







From : https://www.zhihu.com/people/aili-light/posts
1 L2-L4自动驾驶视觉方案推荐
(一) https://zhuanlan.zhihu.com/p/475817226
(二) https://zhuanlan.zhihu.com/p/475832413
2 CMOS图像传感器的参数和评价标准
https://zhuanlan.zhihu.com/p/480707847
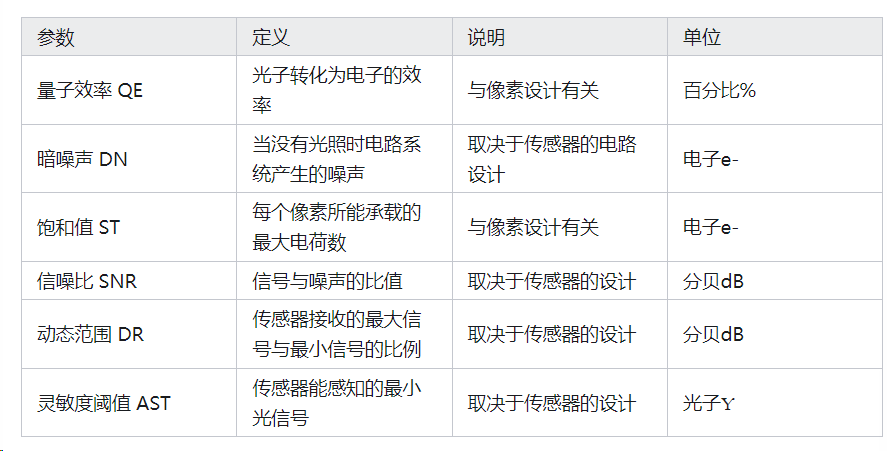
EMVA(European Machine Vision Association)1288(图1)是专为相机图像传感器的测试而设计的标准。该标准定义了一系列的参数以及规范化的测量方法,例如量子效率、动态范围、灵敏度等等。
(1) 电信号的生成
- 量子效率 QE
(2) 噪声来源
- 固定噪声
- 暂态噪声 具有一定的随机性,例如暗噪声、采样噪声等
- 暗噪声
- 信噪比
- 灵敏度阈值
- 动态范围
- 固定模式噪声
- 信号不一致性带来的偏置(offset)
- 光响应非均匀性引起的灵敏度(sensitivity)差异。
- 总结
3 详解图像传感器的测试标准EMVA1288
Ref : https://zhuanlan.zhihu.com/p/476543135
- 量子效率 对绿光(波长550nm)的量子效率最高
- **暗噪声DN ** 温度升高,暗噪声随之升高
- 灵敏度阈值AST(Absolute Sensitivity Threshold) 小可检测的信号强度
- 饱和值(Saturation Capacity) 电容的大小限制了最多能接收的光强度。
- 当其中某个像素的光电二极管饱和之后,多余的电子容易溢出,影响其他的像素,从而产生拖尾效应
- 信噪比(SNR) 更高的信噪比,意味着图像的对比度更清晰,在暗光环境下的性能更好
- 动态范围(Dynamic Range) 越高的动态范围意味着相机越能同时适应暗光以及亮光的场景。
- 增益 会同时增大信号和噪声,并不是越大越好

4 车载摄像头选型指南
https://zhuanlan.zhihu.com/p/482828614
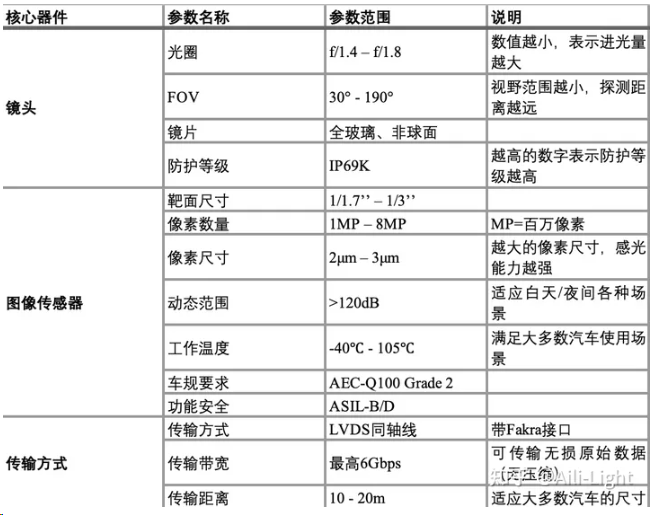
摄像头的核心器件组成
(1) Lens
- 镜头材质:光学玻璃|普通玻璃 \ 塑胶
- 镜片类型:球面 / 非球面
- 光圈和FOV:
- 光圈 = f/D 光圈越小进光量大 一般 f/1.5 (光圈值=1.5)
- FOV

- 防护等级:IEC60529-2001制定的,通常以IP+XY表示,XY越大的数字表示防护等级高
- IP69K 受高压水枪冲击,在高温蒸汽下不会起雾等等

(2) Sensors
CCD和CMOS的区别:
https://zhuanlan.zhihu.com/p/653647188
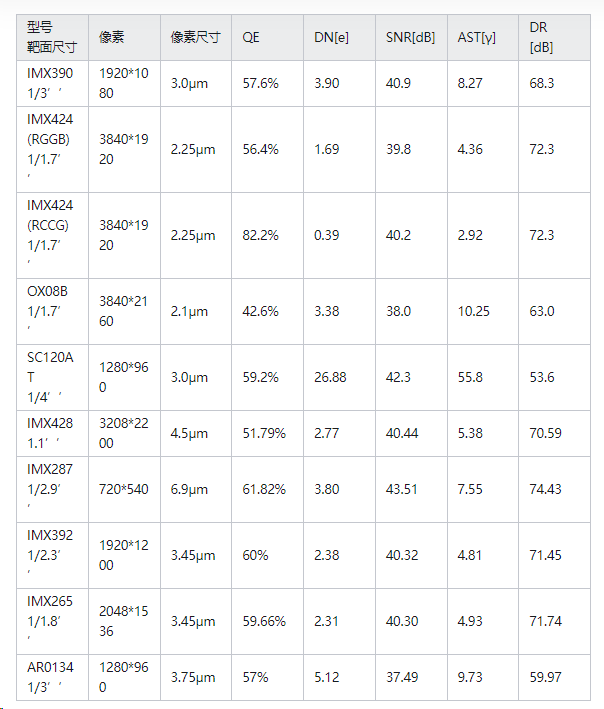
- 靶面大小、像素数量、像素尺寸等。
载应用上,为了有更高的动态范围和更好的暗光性能,通常会选用像素尺寸更大的,例如3μm的CMOS传感器,但是像素的数量更少,例如8百万像素(3840 x 2160)。
- 感光能力
《详解图像传感器的测试标准EMVA1288》:
- 灵敏度、红外感光
- HDR 动态范围

3db = 2倍 10db = 10 倍 | -3db = 1/2 -10db = 1/10
可见dB是个相对值,它的使命就是把一个很大或者很小的数,用一个简短的形式表达出来。
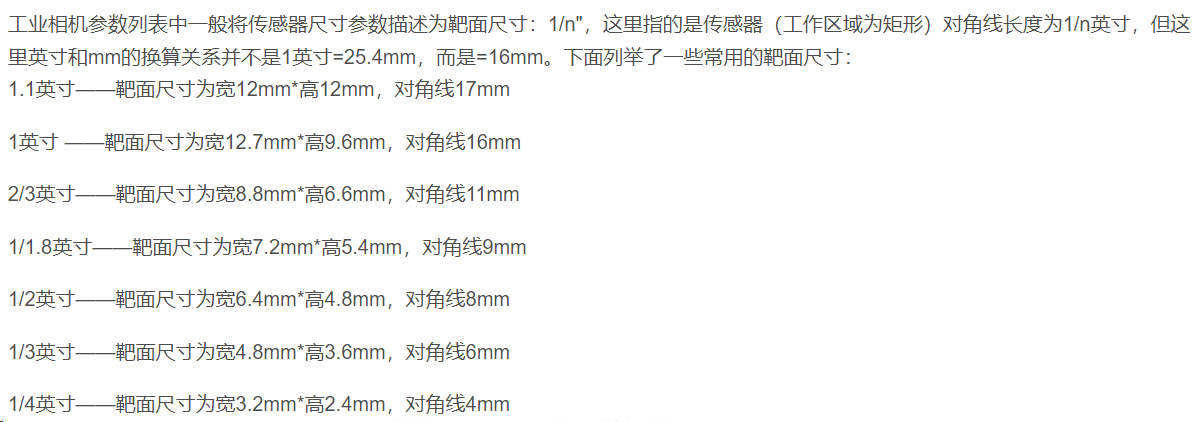
- 靶面尺寸
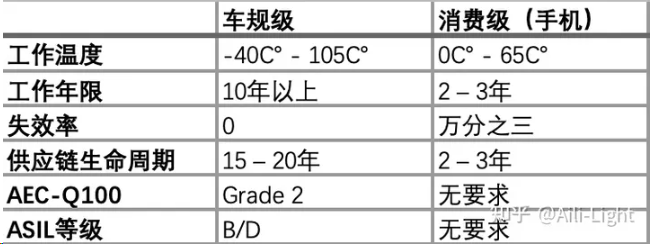
- 车规要求
- AEC(Automotive Electronics Council)制定了针对汽车行业零部件的标准AEC-Q100。
- ISO 26262 标准,即针对道路车辆的功能安全的风险分类系统ASIL(Automotive Safety Integration Level)的要求
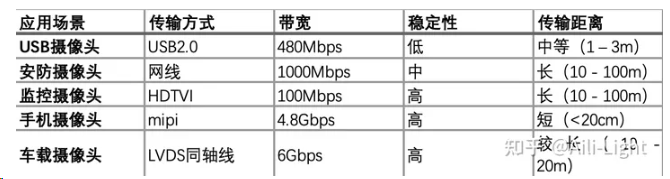
(3) 数据传输
- 传统传输方式
- USB
- 网线
- HD-TVI
- LVDS同轴线 : 都是通过 串行器 - 解串器
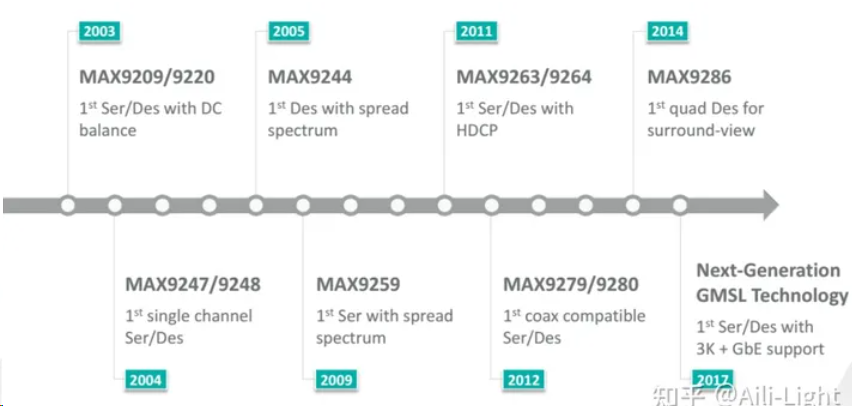
- TI - FPD-Link
- Maxim - GMSL
(4) 总结
(x.1) Inter Content
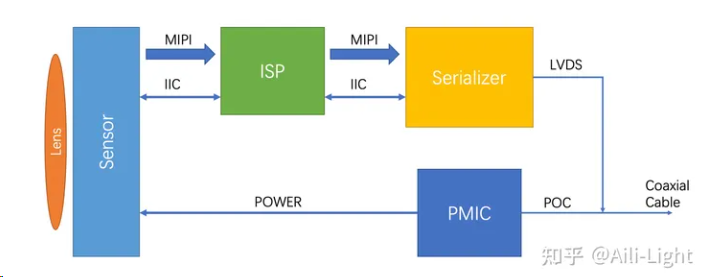
MIPI:
MIPI APHY 替代后两种 || CPHY DPHY
A-PHY的目标是为远程汽车创建一个单一的标准化解决方案,该解决方案可直接有效地承载MIPI CSI-2和DSI-2协议。
https://zhuanlan.zhihu.com/p/228711058
IIC:
PMIC : 电源管理芯片
POC : Power Over Coaxial 同轴供电技术
LVDS :
(x.2) 2MP、1080P、4K、8K
名词概念解释:
https://www.isolves.com/sh/yl/2020-07-07/23021.html
(x.3) db dbm dbi
ref : https://zhuanlan.zhihu.com/p/383568238
3db = 2倍 10db = 10 倍 | -3db = 1/2 -10db = 1/10
可见dB是个相对值,它的使命就是把一个很大或者很小的数,用一个简短的形式表达出来。
5 GMSL高带宽数据接入的方法
https://zhuanlan.zhihu.com/p/497871767
- GMSL介绍
- GMSL串行器-解串器

- GMSL数据接入方式
- 以Jetson Xavier平台为例:
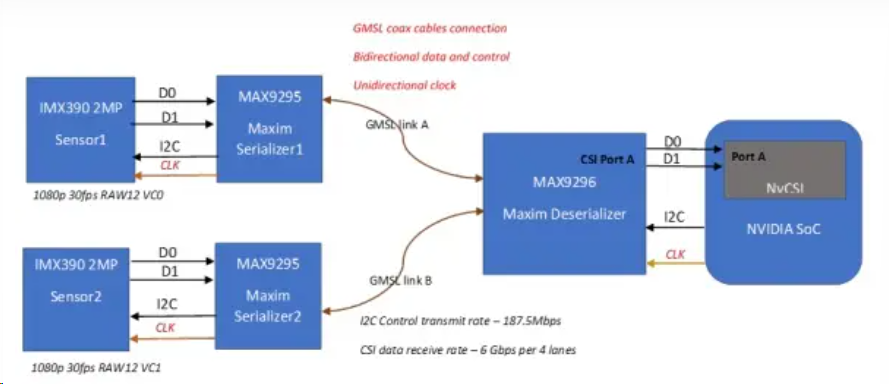
Jetson Xavier为代表的Arm架构下的SoC系统,通常没有直接的GMSL接口,而是提供MIPI信号接口,因此需要通过外挂解串板的方式来实现,以下方的配置为例介绍。
摄像头包含Sensor(IMX390)和串行器(MAX9295),两路摄像头通过GMSL Link同轴线(Coax Cable)连接到转接板(MAX9296 Deserializer Board),转接板再通过排线(MIPI White Cable)接入到Jetson Xavier开发板的CSI Port。
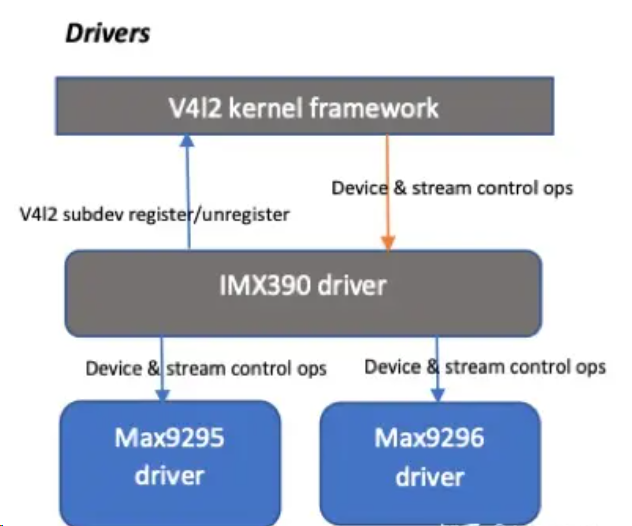
- 驱动
- 工控机 PCIE采集卡
6 车载Sensor上的ISP调试
https://zhuanlan.zhihu.com/p/606152111
于目前前装量产中比较热门的两款视觉模组ISX031和OX08B

7 自动驾驶系统视觉传感器的同步和时延的细节讨论(重点)
https://zhuanlan.zhihu.com/p/606164797



















 1249
1249

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











