







嵌入式开发中,知识细碎,工程实际中,如果某些细碎的问题理解不到位,就可能成为Bug的拦路虎。本文,聊一聊CAN通信中的Tx Comfirmation、Rx Indication以及Acknowledgement(Ack)。
************************************************************************************
关注微信公众号“开心果 Need Car”,一起讨论Autosar开发中遇到的那些“坑”!
************************************************************************************
1、Tx Comfirmation 与 Acknowledgement(Ack)
了解Tx Comfirmation之前,我们需要先清楚“发送请求(Transmit Request)”,只有先发送请求,才有对请求结果的确认(Comfirmation)。可以参考前文Autosar通信栈:发送返回OK和发送确认是一回事吗。
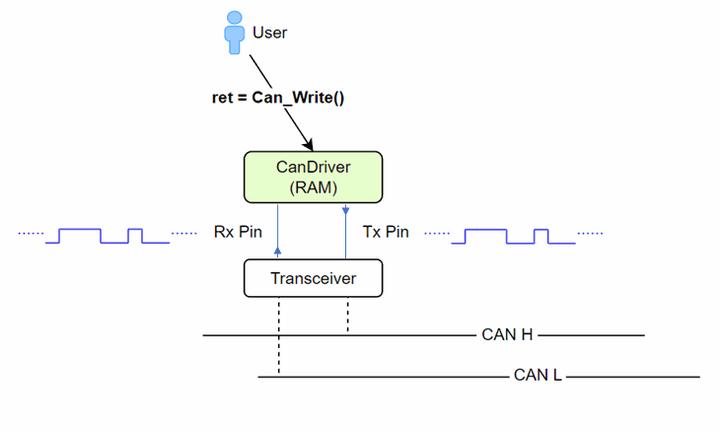
先说发送请求,当用户请求发送CAN报文时,最终会调用Can_Write()接口,完成报文发送的请求动作,该接口有一个返回值,表示发送请求成功与否。如果发送请求成功,返回E_OK;如果发送请求不成功,返回E_NOT_OK。E_OK表示什么意思呢?意思是说:CAN驱动有可用的缓存空间(RAM),请求发送的报文信息已经被成功地放入CAN驱动缓存区(注意,还没有发送到CAN BUS),这只是完成了发送请求,如下绿色框图:

当发送的报文信息被成功添加到驱动缓存区以后,这些报文就时刻准备发送到总线。我们知道,一个网段内可以有多个节点,每个节点都等着发送各自缓存区中的报文,谁先发送呢?答:通过仲裁决定哪个节点可以使用CAN BUS,仲裁赢的节点,获取总线使用权,进而发送报文。谁发送的报文优先级高(CAN ID越小,优先级越高)谁就可以抢占总线使用权。可以参考前文CAN总线仲裁原理。
当网段内的某个节点获取总线使用权以后,就开始发送缓存区中最高优先级的报文,发送节点为了获悉自己所发报文信息是否正确,在使用Tx Pin发送的同时,使用Rx Pin接收(CAN总线是串行总线),当然,总线上的其他节点(处于监听状态的节点)也会通过CAN BUS接收总线上的报文。发送节点边发送边接收过程如下所示:
发送节点按照CAN报文格式发送各个位域,发送节点发送ACK Field(ACL Slot、ACK Delimiter)时,2 Bit均发送隐性位(Recessive,1),当接收节点接收到ACK Field的第一个Bit(ACK Slot,ACK应答槽)时,接收节点将其置为显性位(Dominant,0),由于"线与"原则(显性位覆盖隐性位),所以,CAN BUS上,ACK Slot = 0,这个动作称为应答(Acknowledgement),即:接收节点应答发送节点,告知发送节点,其发送的报文已被成功接收,如下所示:
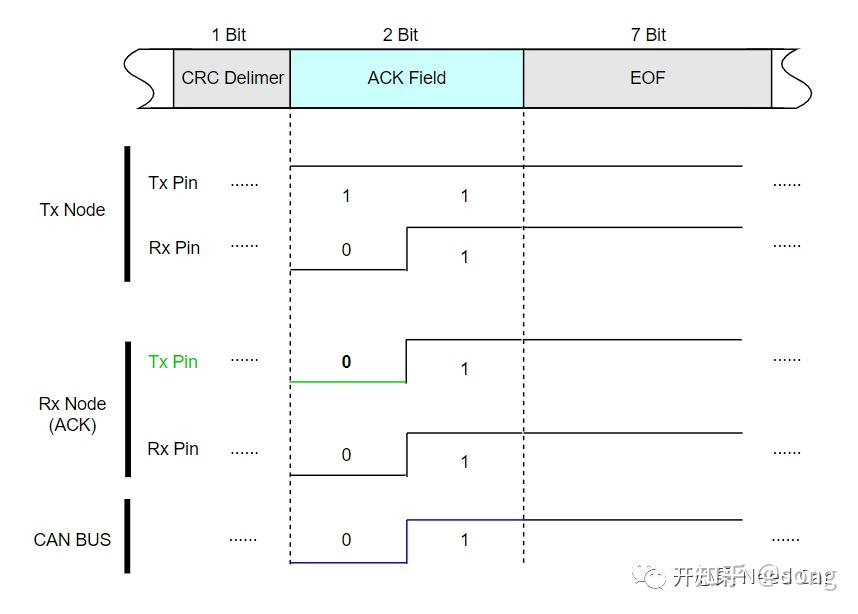
接收节点收到隐性("1")的Ack Slot时,将其置为显性("0"),这个动作由接收节点的Tx Pin触发。提示:
- Ack动作由Controller完成,不是Transceiver;
- 总线上可能有多个接收节点,只要其中一个应答(Ack),发送节点就认为数据发送成功;
- 当总线上没有节点应答发送节点时(即:总线上只有一个节点),发送节点检测到Ack Slot为隐性("1"),会发出错误帧(Acknowledgment Error),同时,发送节点的TEC累加,之后发送节点尝试重传。所以,TEC很快会达到128,进入Error Passive模式。注意,如果一直是Acknowledgment Error,TEC不会再累加,不会进入Bus Off。
当发送节点的发送报文被其他节点成功接收以后,发送节点就会将这个信息反馈给对应的User,告诉请求发送的User,这个过程就是Tx Comfirmation。这个反馈途径有两种:
- 中断方式,成功将一帧报文发送到总线,且被其他节点有效接收以后,发送节点进入发送完成中断例程,调用User注册的回调接口,比如:CanIf_TxConfirmation(),CanIf在进一步调用目标上层Xx_TxComfirmation 回调接口告知User发送结果。
- Polling方式,CAN驱动的Main函数周期性(eg:5ms)的检测是否有报文被成功发送,如果有,则调用目标User的Xx_TxConfirmation(),告知其请求发送报文被接收的结果,即:已被其他节点成功接收,且被应答。
2、Rx Indication
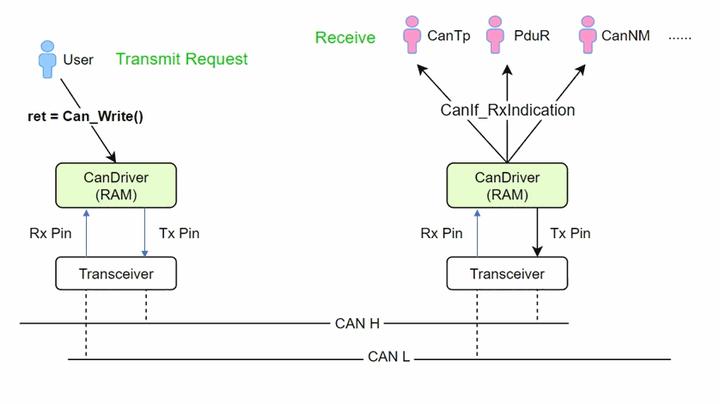
什么是Rx Indication呢?CAN BUS上有节点发送报文,就有目标节点接收报文,当接收节点接收到所需的报文以后,需要将接收的信息给到目标User,如下所示:
如何通知目标节点呢?两种方式:
- 中断方式,当接收节点成功接收到一帧CAN报文以后,程序进入接收完成中断例程,在接收完成中断例程中,会通过上层注册好的Call Back(eg:CanIf_RxIndication())将接收的报文信息送给目标上层。
- Polling方式,CAN驱动的Main主函数不断地查询是否有报文接收,如果有,则调用Xx_RxIndication()将接收信息送给目标User处理。
如上,将接收报文信息通知到目标User的过程就是Rx Indication。
************************************************************************************
关注微信公众号“开心果 Need Car”,一起讨论Autosar开发中遇到的那些“坑”!
************************************************************************************
















 526
526











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









