







 ROS中的nav_msgs/Odometry消息用于表示里程计信息,包括位置和姿态。通过订阅该话题,转换为geometry_msgs/PoseStamped对象,再存储到nav_msgs/Path中发布,可以在rviz中实现轨迹的3D可视化。具体步骤包括创建ROS工作空间、编写节点文件、配置CMakeLists.txt、编译功能包和启动节点。
ROS中的nav_msgs/Odometry消息用于表示里程计信息,包括位置和姿态。通过订阅该话题,转换为geometry_msgs/PoseStamped对象,再存储到nav_msgs/Path中发布,可以在rviz中实现轨迹的3D可视化。具体步骤包括创建ROS工作空间、编写节点文件、配置CMakeLists.txt、编译功能包和启动节点。
ROS中里程计的消息类型为nav_msgs/Odometry,该消息类型具有以下结构:
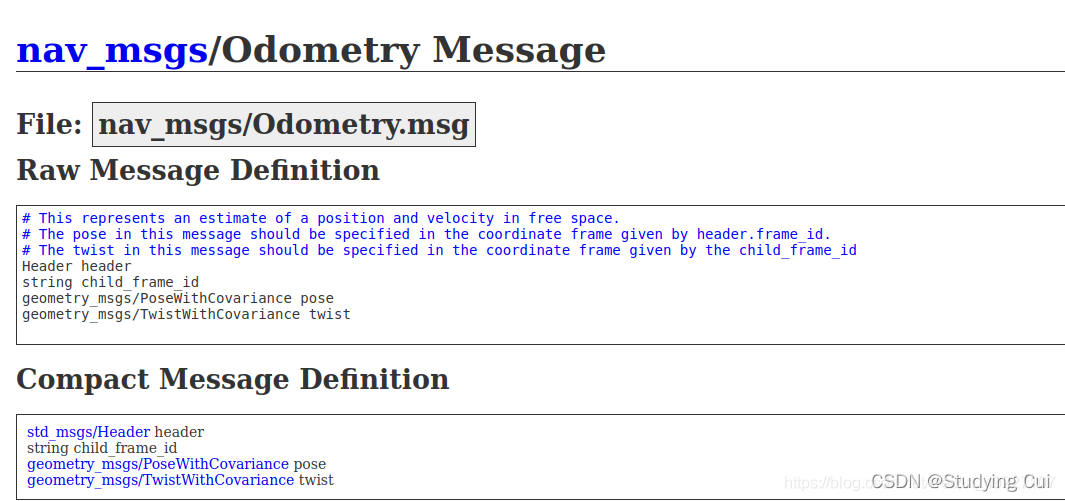
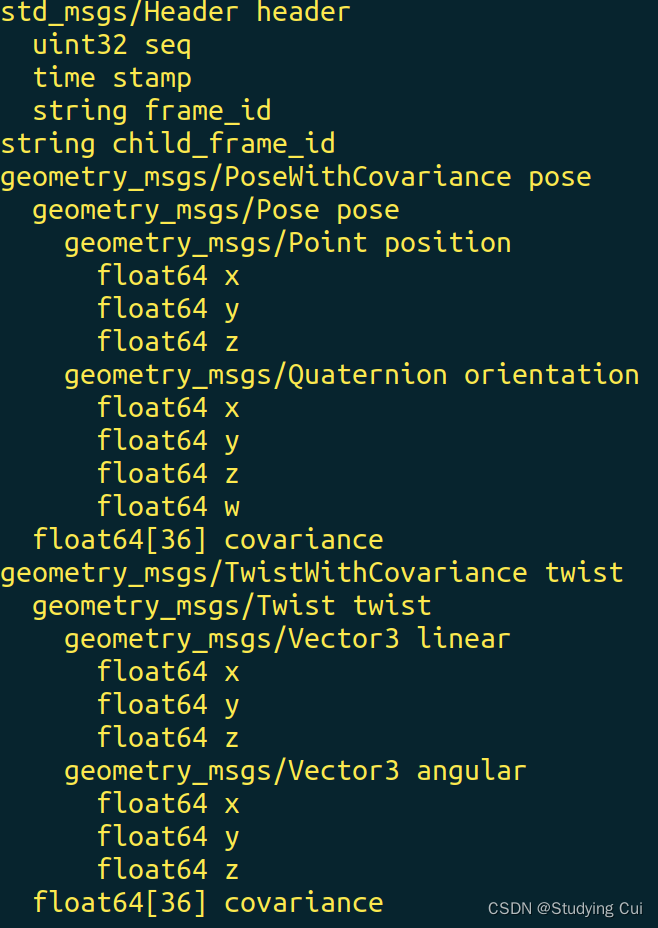
可以看到,里程计消息中的pose包含了位置pose.position和姿态pose.orientation
在ROS中,有一种常用消息类型为nav_msgs/Path,可视化的方法为:
①在一个节点中订阅发布的里程计话题消息nav_msgs/Odometry
②创建geometry_msgs::PoseStamped对象接收里程计的位姿
③创建nav_msgs/Path对象作为容器,将赋值后的对象push_back进nav_msgs/Path中并发布
然后即可在rviz中订阅包含nav_msgs/Path的话题并可视化轨迹
1.新建ROS工作空间
mkdir -p path_ws/src
cd path_ws
catkin_make
cd src
catkin_create_pkg path_3d roscpp rospy std_msgs nav_msg 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2410
2410

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











