







数据可视化是一个大问题🌶️:通过使用视觉元素对信息进行图形表示,我们可以最好地呈现和理解数据中的趋势、异常值和模式。你猜对了:使用代表真实世界形状的 3D 点云数据集,这是强制性的 🙂。
本文处理和可视化无人机 3D 点云。你将在实时可视化和创建动画的同时学习特征提取、交互式和自动分割
但是,当从激光扫描仪或摄影测量等 3D 重建技术收集时,点云通常过于密集,无法进行经典渲染。在许多情况下,数据集将远远超过 1000 万大关,这使得它们对于 Matplotlib 等经典可视化库来说不切实际。
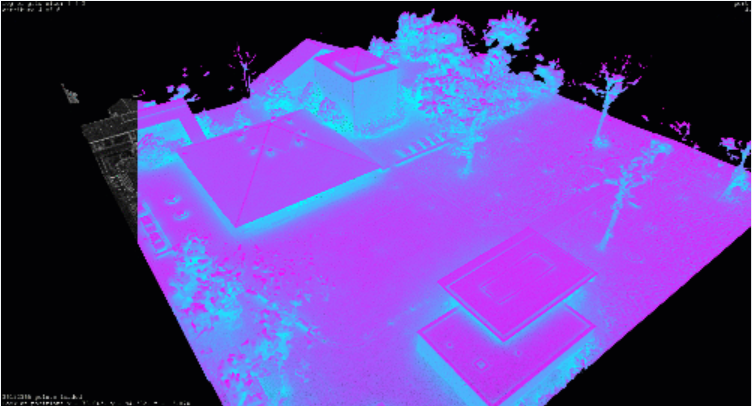
你可以注意到,左侧(Open3D)与右侧(PPTK)相比速度有多慢,PPTK 使用八叉树结构来加速可视化。Matplotlib 会更糟😅。
这意味着我们经常需要跳出 Python 脚本(因此使用 I/O 函数将数据写入文件)并在外部进行可视化,这可能会成为一个非常繁琐的过程🤯。我不会撒谎,这几乎就是我在论文第一年所做的,试图猜测特定算法的结果🥴。
直接在脚本中可视化这些点云不是很棒吗?更好的是,将视觉反馈连接到脚本?想象一下,现在 iPhone 12 Pro 配备了 LiDAR;你可以创建一个完整的在线应用程序!好消息,有一种方法可以实现这一点,而无需离开舒适的 Python 环境和 IDE。☕ 准备好了吗?
NSDT工具推荐: Three.js AI纹理开发包 - YOLO合成数据生成器 - GLTF/GLB在线编辑 - 3D模型格式在线转换 - 可编程3D场景编辑器 - REVIT导出3D模型插件 - 3D模型语义搜索引擎 - AI模型在线查看 - Three.js虚拟轴心开发包 - 3D模型在线减面 - STL模型在线切割 - 3D道路快速建模
1、启动你的 Python 环境
在上一篇文章中,我们了解了如何使用 Anaconda 轻松设置环境以及如何使用 IDE Spyder 管理代码。如果你打算成为一名成熟的 Python 应用程序开发人员,我建议您继续以这种方式学习 😆。
如果你使用的是 Jupyter Notebook 或 Google Colab,脚本可能需要进行一些调整才能使可视化后端工作,但性能不稳定。如果你想继续使用这些 IDE,我建议你查看步骤 4 中给出的所选库的替代方案。
2、下载点云数据集
我在之前的教程中说明了使用摄影测量和来自 Open Topography 的航空 LiDAR 获得的 3D 数据集的点云处理和网格划分。我将跳过下文中介绍的有关 LiDAR I/O 的详细信息,直接跳转到使用高效的 .las 文件格式。
只是这一次,我们将使用空中无人机数据集。它是通过摄影测量获得的,让一架小型 DJI Phantom Pro 4 在我们的大学校园里飞行,收集一些图像并运行摄影测量重建,如此处所述。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 252
252

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









