






GitHub杂谈
ROS从GitHub拷贝别人的代码
首先需要先下载git 在终端窗口输入sudo apt install git
之后就可以在GitHub寻找自己想要拷贝的项目文件,点击右上角的code,复制下方的网址。

在工作空间的src目录下打开终端 git clone 复制的网址
这样就把GitHub上的项目复制到了自己的文件夹,之后执行src目录下的script文件夹中关于自己ROS版本的命令,在script文件夹下打开终端,执行对应版本的文件,这样就把需要的依赖项进行了填补。
在工作目录catkin_ws目录下执行catkin_make进行编译
想要运行包里的一些功能,首先需要将catkin_ws的环境设置加载到参数服务器里面
source ~/catkin_ws/devel/setup.bash
之后再roslaunch启动项目的launch文件
为了防止每次都source环境配置,可以将这条指令添加到文件
在终端程序输入 gedit ~/.bashrc
在文件末尾添加source ~/catkin_ws/devel/setup.bash
保存
GitHub也可以直接跳过梯子访问
通过 gedit 指令修改系统的host文件
gedit /etc/host

将上述内容添加到末尾,之后Ubuntu就可以访问GitHub了
franka机械臂的相关包
通过ros_control和libfranka来研究机器人的控制
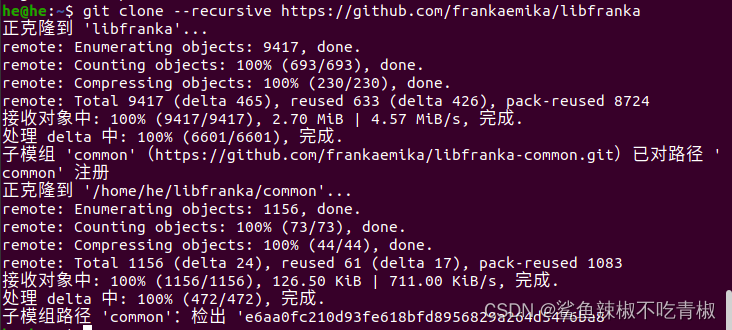
构建 libfrnaka(方式二,从源码构建)
推荐第二种方式的原因
使用方式一完成后有一些文件可能找不到,推荐方式二完成。


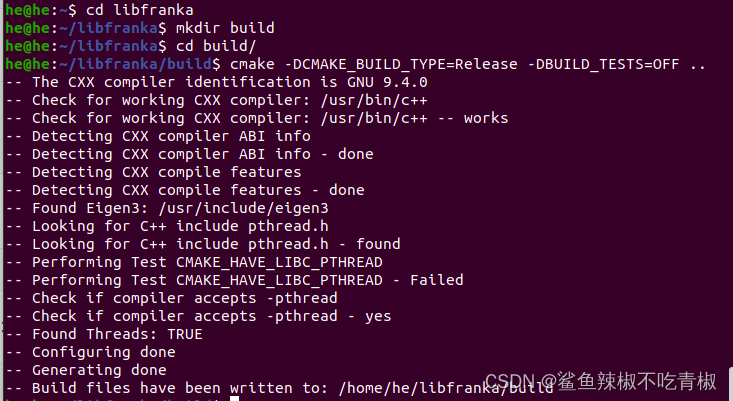
cmake --build .


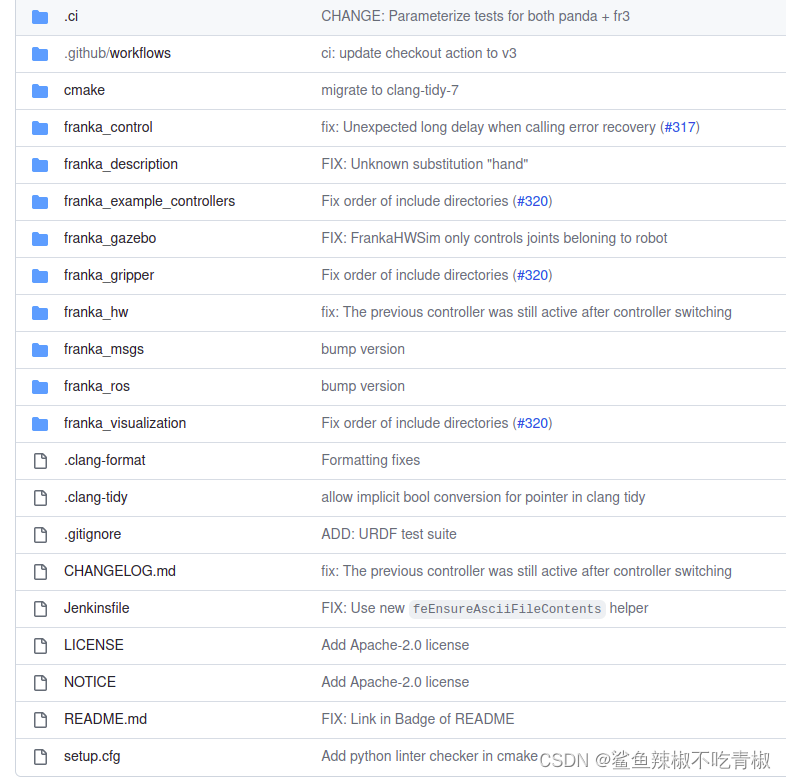
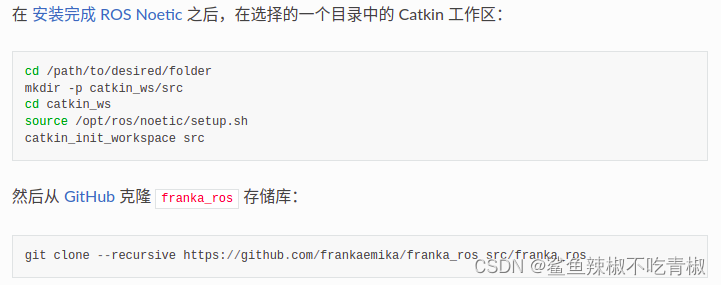
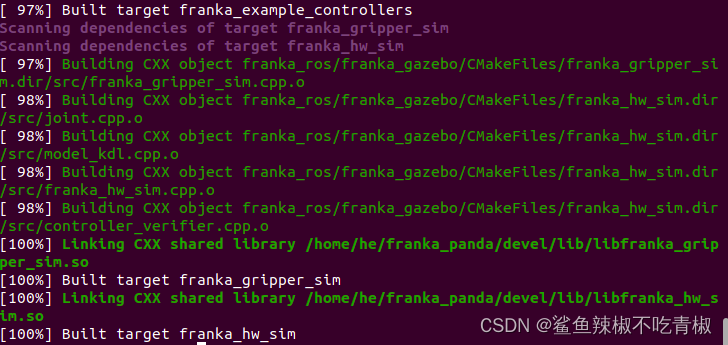
构建ros包

我是先git clone franka_ros再将那个文件夹放置包,所以没有按照上面过程。
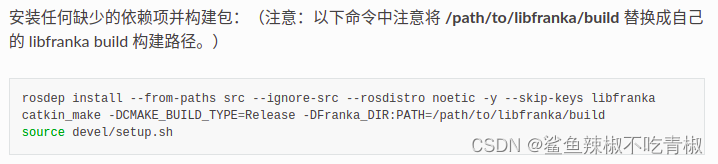

我的libfranka build安装在主目录:~/libfranka/build,指令的对应代码修改

![]()
内核(编译时大部分人出错)
我在文章里记录了第一次安装失败的过程,在安装的时候只参考所要的命令就行,不要按我的指令来,完全复制粘贴官方提供的指令就行。
设置实时内核
正确的方法我用块单独拎出来(即底纹是灰色的部分)



我的建议是直接使用官方文档提供的内核版本及补丁,除非你的应用要求安装对应版本的实时内核,否则就直接用官方提供的指令。下面也按照官方来
如果是执行上方命令我下面的演示就没必要看了,我下面是之前出错的文档整理
![]()



出现错误,无法识别文件格式


在内核的对于版本中找下.xz文件
Index of /pub/linux/kernel/projects/rt/
按照官网提供格式尝试 (没有与内核对应)
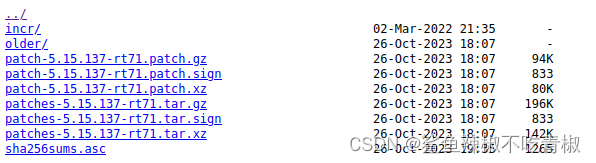
更改上方的4条下载指令
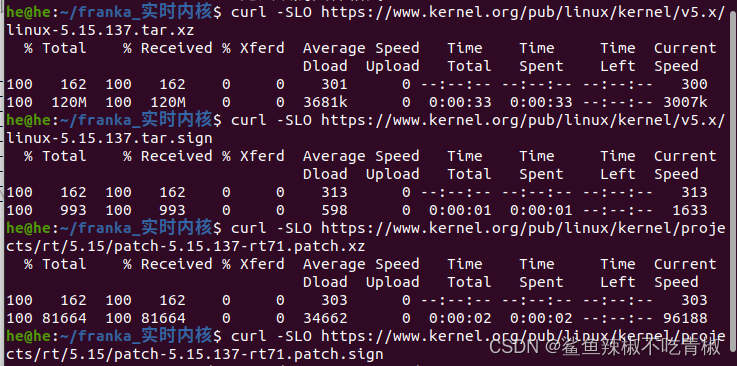
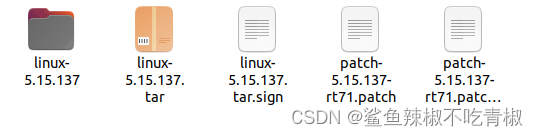
解压后文件
验证文件完整性(可选)
直接跳过就行,上面下载不会出啥问题的,都是在编译出错

跳过进行后续
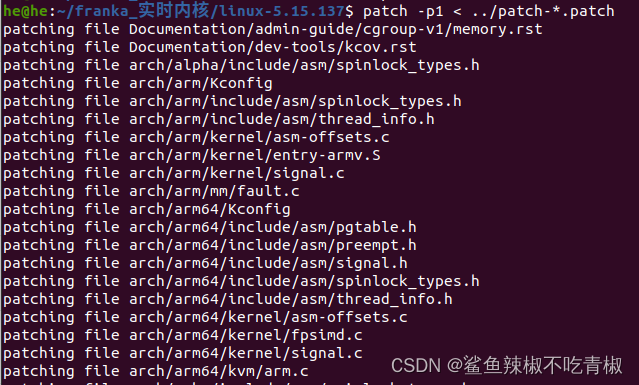
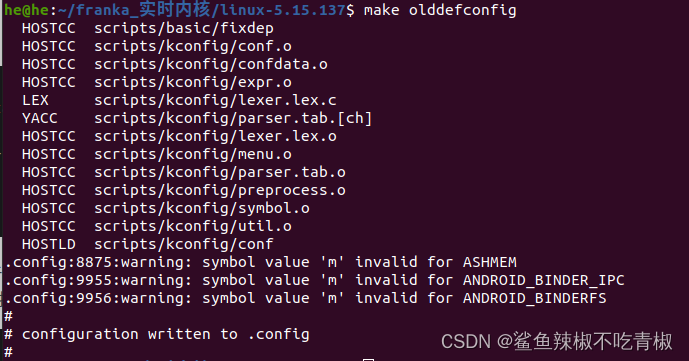
编译内核
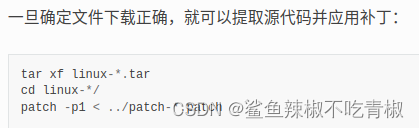
执行第一条指令

![]()
注意注意!!!
第三条从提示符中移除这个就是大概率出错的地方
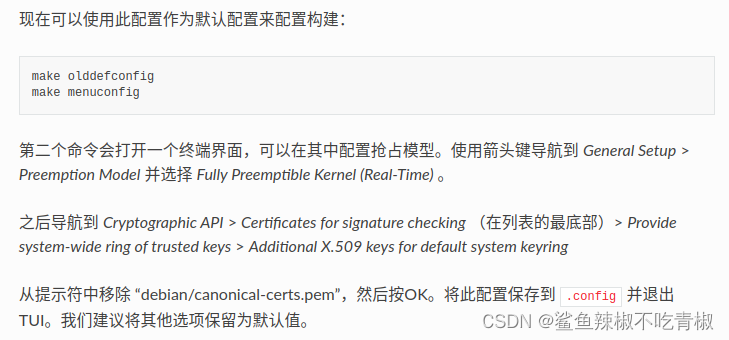
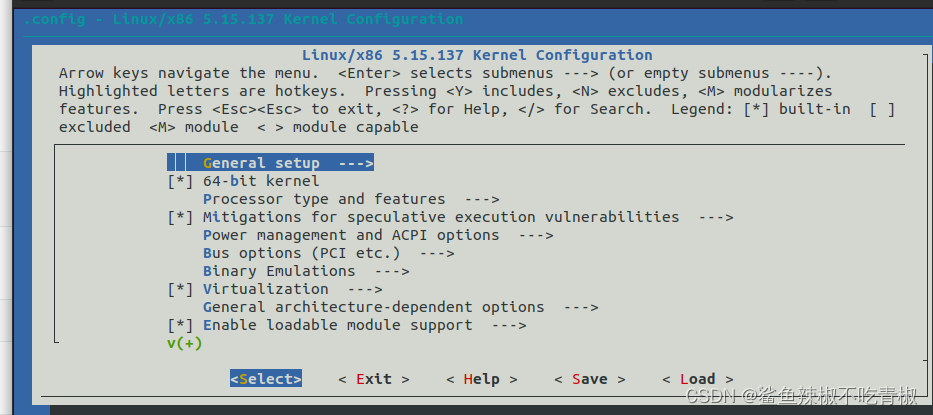
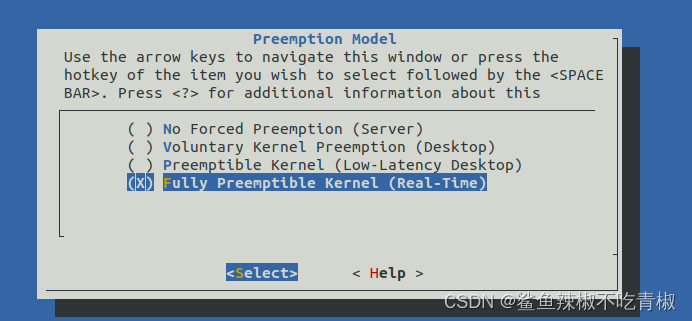
回车,进入新页面后寻找Preemption
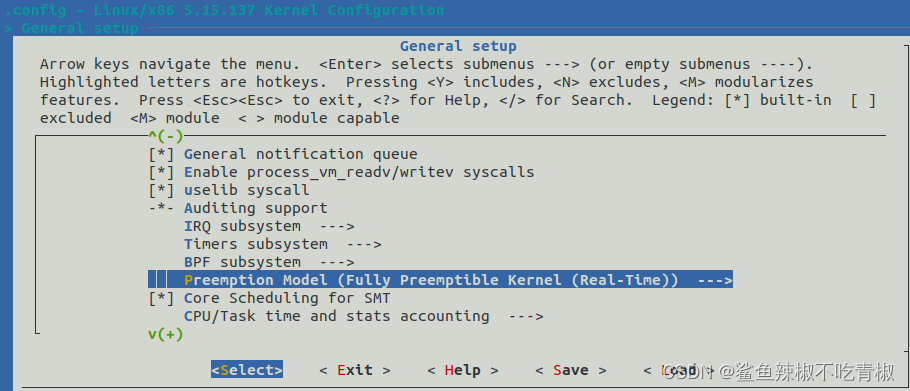
选中最下方real time 回车
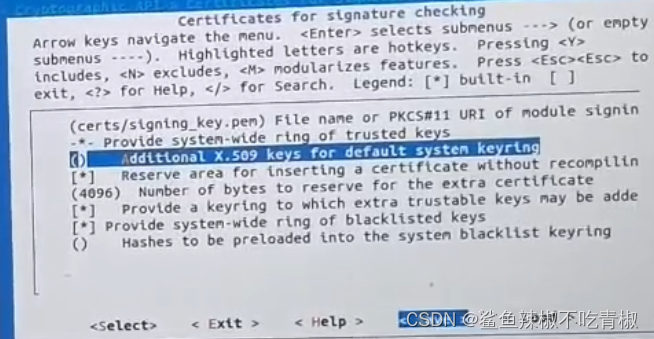
之后再选中exit回到最开始的界面,找到Cryptographic API
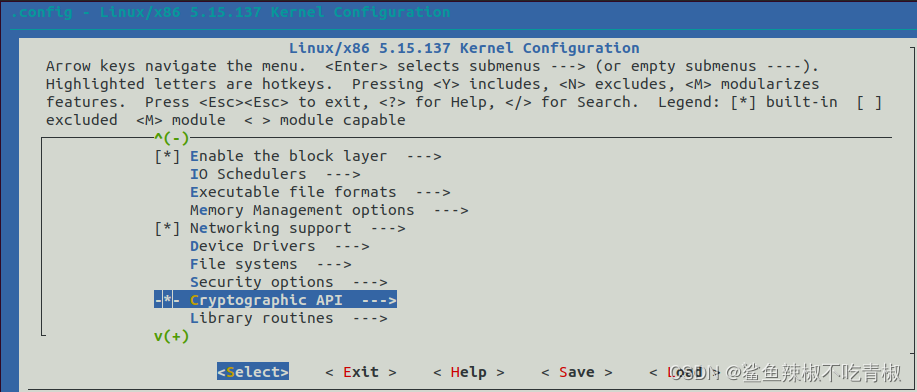
下面是可能出错的地方
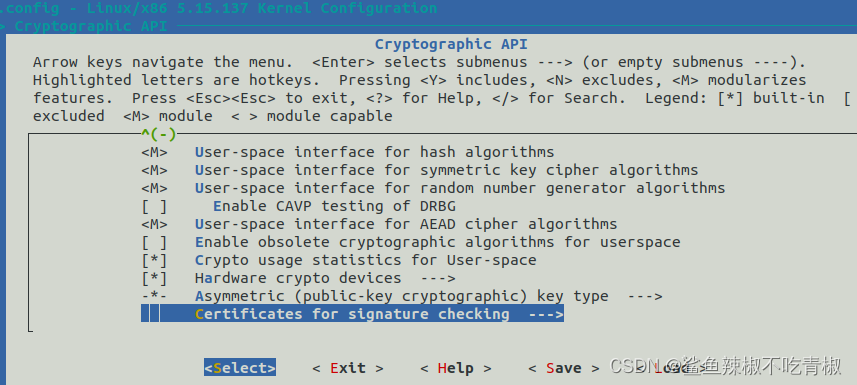
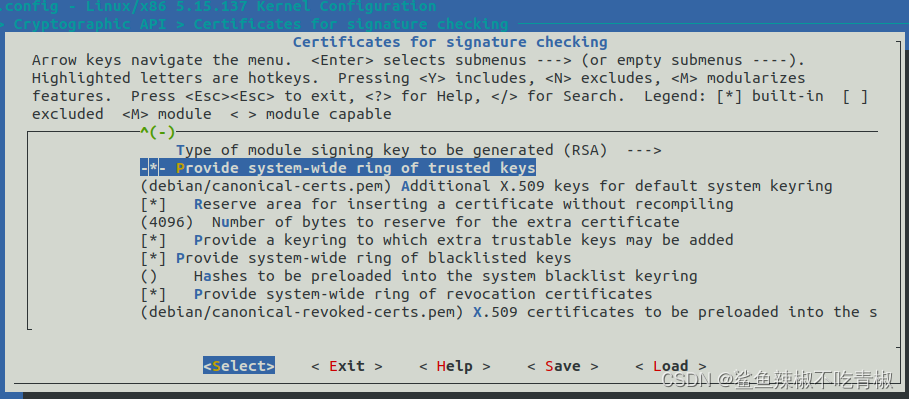
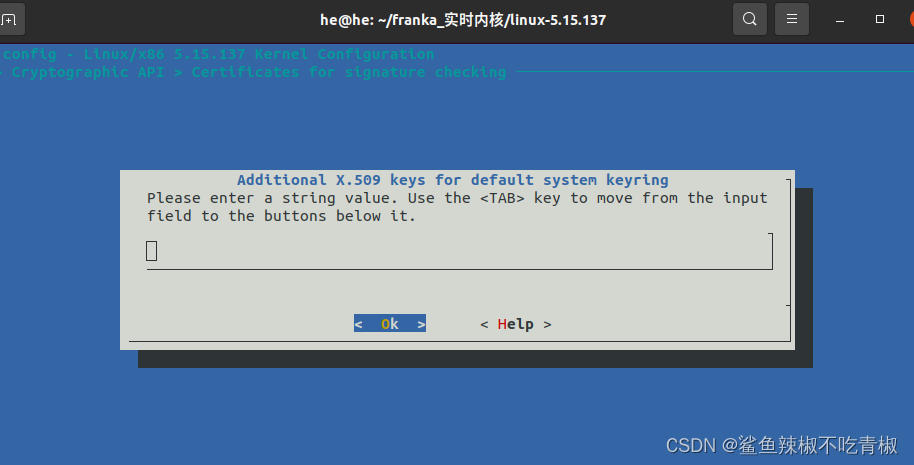
选中rovide system-wide ring of trusted keys 之后在下方的 Additional X.509 keys for default system keyring回车,删除原本的内容。
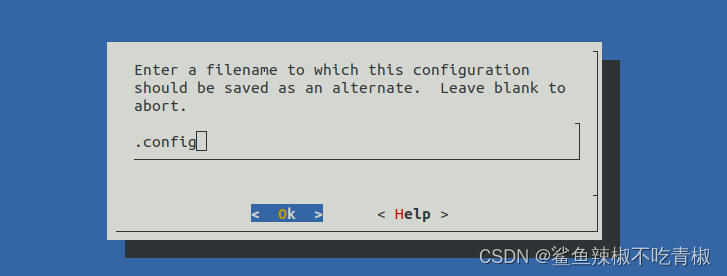
OK之后,在下方图片的界面用方向键右键选择save
再打开刚才删除的那个就看到 .config
完成之后一直选择exit退出
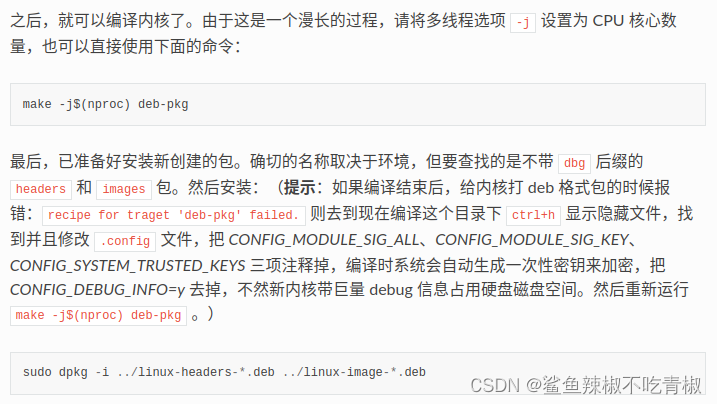
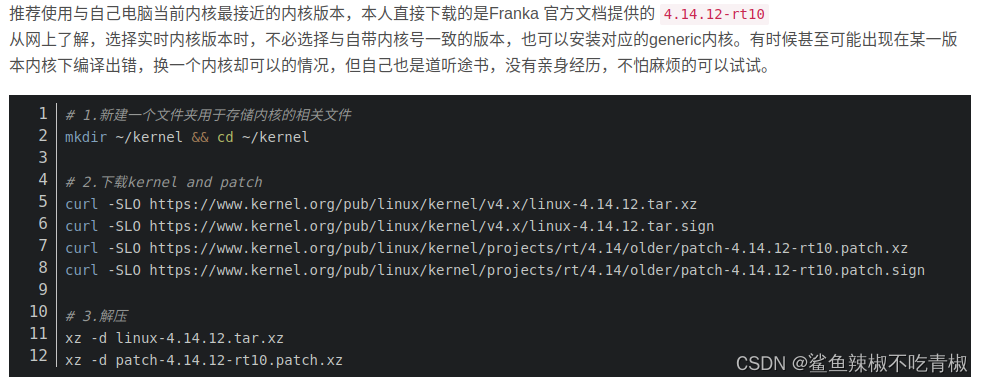
至于编译的内核什么的,直接用官方指令就行,没必要查电脑几核啥的,全部官方命令复制粘贴
编译花的时间较长,你可以去做些其他事情,编译通过,后续的都是小事
如果编译出错解决
因为作者的电脑上没有什么其他的重要资料,所以是直接重装,然后按照官方文档的指令来的,主要是在编译前先删完,在save然后再打开再OK,这个过程很多人不太理解容易出错。
我感觉出错的原因可能是内核的不匹配等,极其推荐就按官方指令的下载来!
如果你的电脑上又其他重要的文件,那就要去参考其他帖子来完成实时内核这部分了
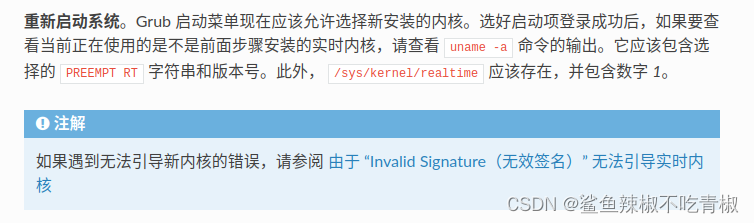
验证新内核
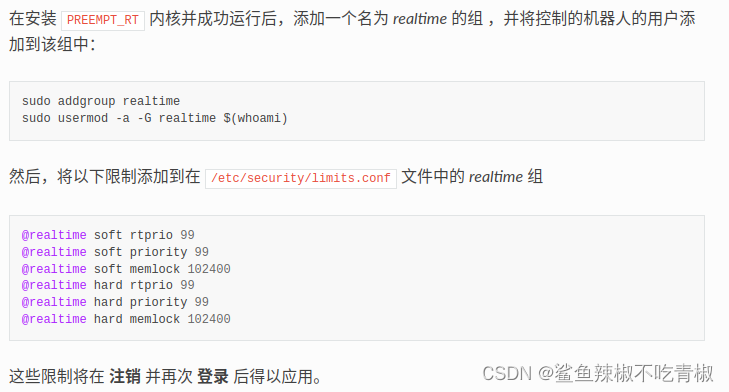
添加实时组许可















 1031
1031











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









