







导航功能包要求机器人 能够通过里程计信息源发布包含速度信息的里程计nav_msgs/Odometry 消息;
本篇整理了nav_msgs/Odometry消息的具体结构,更加清晰一点,以及如果订阅这种类型的topic时应该如何获取数据;
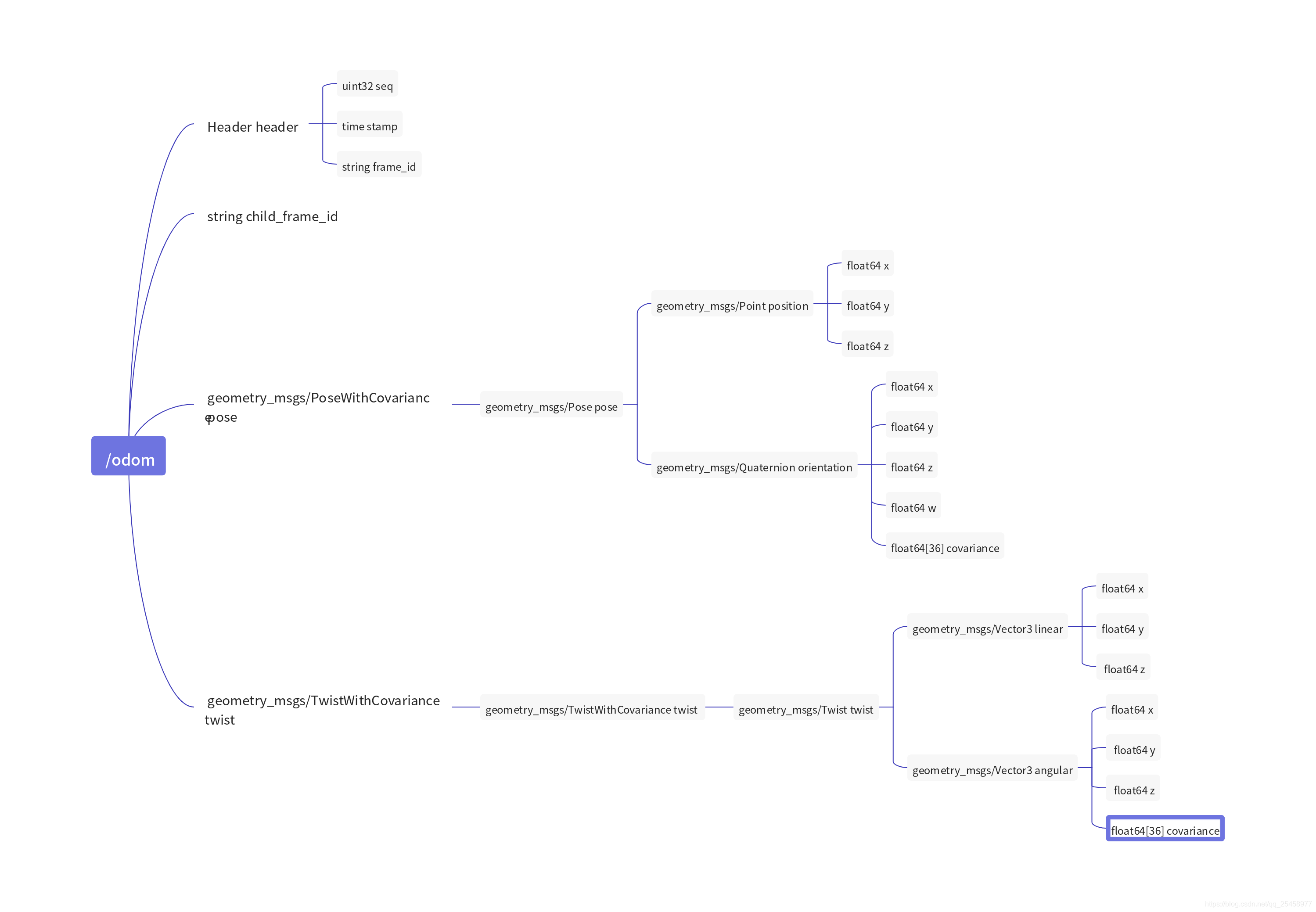
了解了具体的结构后来看一下简单一点的订阅实例:
typedef struct {
float x;
float y;
float th;
} POSE2D;
vector<POSE2D> odom_poses;
void ImageGrabber::GrabOdom(const nav_msgs::Odometry &odom_msg){
cout << "get odom data" << endl;
POSE2D odom_pose;
double odom_time = odom_msg.header.stamp.toSec();
double x = odom_msg.pose.pose.position.x;
double y = odom_msg.pose.pose.position.y;
double ang = odom_msg.pose.pose.orientation.w;
odom_pose.x = x;
odom_pose.y = y;
odom_pose.th = ang;
odom_poses.push_back(odom_pose);
}这里需要声明一下POSE2D的数据包含位置x,y,同时包含机器人的pitch信息th;

















 2411
2411

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









