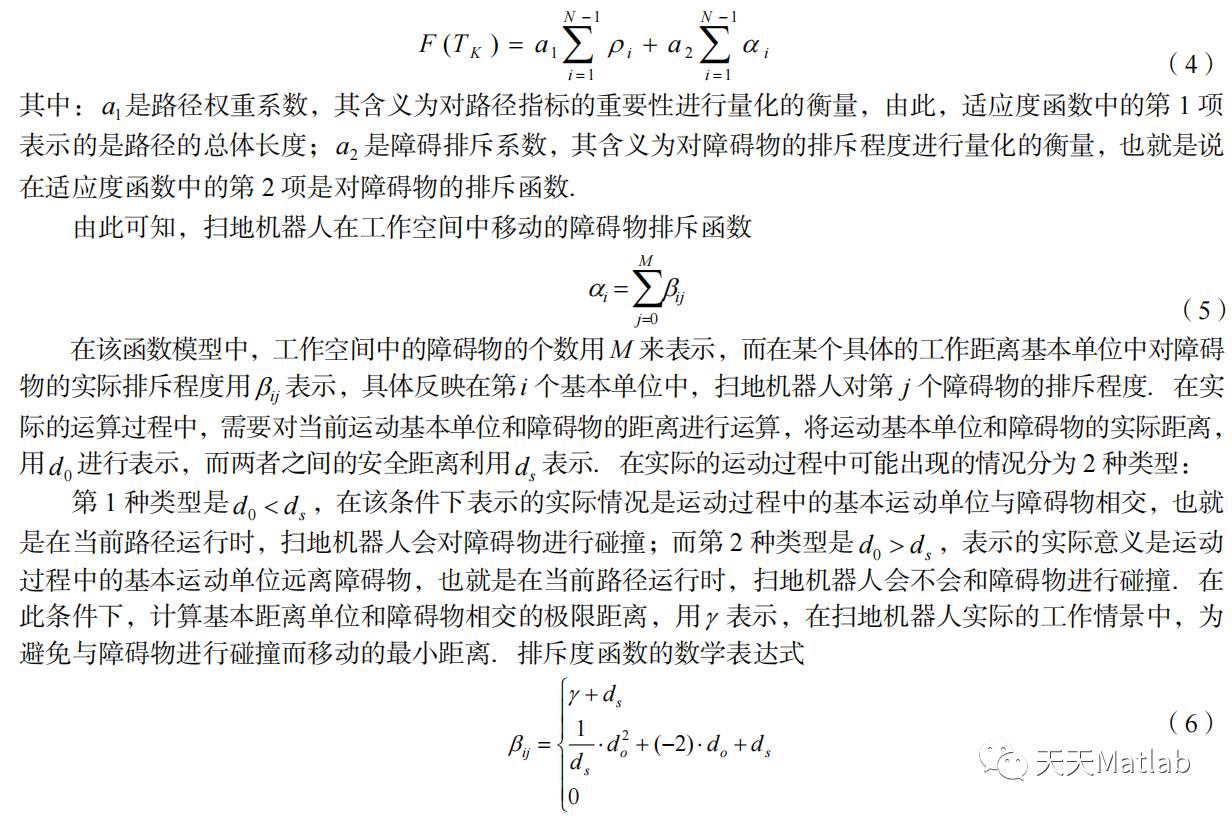
扫地机器人的路径规划是机器人学科的一个重要的研究领域,研究的范围涉及人工智能学、机器人学、数学分析以及计算机编程等多个领域和学科.在人工智能快速发展的背景下,扫地机器人的使用获得了空前的发展,并且机器人的路径规划及研究引发了各界的广泛重视.本文基于扫地机器人及其路径规划理论,通过详细介绍遗传算法原理、算子介绍及编码操作,将遗传算法用于求解智能扫地机器人的路径规划.

扫地机器人的路径规划是机器人学科的一个重要的研究领域,研究的范围涉及人工智能学、机器人学、数学分析以及计算机编程等多个领域和学科.在人工智能快速发展的背景下,扫地机器人的使用获得了空前的发展,并且机器人的路径规划及研究引发了各界的广泛重视.本文基于扫地机器人及其路径规划理论,通过详细介绍遗传算法原理、算子介绍及编码操作,将遗传算法用于求解智能扫地机器人的路径规划.
 6461
1万+
6461
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文

























