







激光雷达点云 相机图像 联合标定 信息融合
一、前期对于相关概念的理解
1、信息融合之前,第一步:激光雷达与相机联合标定
设备:livox雷达+DJI的云台相机H20T
①、为什么要进行标定,标定的目的:
参考资料:
标定的一些原理:
https://blog.csdn.net/xueluowutong/article/details/80950915
【立体视觉】世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系
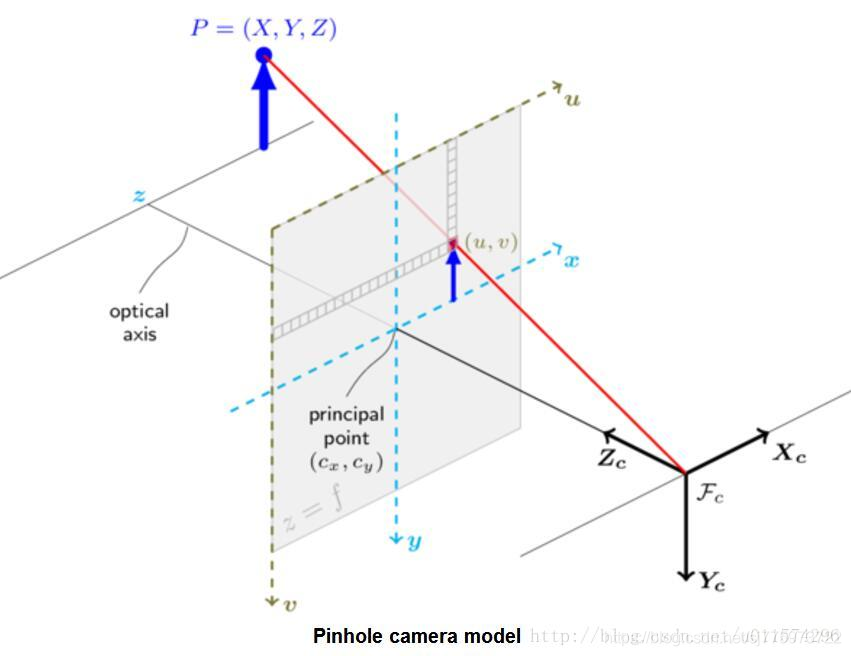
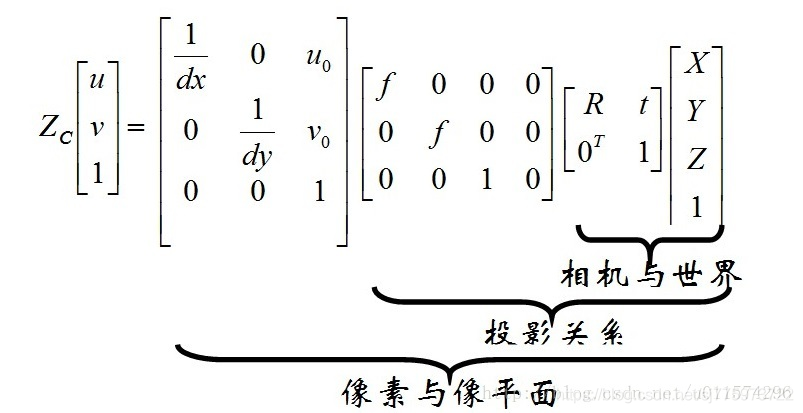
上图中计算的是由三维点云到像素平面的转换,可以用来:
1、可以由点云计算得到某一点在像素坐标系中的位置u,v,进而获得此位置像素的rgb,将其赋给点云,便可实现点云着色。
2、可以由点云计算出某一点在像素坐标系中的位置u,v,然后,在位置u,v,绘制一个点,如果愿意的话,可以按照距离给这个点着色,实现将点云投影到图像中。
那么,当知道像素平面的一个点的坐标u,v,如何得到这个像素点的距离信息?
②、如何进行激光雷达相机的联合标定:
2、激光雷达的点云与相机的图像的信息融合
单一传感器不可避免的存在局限性,为了提高系统的稳健性,采取多传感器融合的方案,融合又包含不同传感器的时间同步和空间同步。
个人感觉,这是一种前融合。
参考资料:
【1】★★★ 激光雷达与相机融合(五)-------ros实时版点云投影到图像平面
【2】点云图像融合(点云着色):介绍了如何使用标定的结果进行相机图像与点云进行融合。
【3】无人驾驶传感器融合系列(十)—— 目标追踪之相机与激光雷达数据融合
一些介绍相机与点云融合的方法:
【1】https://github.com/LidarPerception/kitti_lidar_camera
【2】https://blog.csdn.net/qq_33801763/article/details/78959205
【3】Sensor fusion after intrinsic and extrinsic calibration - Autoware
二、激光雷达 相机 联合标定步骤
1、使用livox自家的标定程序
使用过程中,遇到的一些问题:
①、在计算相机内参的时候,cameraCalib.cpp中需要注释掉//imshow("Camera Calibration" , view_gray);,个人感觉主要原因还是NX板子上的opencv没有装好。
②、在计算图像角点的时候,需要将corner_photo.cpp中的104行-108行中涉及到opencv的代码注释掉,不然也无法正常计算下去。
③、ceres还是得安装1.14才能行。参考:https://blog.csdn.net/qq_41586768/article/details/107541917
2、使用autoware的标定模块进行相机、激光雷达的联合标定
参考链接:ubuntu16.04安装Autoware1.11和联合标定工具包calibration以及相关问题介绍(亲测有效)
遇到的一些问题的解决参考链接:使用calibration_toolkit时,编译的小问题。
终于编译完成了,接下来,对autoware的源码进行学习,看看是怎么将图像中检测到的目标物,在点云中产生三维检测框的。
进入标定的主界面,里面参数的意义为:
参考:
- 【Autoware 标定工具 Calibration Tool Kit 联合标定 Robosense-16 和 ZED 相机!】
- 【激光雷达和相机的联合标定(Camera-LiDAR Calibration)之Autoware】,里面会有相机内参的标定的相关介绍。
配置标定板棋盘格参数:
- Pattern Size(m):标定板中每个格子的边长,单位 m,我的标定板每个格子长 0.025 m
- Pattern Number:标定板长X宽的单元格数量 - 1,我的标定板是长有 12 个格子,宽有 9 个,所以填 11x8,减一是因为标定检测的是内部角点
三、标定之后,将激光点云与图像进行融合
如何将二维图像检测到的bounding box投影到三维点云得到三维检测框呢?
官网中相关的介绍为:
Requirements
Input Topics:
Camera intrinsics (sensor_msgs/CameraInfo)
Camera-LiDAR extrinsics (tf)
Object Detections results from a Vision Detector (autoware_msgs/DetectedObjectArray)
Object Detections results from a Range Detector (autoware_msgs/DetectedObjectArray)
难道还需要点云的目标检测框才能做匹配吗?
=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=
在将点云转换到像素坐标系时,会出现一些点在转换之后,其在像素坐标系下的坐标已经超出了图片的尺寸,因此需要将这些点进行剔除:
pcl::PointCloud<pcl::PointXYZRGB>::Ptr fused_cloud(new pcl::PointCloud<pcl::PointXYZRGB>);
for (int m = 0; m < uv.cols(); m++)
{
cv::Point point;
point.x = uv(0, m);
point.y = uv(1, m);
// Store corners in pixels only of they are on image plane
if (point.x > 0 && point.x < your_image_as_opencv_mat->cols)
{
if (point.y > 0 && point.y < your_image_as_opencv_mat->rows)
{
pcl::PointXYZRGB fused_3d_point;
cv::Vec3b rgb_pixel = your_image_as_opencv_mat->at<cv::Vec3b>(point.y, point.x);
// Get x,y,z values of this point from original raw point cloud
fused_3d_point.x = matrix_lidar_points_in_lidar_frame(0, m);
fused_3d_point.y = matrix_lidar_points_in_lidar_frame(1, m);
fused_3d_point.z = matrix_lidar_points_in_lidar_frame(2, m);
// get r,g,b value of this point from segmented image
fused_3d_point.r = rgb_pixel[2];
fused_3d_point.g = rgb_pixel[1];
fused_3d_point.b = rgb_pixel[0];
//put cicles into your image
cv::circle(*your_image_as_opencv_mat, point, 1, cv::Scalar(0, 0, 255), 2, 8, 0);
fused_cloud->points.push_back(fused_3d_point);
}
}
}
=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=-=
2021.05.22:
订阅多个话题,如何实现话题之间的同步处理(也即多传感器融合)?
在ROS节点中需要订阅两个及两个以上的话题时,这些话题的频率不一致,需要保持对这
些话题数据的同步,且需要同时接收数据一起处理然后当做参数传入到另一个函数中。


















 5264
5264

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









