







 该代码实现了一个函数,用于在三维空间中计算点绕任意轴的旋转。它涉及向量平移、旋转和平移回原点的过程,利用矩阵运算来完成。公式和步骤详细解释了如何构建旋转矩阵,并最终得到新的位置坐标。
该代码实现了一个函数,用于在三维空间中计算点绕任意轴的旋转。它涉及向量平移、旋转和平移回原点的过程,利用矩阵运算来完成。公式和步骤详细解释了如何构建旋转矩阵,并最终得到新的位置坐标。
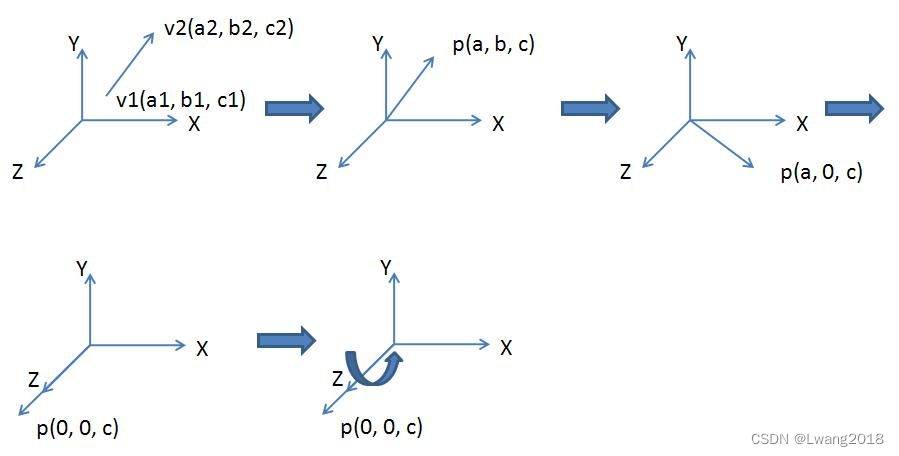
绕任意轴旋转的情况比较复杂,可按如下方法处理:
- 将旋转轴平移至原点
- 将旋转轴旋转至YOZ平面
- 将旋转轴旋转至于Z轴重合
- 绕Z轴旋转θ度
- 执行步骤3的逆过程
- 执行步骤2的逆过程
- 执行步骤1的逆过程
假设用v1(a1, b2, c2)和v2(a2, b2, c2)来表示旋转轴,θ表示旋转角度。为了方便推导,暂时使用右手系并使用列向量,待得出矩阵后转置一下即可,上面步骤对应的流程图如下:
CVector3D RandomRotate(CVector3D p, CVector3D a0, CVector3D a1, float theta)
{
CVector3D newPosition;
CVector3D b = a1 - a0;
b.Normalize();
theta = theta * PI / 180;
float u = b.x;
float v = b.y;
float w = b.z;
float SinA = sin(theta);
float CosA = cos(theta);
float uu = u * u;
float vv = v * v;
float ww = w * w;
float uv = u * v;
float uw = u * w;
float vw = v * w;
float t00 = uu + (vv + ww) * CosA;
float t10 = uv * (1 - CosA) + w * SinA;
float t20 = uw * (1 - CosA) - v * SinA;
float t30 = 0;
float t01 = uv * (1 - CosA) - w * SinA;
float t11 = vv + (uu + ww) * CosA;
float t21 = vw * (1 - CosA) + u * SinA;
float t31 = 0;
float t02 = uw * (1 - CosA) + v * SinA;
float t12 = vw * (1 - CosA) - u * SinA;
float t22 = ww + (uu + vv) * CosA;
float t32 = 0;
float t03 = (a1.x * (vv + ww) - u * (a1.y * v + a1.z * w)) * (1 - CosA) + (a1.y * w - a1.z * v) * SinA;
float t13 = (a1.y * (uu + ww) - v * (a1.x * u + a1.z * w)) * (1 - CosA) + (a1.z * u - a1.x * w) * SinA;
float t23 = (a1.z * (uu + vv) - w * (a1.x * u + a1.y * v)) * (1 - CosA) + (a1.x * v - a1.y * u) * SinA;
float t33 = 1;
newPosition.x = (float)(t00 * p.x + t01 * p.y + t02 * p.z + t03);
newPosition.y = (float)(t10 * p.x + t11 * p.y + t12 * p.z + t13);
newPosition.z = (float)(t20 * p.x + t21 * p.y + t22 * p.z + t23);
return newPosition;
}
参考 https://www.cnblogs.com/graphics/archive/2012/08/10/2627458.html

















 586
586

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









