







1.创建ROS工作空间catkin_ws
递归创建src文件
mkdir -p ~/dev/catkin_ws/src
进入src文件夹
cd ~/dev/catkin_ws/src
初始化工作空间
catkin_init_workspace
这样就在src文件中创建了一个 CMakeLists.txt 的文件,目的是告诉系统,这个是ROS的工作空间。
2.去github下载ros包
在src目录下下载ROS包
git clone https://github.com/Slamtec/rplidar_ros.git
3.在工作空间中编译
编译
cd ~/dev/catkin_ws/
catkin_make
source
source ~/dev/catkin_ws/devel/setup.bash
(为了让source永久生效,应该写入.bashrc文件中)
echo "source ~/dev/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
4.连接雷达
雷达连接好后会出现usb串口,如果未出现,则重启
查看usb串口及权限
ls -l /dev |grep ttyUSB
若发现文件号是ttyUSB0
给串口文件号ttyUSB0添加写权限
sudo chmod 666 /dev/ttyUSB0

5.运行ROS包,查看雷达数据(两种)
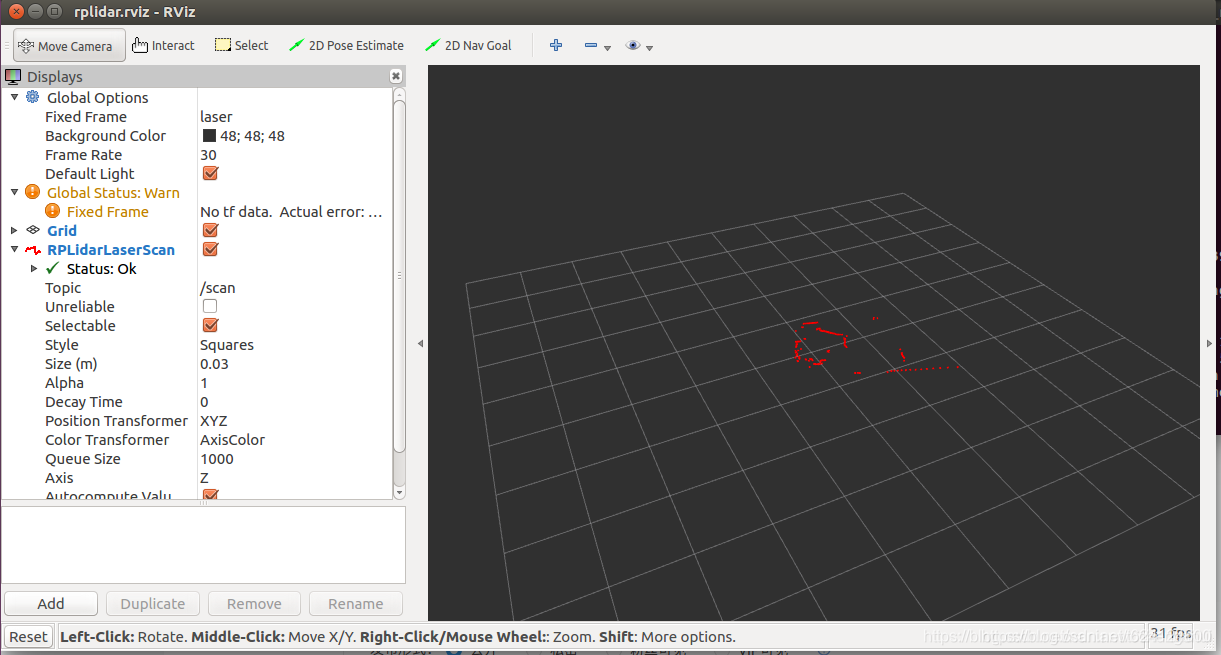
5.1可视化查看rviz
由于ROS包中的view_rplidar节点包含了激光雷达的启动文件,所以这就不需要单独启动激光雷达(注意启动ros主节点)
roscore
roslaunch rplidar_ros view_rplidar.launch
这样就可以在rviz中看到激光雷达扫描出来的数据了
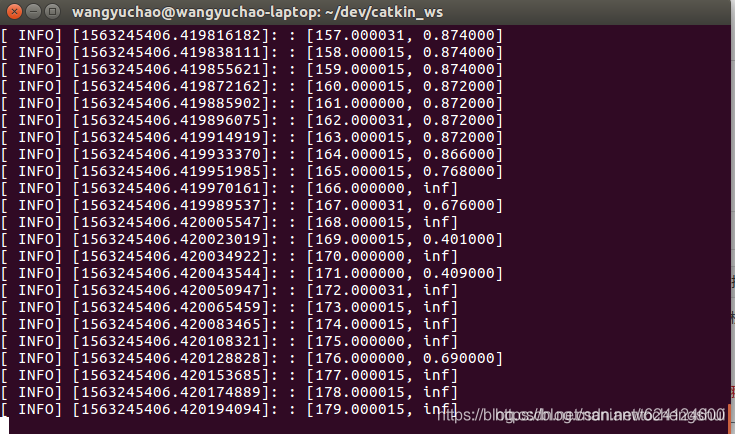
5.2 在终端查看雷达数据
首先启动ros主节点以及启动激光雷达
roscore
roslaunch rplidar_ros rplidar.launch
启动rplidarNodeClient节点,在终端查看数据
rosrun rplidar_ros rplidarNodeClient
修改usb权限默认设置,不用每次开机就都去修改一次usb权限
link
https://blog.csdn.net/dzhongjie/article/details/84575189















 2207
2207











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











