







 本文详细介绍了如何在simpleFOC库中对直流电机的电流环、速度环和位置环PID参数进行整定,包括电流控制、力矩控制和速度控制的调试步骤,以及注意事项如LPF设置和硬件配合。
本文详细介绍了如何在simpleFOC库中对直流电机的电流环、速度环和位置环PID参数进行整定,包括电流控制、力矩控制和速度控制的调试步骤,以及注意事项如LPF设置和硬件配合。
背景介绍
FOC作为直流无刷电机控制最常用的算法,得到广泛应用。在开源社区最常用的FOC项目有:simpleFOC,ODrive,VESC等。其中simpleFOC因其简单易用,支持多种硬件平台,很适合新手入门。我在用simpleFOC的过程中踩了不少坑,在此记录学习调试过程中的一些心得。
硬件平台:开始最好直接购买套件,熟悉后再自己搭配,我这里直接买的灯哥开源的套件
电机:2204
驱动器:L6234
磁编码器:AS5600
电流检测:INA240
主控MCU:ESP32
软件平台:Arduino,simpleFOC库,simpleFOC studio图形化调试工具
IDE工具:PlatforIO,也可以使用Arduino IDE(编译、下载速度很慢,所以我才找到了替代工具platforIO)
前面两篇总结了simpleFOC studio的基本参数含义,SimpleFOC调参1-力矩控制,SimpleFOC调参2-速度、位置控制,本篇主要总结simpleFOC中PID参数的整定攻略。
1. 电流环/力矩环PID整定
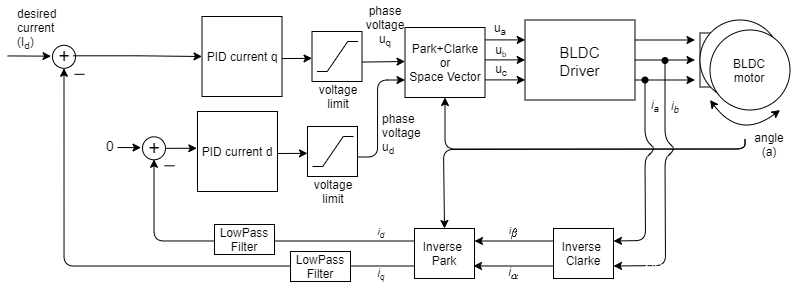
电流环PID整定整体框图如下,Torque control type: FOC current; motion control type: Torque
一般情况下current q、d的PID参数设置为相同的值,只需要调整好current q的PID参数,current d的PID参数不用再单独调试了。调试整体步骤如下:
- I=0,D=0,调试比例增益P,做好记录表格,选择适合的P值
- D=0, 调试积分增益I,做好记录表格,选择合适的I值
- 一般D=0,不用调整。如果系统出现震荡,再增加一点D值,
测试条件:I=0,D=0时,设置目标值从M0—M0.5,P从5~160变化时,current q的变化量。
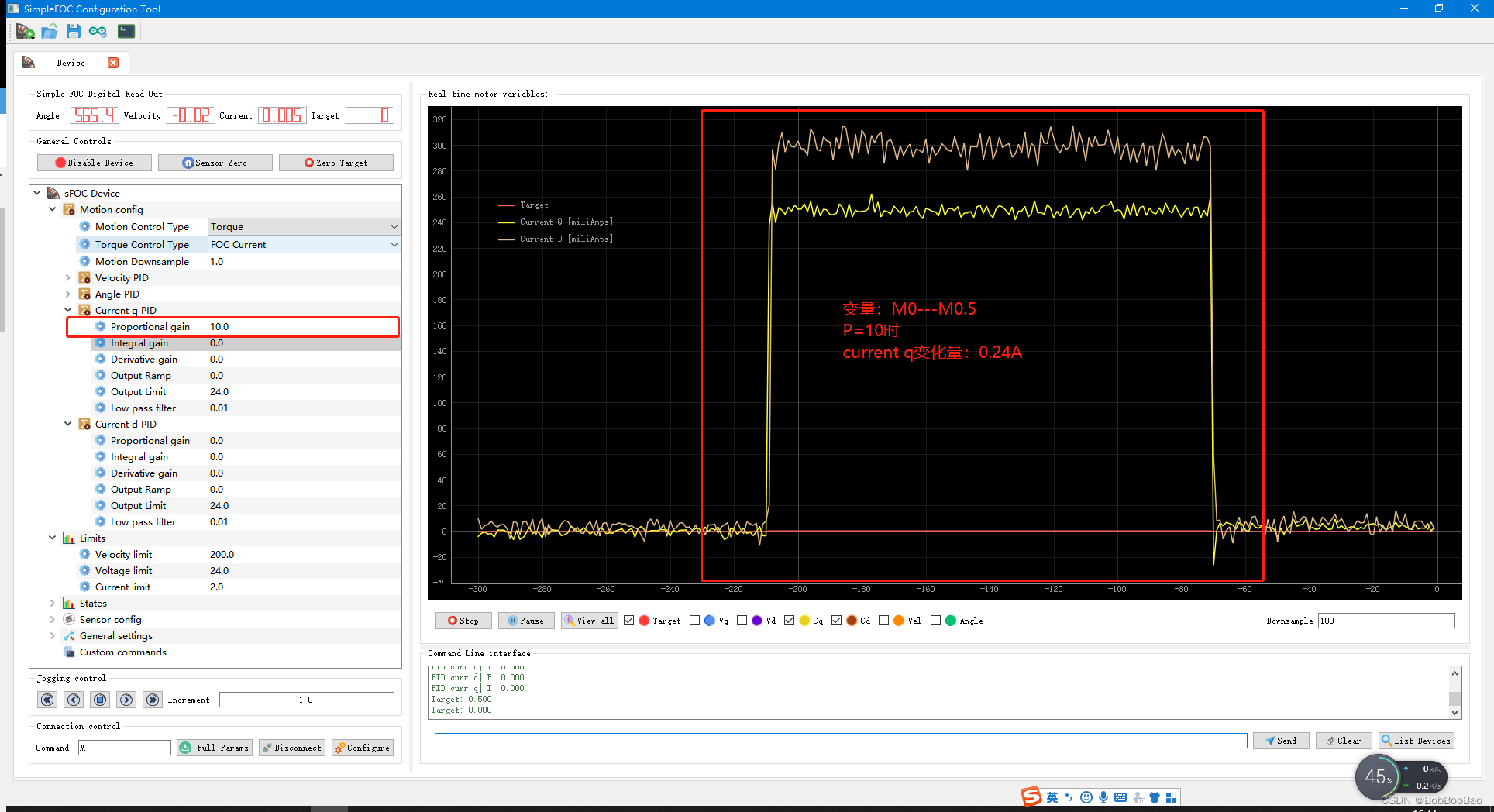
测试结果如下表:从P=20开始,设置M0时手放在电机上开始有震感,P=160时开始有肉眼可见的震荡。选取P=10.
| P 值 | 5 | 10 | 20 | 50 | 75 | 90 | 100 | 150 | 160 | 170 |
|---|---|---|---|---|---|---|---|---|---|---|
| current q | 0.11 | 0.23 | 0.34手摸时有震感 | 0.42 | 0.45 | 0.46 | 0.46 | 0.47 | 0.48轻微震荡 | 0.48震荡 |
在P=10时,设置目标值从M0—M0.5,I从10~1000变化时,current q的从0达到0.5A需要的时间
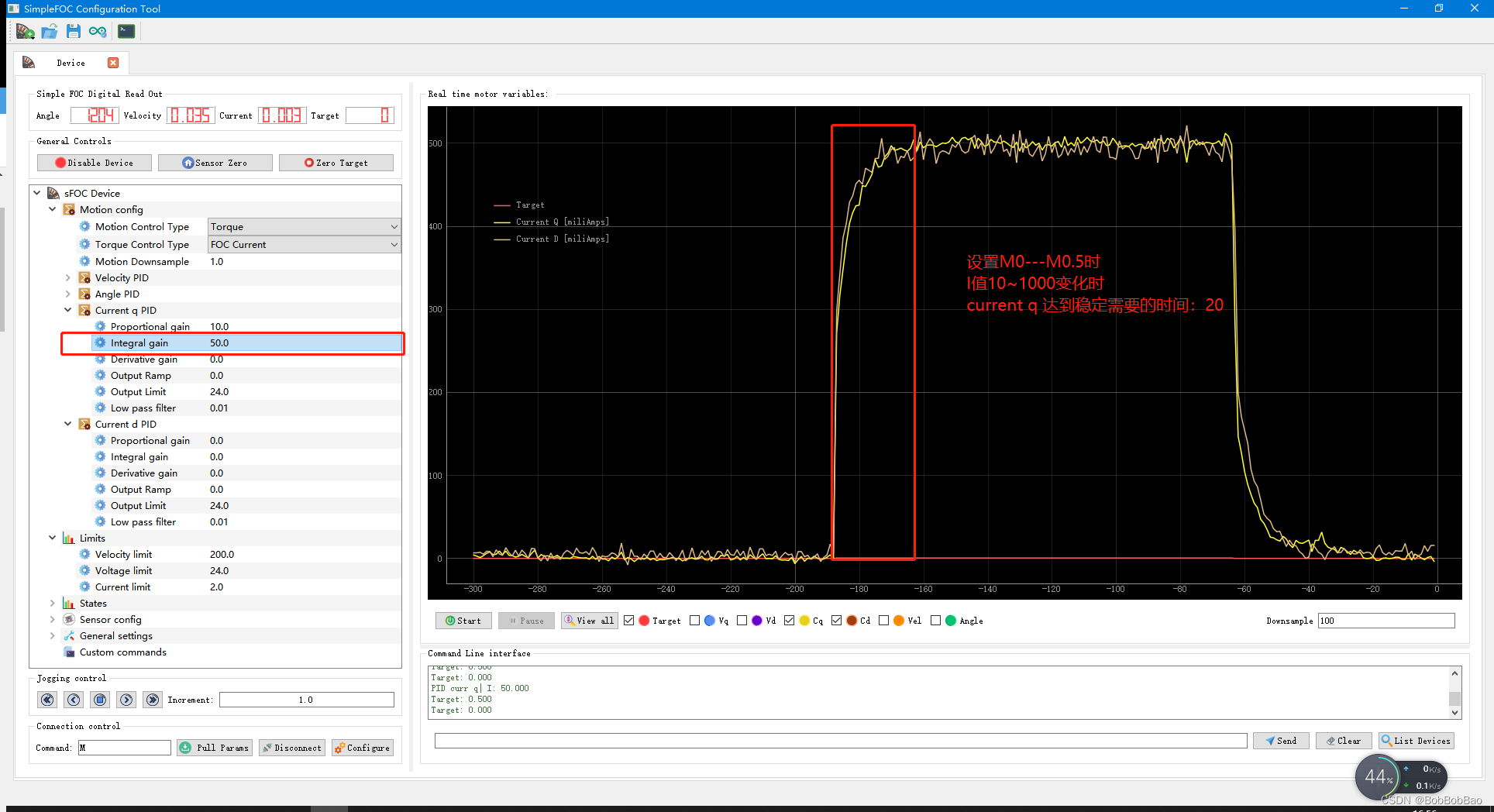
测试结果如下表:从I=200开始,current q稳定的时间基本保持不变,选取I=300。
| I值 | 10 | 50 | 100 | 200 | 300 | 500 | 1000 |
|---|---|---|---|---|---|---|---|
| current q稳定时间 | 90 | 20 | 10 | 6 | 6 | 5 | 3 |
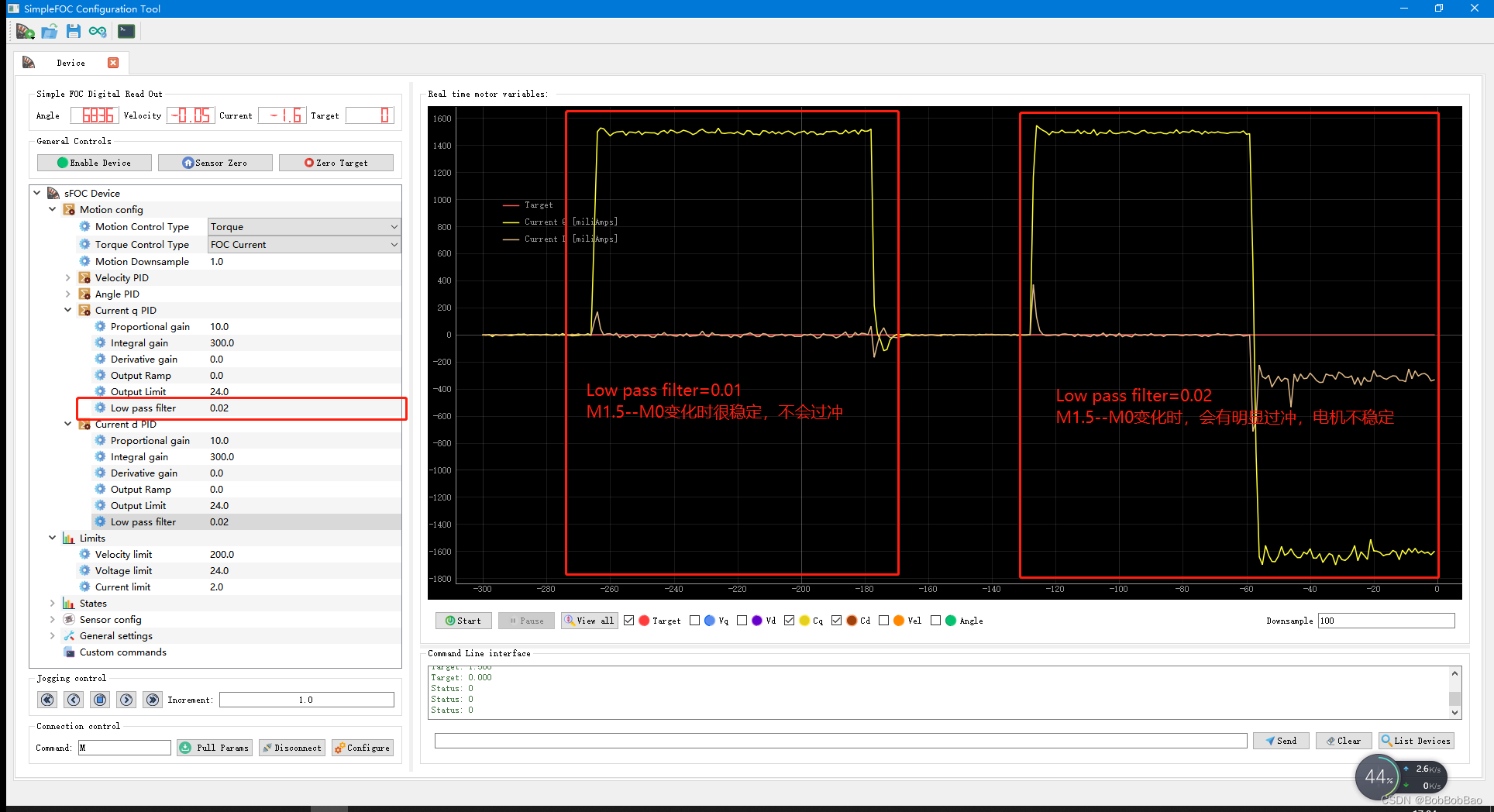
此外要注意low pass filter(LPF)参数的影响。当设置LPF=0.02时,current q的纹波会略微变小,但是在current q变化幅度增大时,很容易出现current q过冲,导致系统不稳定。最后测试选择LPF=0.01,此时虽然current q的纹波略大一点,但是在current q有2A直接跳变到0A时都不会有过冲现象,稳定性大大增加。
2. 速度环PID整定
电流环PID参数设置好之后,更改motion control type为velocity。
测试条件:I=0,D=0时,设置目标值从M0—M100,P从0.010~0.025变化时,velocity的变化量。在跳变点,不时会出现current q/d过冲的现象。
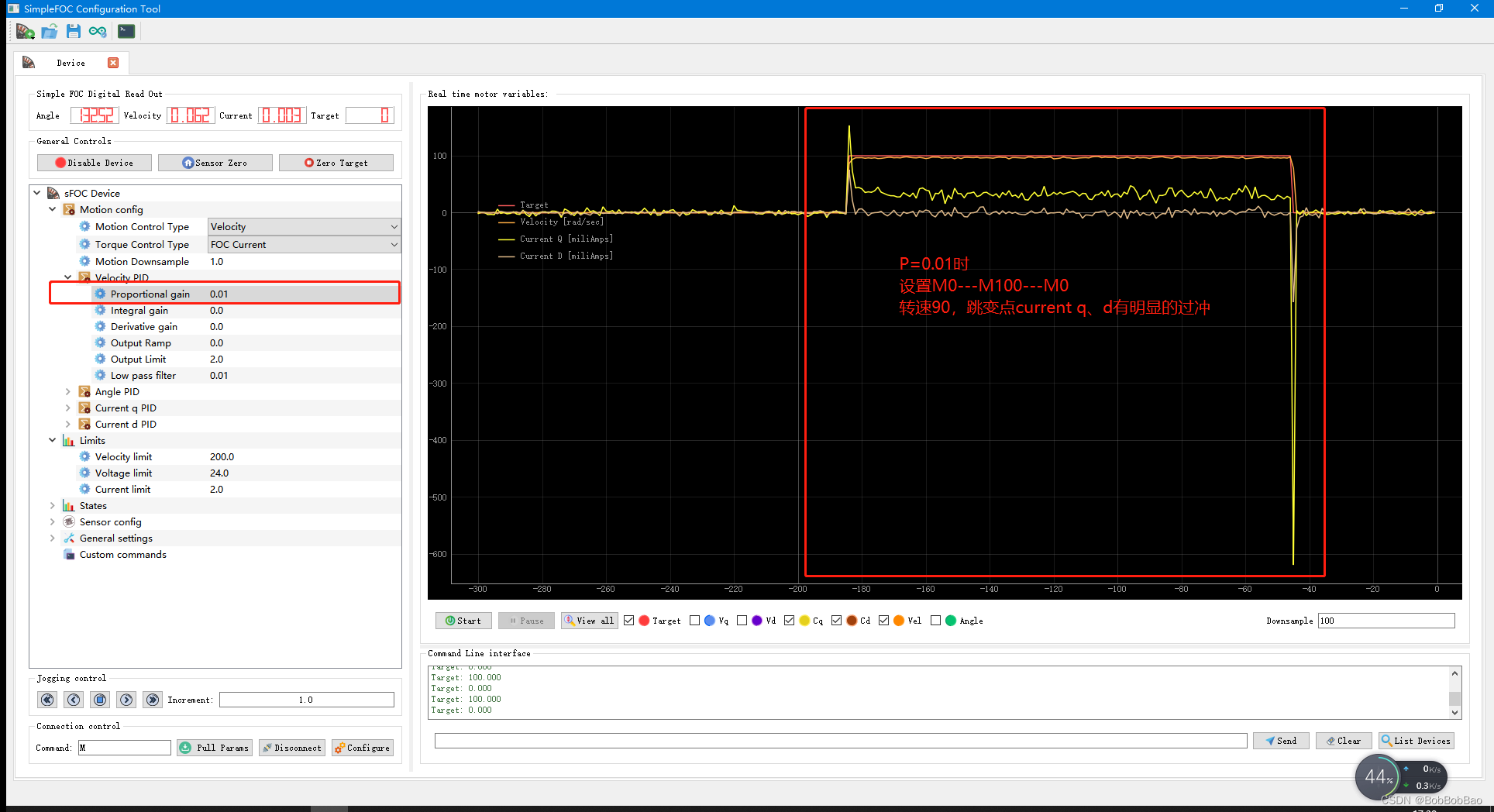
测试结果如下表:从P=0.01开始,设置M0—M100,P=0.04时开始出现异常震荡,最终选择P=0.02
| P 值 | 0.01 | 0.015 | 0.020 | 0.025 | 0.030 | 0.040 |
|---|---|---|---|---|---|---|
| velocity | 95 | 97 | 98 | 98 | 100 | 震荡 |
当P=0.02时,设置目标值从M0—M100,I从0.1~0.9变化时,velocity达到100后的过冲量.
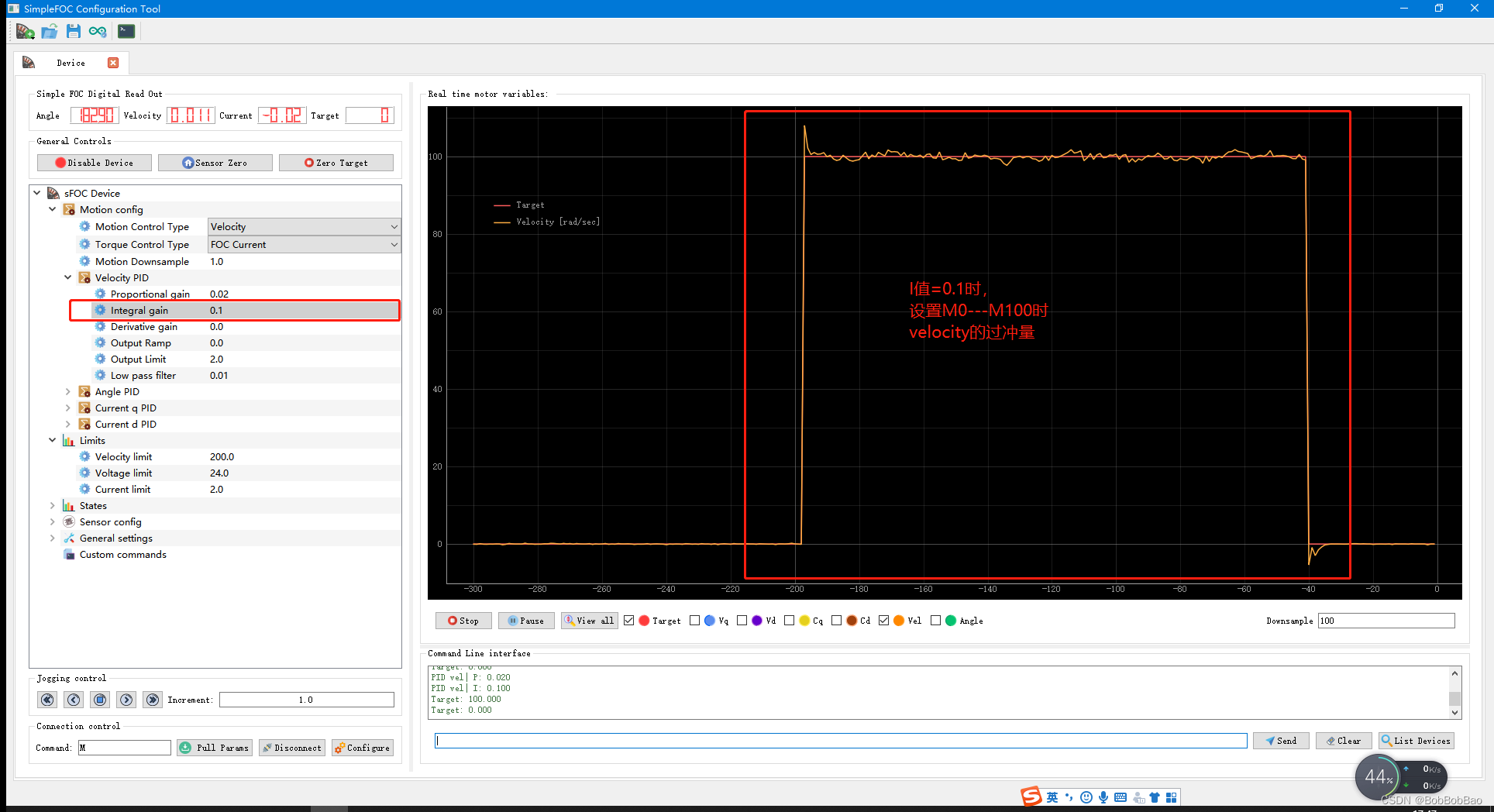
测试结果如下表:从I=0.1开始,设置M0—M100,I=0.9时开始出现异常震荡,最终选择I=0.1
| I 值 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 |
|---|---|---|---|---|---|---|---|---|---|
| velocity 过冲量 | 105 | 105 | 108 | 108 | 117 | 130 | 135 | 135 | 震荡 |
3. 位置环PID整定
位置环PID整定相对简单很多,只需要调整P值就可以了。需要注意:在长时间进行PID整定时,simpleFOC硬件内部参数可能会与studio参数不一致,此时需要把已经整定好的电流、速度PID参数通过程序写入硬件,再调试位置环
测试条件:I=0,D=0时,设置目标值从M0—M3.14,P从1~20变化时,angle从0运动到3.14需要的时间。在跳变点,不时会出现current q/d过冲的现象。
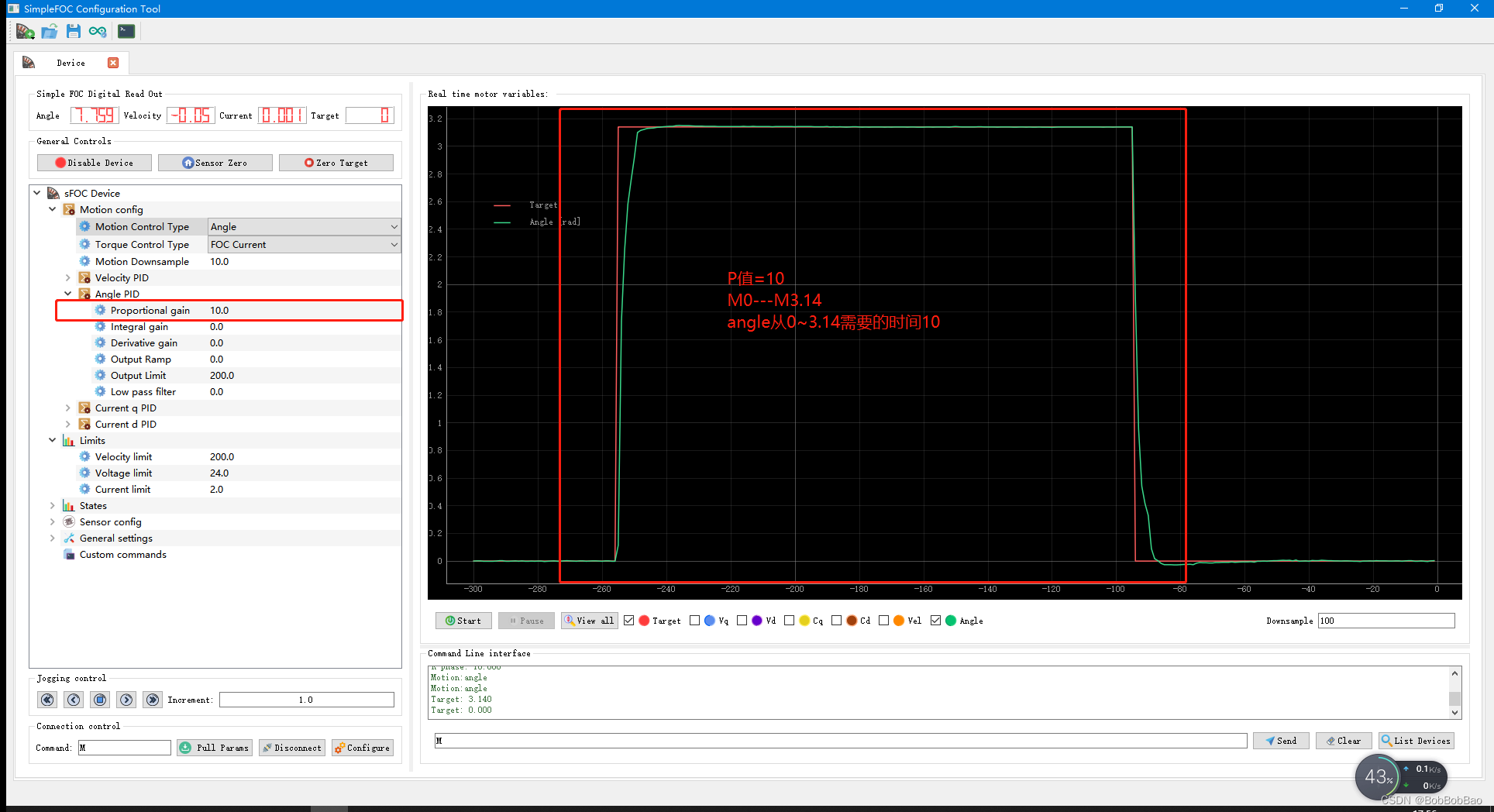
测试结果如下表:从P=1开始,设置M0—M3.14,最终选择P=10
| P 值 | 1 | 2 | 3 | 5 | 10 | 20 |
|---|---|---|---|---|---|---|
| angle时间 | 40 | 25 | 20 | 10 | 10 | 5 |
4. 其它注意事项
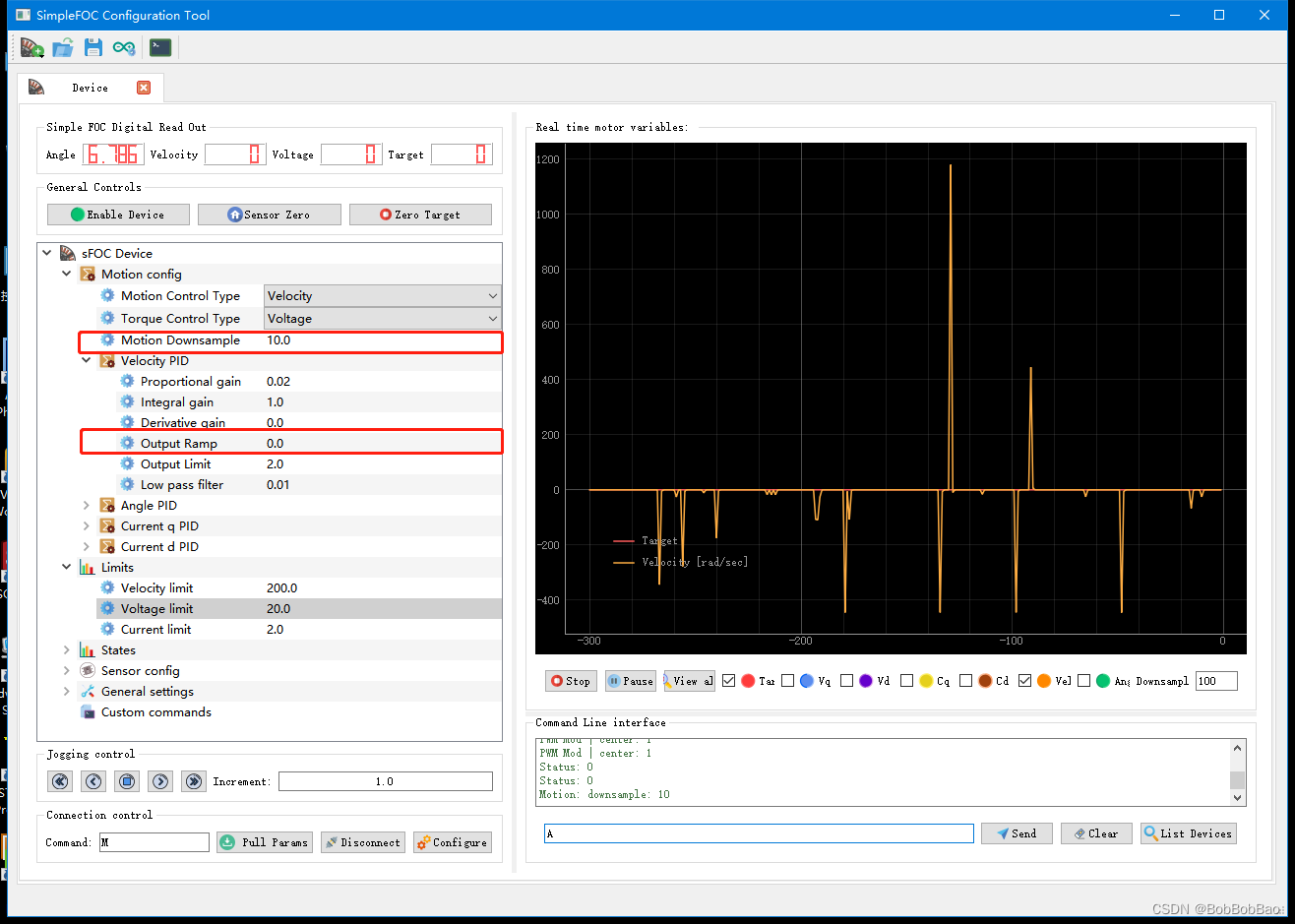
- motion downsample:用于设置down sample motion loop, 会直接影响motor.loopFOC()循环的速度,默认值10。在进行PID整定时,必须首先保障motion downsample的值相同,不同的值对应的PID参数会不同。
- output ramp:输出斜率,用于减小输入到力矩控制环的最大变化量。output_ramp越大,PID引起Uq变化的速度更快;output_ramp越小,PID引起Uq变化的速度更慢。单位: V/s。通常控制环1ms循环一次,假设output_ramp=10,则每次循环,PID控制器能引起Uq变化10[V/s] * 0.001s = 0.01V.在调试PID过程中会影响到P值、I值的作用时间,output ramp越大,响应时间越短。每次调节前需要保障output ramp 值相同,不同的值对应的PID参数会不同。

















 2155
2155

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









