






20版本的ubuntu对应的ros版本为noetic
一、换源
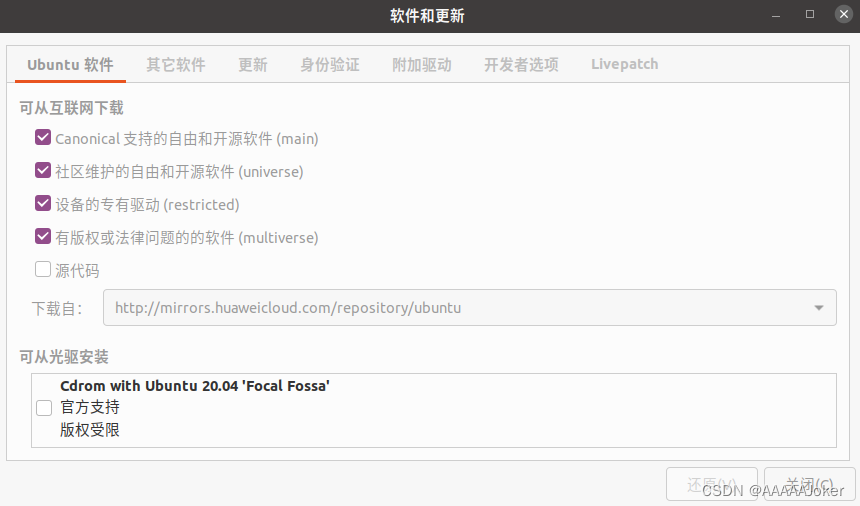
打开软件和更新,在下载自那选择其他
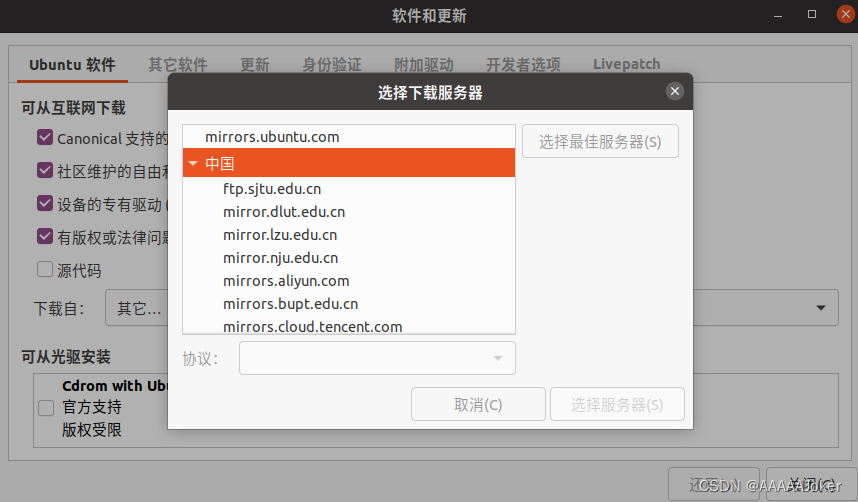
此处可以选择自己想要的源,我选择的是华为云。
二、添加ros软件源
终端输入:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'三、添加密钥
终端输入:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654四、更新软件源
终端输入:
sudo apt update五、安装ros
sudo apt install ros-noetic-desktop-full初始化rosdep,看是否安装成功
终端输入:
sudo rosdep init成功输出如下:

报错1:
sudo: rosdep:找不到命令
solution:终端输入:
sudo apt install python3-rosdep2报错2:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
solution:终端输入:
sudo gedit /etc/hosts在打开的文件后面输入:
185.199.111.133 raw.githubusercontent.com这个网址可能会更新变换,如果不行的话去raw.githubusercontent.com - GitHub: Let's build from here · GitHub
查看最新网址

报错3:
ERROR: default sources list file already exists:
/etc/ros/rosdep/sources.list.d/20-default.list
Please delete if you wish to re-initialize
solution:终端输入:
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list六、设置环境变量
终端输入:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
运行让环境变量生效:
source ~/.bashrc七、安装工具包
安装rosinstall:
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool安装roslaunch:
sudo apt install python3-roslaunch八、测试是否安装成功
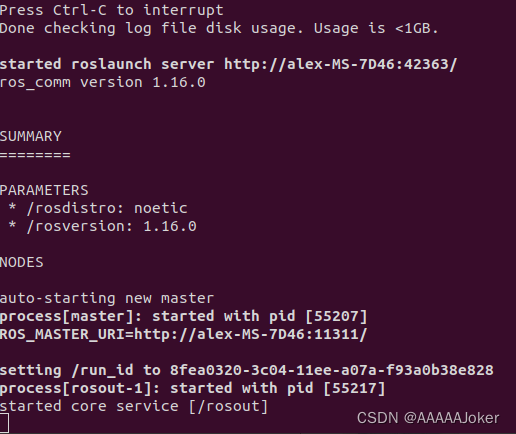
终端输入:
roscore成功界面如下:
若报错:
Resource not found: roslaunch
ROS path [0]=/opt/ros/noetic/share/ros
ROS path [1]=/opt/ros/noetic/share
The traceback for the exception was written to the log file

说明之前的安装没有安装全,终端输入 :
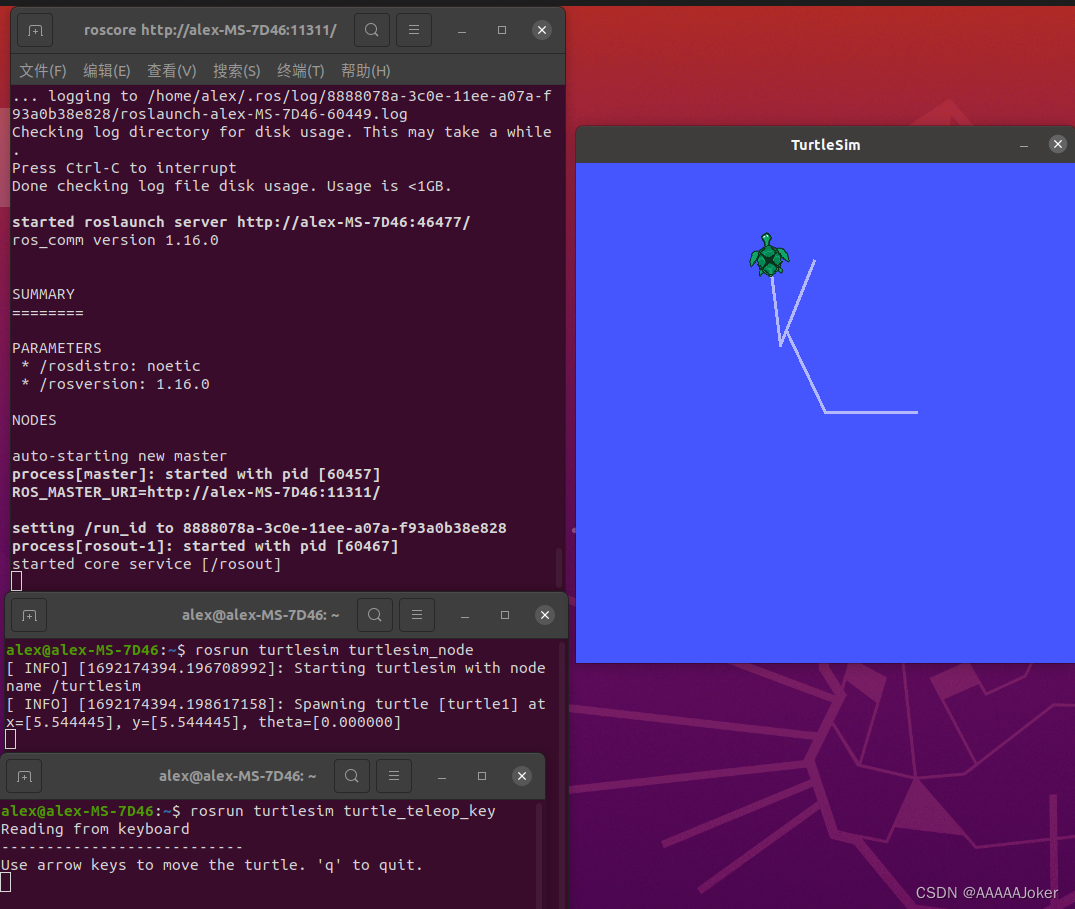
sudo apt install ros-noetic-desktop-full小海龟测试:
roscore开启的情况下,新开一个窗口输入:
rosrun turtlesim turtlesim_node
新开一个窗口输入:
rosrun turtlesim turtle_teleop_key
按键盘上的↑↓←→键可以控制小海龟移动














 553
553











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









