






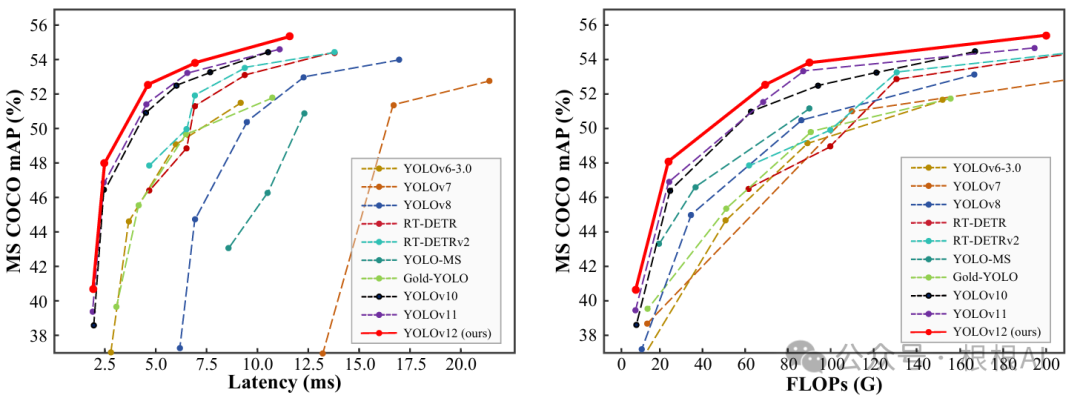
2025年2月19日,YOLOv12发布,YOLOv12与其它YOLO模型的对比如下:
论文地址:https://arxiv.org/pdf/2502.12524
代码地址:https://github.com/sunsmarterjie/yolov12
YOLOv12在继承YOLO系列高效性的同时,引入了注意力机制(attention mechanisms),显著提升了检测精度,同时保持了快速的推理速度。YOLOv12通过一系列创新的设计和架构改进,打破了传统卷积神经网络(CNN)在YOLO系列中的主导地位,证明了注意力机制在实时目标检测中的潜力。
YOLOv12的主要贡献包括:
-
提出了一种以注意力为中心的YOLO框架,通过方法论创新和架构改进,打破了CNN在YOLO系列中的主导地位。
-
在不依赖额外预训练技术的情况下,YOLOv12实现了更快的推理速度和更高的检测精度,展现出其在实时目标检测中的潜力。
1 Area Attention
YOLOv12提出了一种名为“Area Attention”的注意力机制,将注意力分解为水平和垂直两个方向。

A2模块代码实现如下:
class AAttn(nn.Module):
"""
Area-attention module with the requirement of flash attention.
Attributes:
dim (int): Number of hidden channels;
num_heads (int): Number of heads into which the attention mechanism is divided;
area (int, optional): Number of areas the feature map is divided. Defaults to 1.
Methods:
forward: Performs a forward process of input tensor and outputs a tensor after the execution of the area attention mechanism.
Examples:
>>> import torch
>>> from ultralytics.nn.modules import AAttn
>>> model = AAttn(dim=64, num_heads=2, area=4)
>>> x = torch.randn(2, 64, 128, 128)
>>> output = model(x)
>>> print(output.shape)
Notes:
recommend that dim//num_heads be a multiple of 32 or 64.
"""
def __init__(self, dim, num_heads, area=1):
"""Initializes the area-attention module, a simple yet efficient attention module for YOLO."""
super().__init__()
self.area = area
self.num_heads = num_heads
self.head_dim = head_dim = dim // num_heads
all_head_dim = head_dim * self.num_heads
self.qkv = Conv(dim, all_head_dim * 3, 1, act=False)
self.proj = Conv(all_head_dim, dim, 1, act=False)
self.pe = Conv(all_head_dim, dim, 7, 1, 3, g=dim, act=False)
def forward(self, x):
"""Processes the input tensor 'x' through the area-attention"""
B, C, H, W = x.shape
N = H * W
qkv = self.qkv(x).flatten(2).transpose(1, 2)
if self.area > 1:
qkv = qkv.reshape(B * self.area, N // self.area, C * 3)
B, N, _ = qkv.shape
q, k, v = qkv.view(B, N, self.num_heads, self.head_dim * 3).split(
[self.head_dim, self.head_dim, self.head_dim], dim=3
)
if x.is_cuda:
x = flash_attn_func(
q.contiguous().half(),
k.contiguous().half(),
v.contiguous().half()
).to(q.dtype)
else:
q = q.permute(0, 2, 3, 1)
k = k.permute(0, 2, 3, 1)
v = v.permute(0, 2, 3, 1)
attn = (q.transpose(-2, -1) @ k) * (self.head_dim ** -0.5)
max_attn = attn.max(dim=-1, keepdim=True).values
exp_attn = torch.exp(attn - max_attn)
attn = exp_attn / exp_attn.sum(dim=-1, keepdim=True)
x = (v @ attn.transpose(-2, -1))
x = x.permute(0, 3, 1, 2)
v = v.permute(0, 3, 1, 2)
if self.area > 1:
x = x.reshape(B // self.area, N * self.area, C)
v = v.reshape(B // self.area, N * self.area, C)
B, N, _ = x.shape
x = x.reshape(B, H, W, C).permute(0, 3, 1, 2)
v = v.reshape(B, H, W, C).permute(0, 3, 1, 2)
x = x + self.pe(v)
x = self.proj(x)
return x
class ABlock(nn.Module):
"""
ABlock class implementing a Area-Attention block with effective feature extraction.
This class encapsulates the functionality for applying multi-head attention with feature map are dividing into areas
and feed-forward neural network layers.
Attributes:
dim (int): Number of hidden channels;
num_heads (int): Number of heads into which the attention mechanism is divided;
mlp_ratio (float, optional): MLP expansion ratio (or MLP hidden dimension ratio). Defaults to 1.2;
area (int, optional): Number of areas the feature map is divided. Defaults to 1.
Methods:
forward: Performs a forward pass through the ABlock, applying area-attention and feed-forward layers.
Examples:
Create a ABlock and perform a forward pass
>>> model = ABlock(dim=64, num_heads=2, mlp_ratio=1.2, area=4)
>>> x = torch.randn(2, 64, 128, 128)
>>> output = model(x)
>>> print(output.shape)
Notes:
recommend that dim//num_heads be a multiple of 32 or 64.
"""
def __init__(self, dim, num_heads, mlp_ratio=1.2, area=1):
"""Initializes the ABlock with area-attention and feed-forward layers for faster feature extraction."""
super().__init__()
self.attn = AAttn(dim, num_heads=num_heads, area=area)
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = nn.Sequential(Conv(dim, mlp_hidden_dim, 1), Conv(mlp_hidden_dim, dim, 1, act=False))
self.apply(self._init_weights)
def _init_weights(self, m):
"""Initialize weights using a truncated normal distribution."""
if isinstance(m, nn.Conv2d):
trunc_normal_(m.weight, std=.02)
if isinstance(m, nn.Conv2d) and m.bias is not None:
nn.init.constant_(m.bias, 0)
def forward(self, x):
"""Executes a forward pass through ABlock, applying area-attention and feed-forward layers to the input tensor."""
x = x + self.attn(x)
x = x + self.mlp(x)
return x
2 R-ELAN
并利用Area Attention(A2)作为主要的特征提取模块,提出了R-ELAN。
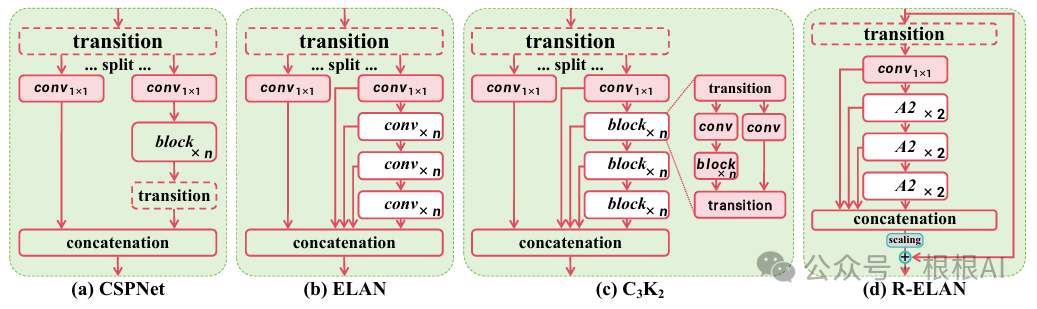
R-ELAN代码实现如下:
我们发现,并非所有的特征提取模块都替换为了A2C2f,而是在较小的尺度上使用A2C2f,这可能是出于时间复杂度的考虑,在大的尺度上使用A2C2f,将会很大程度的增加计算量。
class A2C2f(nn.Module):
"""
A2C2f module with residual enhanced feature extraction using ABlock blocks with area-attention. Also known as R-ELAN
This class extends the C2f module by incorporating ABlock blocks for fast attention mechanisms and feature extraction.
Attributes:
c1 (int): Number of input channels;
c2 (int): Number of output channels;
n (int, optional): Number of 2xABlock modules to stack. Defaults to 1;
a2 (bool, optional): Whether use area-attention. Defaults to True;
area (int, optional): Number of areas the feature map is divided. Defaults to 1;
residual (bool, optional): Whether use the residual (with layer scale). Defaults to False;
mlp_ratio (float, optional): MLP expansion ratio (or MLP hidden dimension ratio). Defaults to 1.2;
e (float, optional): Expansion ratio for R-ELAN modules. Defaults to 0.5.
g (int, optional): Number of groups for grouped convolution. Defaults to 1;
shortcut (bool, optional): Whether to use shortcut connection. Defaults to True;
Methods:
forward: Performs a forward pass through the A2C2f module.
Examples:
>>> import torch
>>> from ultralytics.nn.modules import A2C2f
>>> model = A2C2f(c1=64, c2=64, n=2, a2=True, area=4, residual=True, e=0.5)
>>> x = torch.randn(2, 64, 128, 128)
>>> output = model(x)
>>> print(output.shape)
"""
def __init__(self, c1, c2, n=1, a2=True, area=1, residual=False, mlp_ratio=2.0, e=0.5, g=1, shortcut=True):
super().__init__()
c_ = int(c2 * e) # hidden channels
assert c_ % 32 == 0, "Dimension of ABlock be a multiple of 32."
# num_heads = c_ // 64 if c_ // 64 >= 2 else c_ // 32
num_heads = c_ // 32
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv((1 + n) * c_, c2, 1) # optional act=FReLU(c2)
init_values = 0.01 # or smaller
self.gamma = nn.Parameter(init_values * torch.ones((c2)), requires_grad=True) if a2 and residual else None
self.m = nn.ModuleList(
nn.Sequential(*(ABlock(c_, num_heads, mlp_ratio, area) for _ in range(2))) if a2 else C3k(c_, c_, 2, shortcut, g) for _ in range(n)
)
def forward(self, x):
"""Forward pass through R-ELAN layer."""
y = [self.cv1(x)]
y.extend(m(y[-1]) for m in self.m)
if self.gamma is not None:
return x + (self.gamma * self.cv2(torch.cat(y, 1)).permute(0, 2, 3, 1)).permute(0, 3, 1, 2)
return self.cv2(torch.cat(y, 1))YOLOv12的模型结构如下:
# YOLOv12 🚀, AGPL-3.0 license
# YOLOv12 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov12n.yaml' will call yolov12.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 465 layers, 2,603,056 parameters, 2,603,040 gradients, 6.7 GFLOPs
s: [0.50, 0.50, 1024] # summary: 465 layers, 9,285,632 parameters, 9,285,616 gradients, 21.7 GFLOPs
m: [0.50, 1.00, 512] # summary: 501 layers, 20,201,216 parameters, 20,201,200 gradients, 68.1 GFLOPs
l: [1.00, 1.00, 512] # summary: 831 layers, 26,454,880 parameters, 26,454,864 gradients, 89.7 GFLOPs
x: [1.00, 1.50, 512] # summary: 831 layers, 59,216,928 parameters, 59,216,912 gradients, 200.3 GFLOPs
# YOLO12n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 2, C3k2, [256, False, 0.25]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 2, C3k2, [512, False, 0.25]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 4, A2C2f, [512, True, 4]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 4, A2C2f, [1024, True, 1]] # 8
# YOLO12n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 2, A2C2f, [512, False, -1]] # 11
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 2, A2C2f, [256, False, -1]] # 14
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 11], 1, Concat, [1]] # cat head P4
- [-1, 2, A2C2f, [512, False, -1]] # 17
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 8], 1, Concat, [1]] # cat head P5
- [-1, 2, C3k2, [1024, True]] # 20 (P5/32-large)
- [[14, 17, 20], 1, Detect, [nc]] # Detect(P3, P4, P5)可以发现,并非所有的特征提取模块都替换为了A2C2f,而是在较小的尺度上使用A2C2f,这可能是出于时间复杂度的考虑,在大的尺度上使用A2C2f,将会很大程度的增加计算量。
3 对比实验
以下是YOLOv12与其它几个版本YOLO的对比。
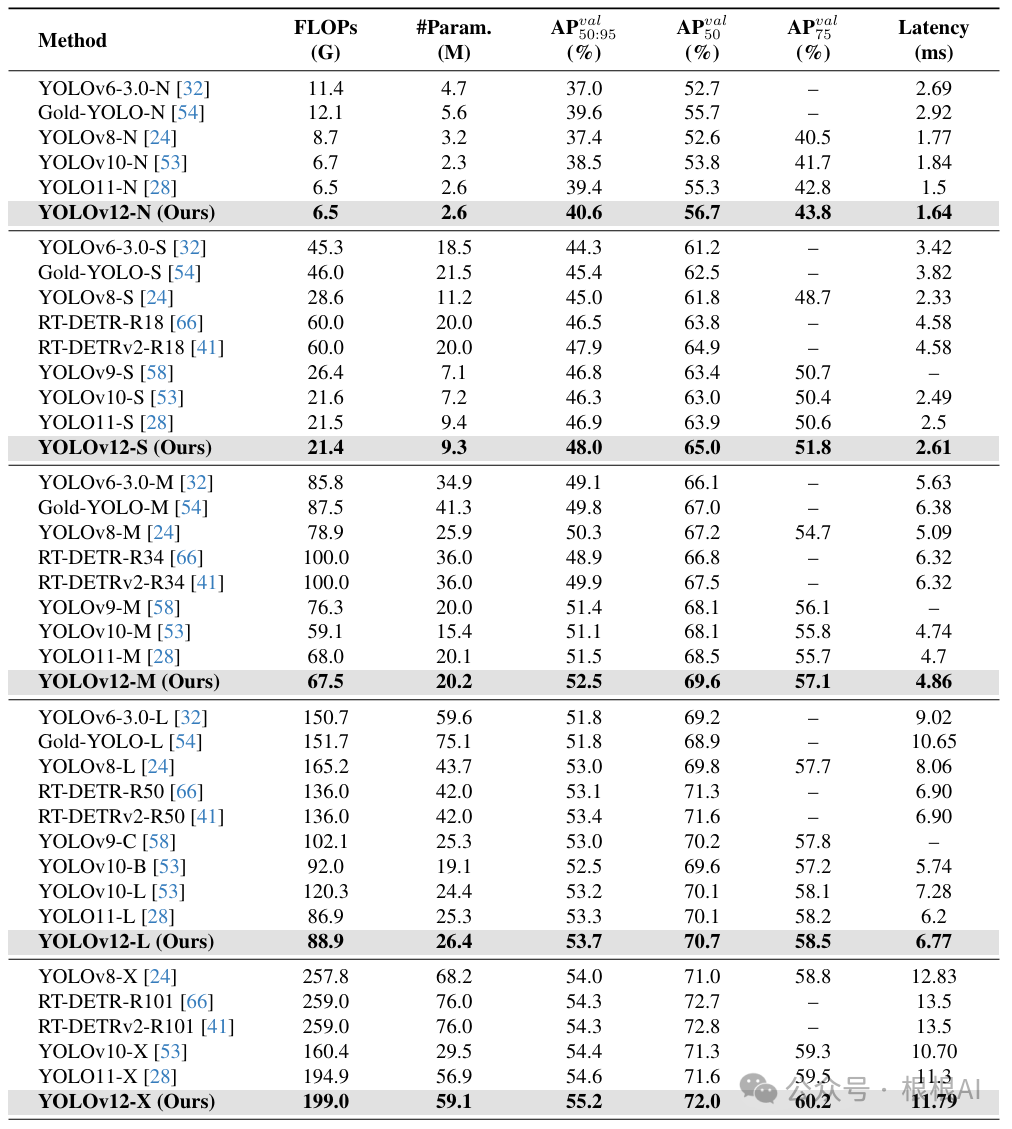
可以发现,YOLOv12在AP上达到了YOLO模型的最佳水平。美中不足的是,YOLO12在推理速度上略低于YOLO11模型,但零点几毫秒的延迟几乎可以忽略不记。
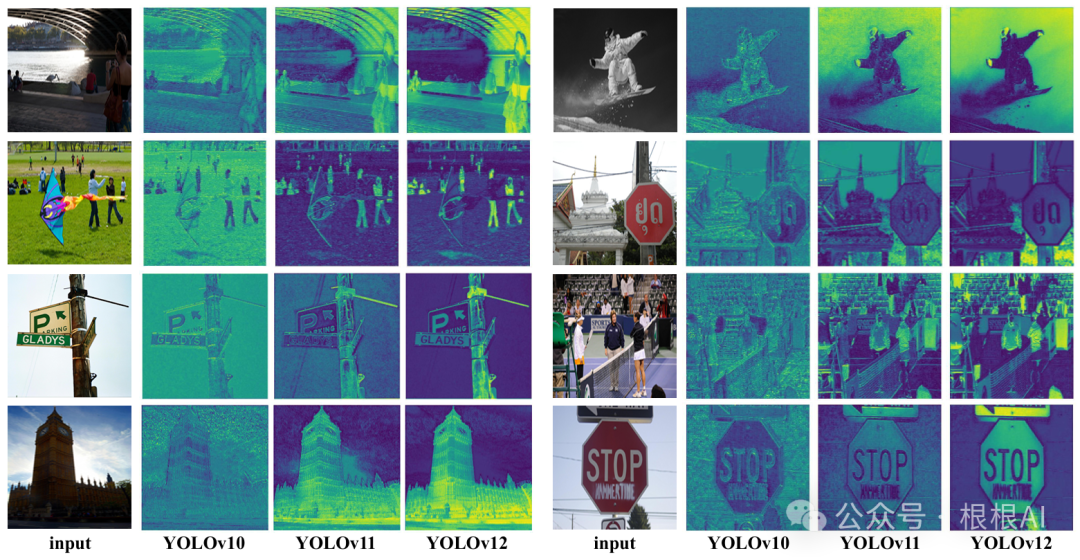
论文还对不同模型的特征图做了可视化,YOLOv12的注意力能够更加有效地保持目标的特征。
YOLOv12成功地将注意力机制引入实时目标检测框架,通过Area Attention、R-ELAN和架构优化等创新设计,实现了精度与效率的双重提升。该研究不仅挑战了CNN在YOLO系列中的主导地位,还为未来实时目标检测的发展提供了新的方向。


















 1487
1487

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











