






 本文探讨了二维和三维空间中的旋转矩阵,特别是它们在表示刚体运动、群论结构(如SO(2)和SO(3))以及正交变换中的应用。讨论了齐次矩阵、罗德里格斯公式、旋量和指数积公式在机械臂运动学模型构建中的优势。
本文探讨了二维和三维空间中的旋转矩阵,特别是它们在表示刚体运动、群论结构(如SO(2)和SO(3))以及正交变换中的应用。讨论了齐次矩阵、罗德里格斯公式、旋量和指数积公式在机械臂运动学模型构建中的优势。
1 旋转矩阵
1.1 二维
点在平面上的平移可以表示为点的坐标加上一个向量,点绕原点的旋转可以表示为点的坐标左乘一个方阵
。
具体过程如下:
平移:
旋转:
为刚体上某个点初始的坐标,
为变换后的坐标。
后续解释SO(2)的含义。
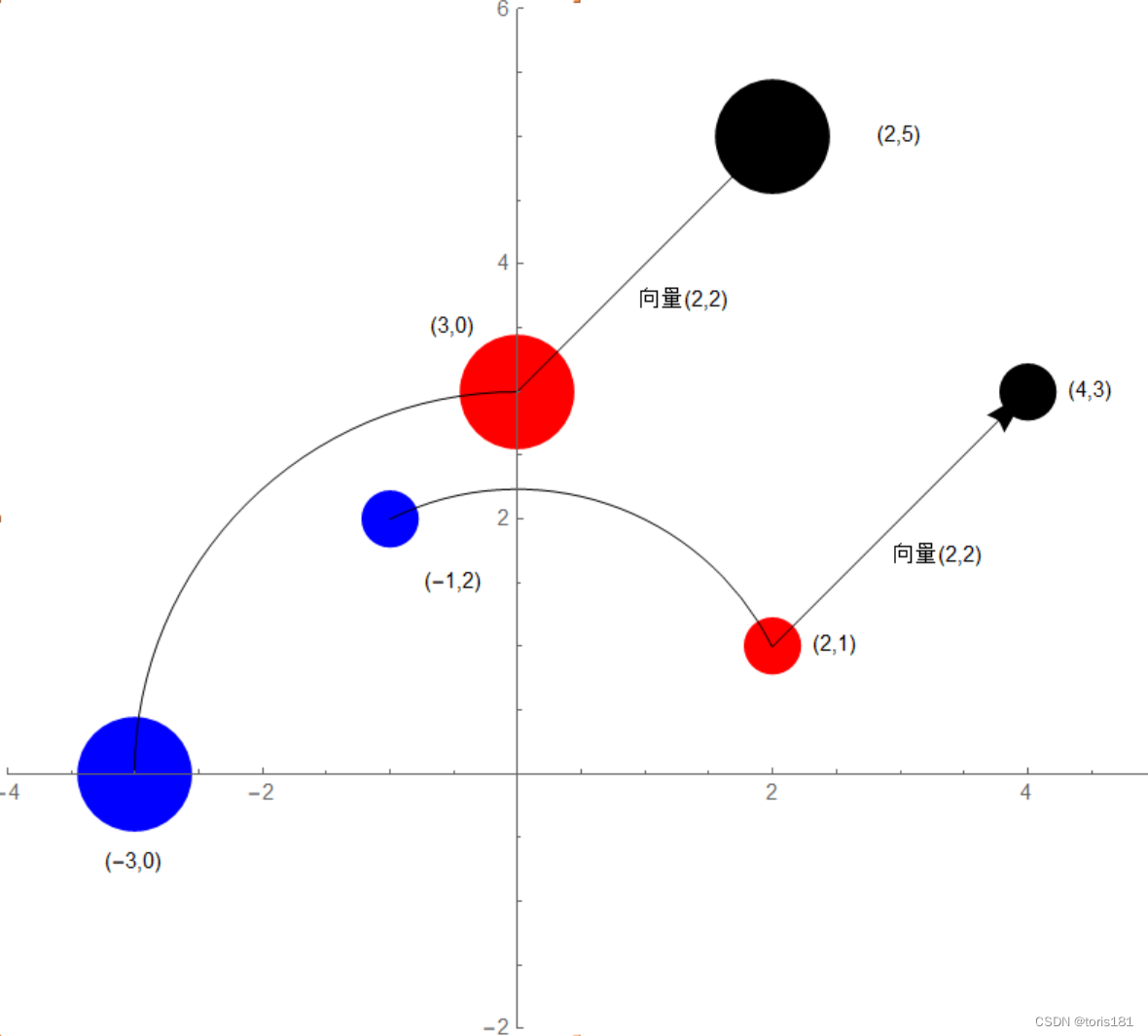
上图红点平移(2,2)得到黑点,红点左乘R1矩阵得到蓝点。
(刚体上任意两点间的距离在旋转或平移后保持不变。以此可以用旋转刚体的特征点(例如长方形的角点)并按之前的顺序连接旋转后的角点,来表征长方形的旋转)
矩阵的第一行和第二行分别表示该坐标系下x,y轴方向的单位向量。如果它们不能互相表达(即线性无关,例如
,简记I,称为单位矩阵),那么他们的组合可以表示平面内的任意位置,平面为它们张成的空间,它们被称为空间的基。
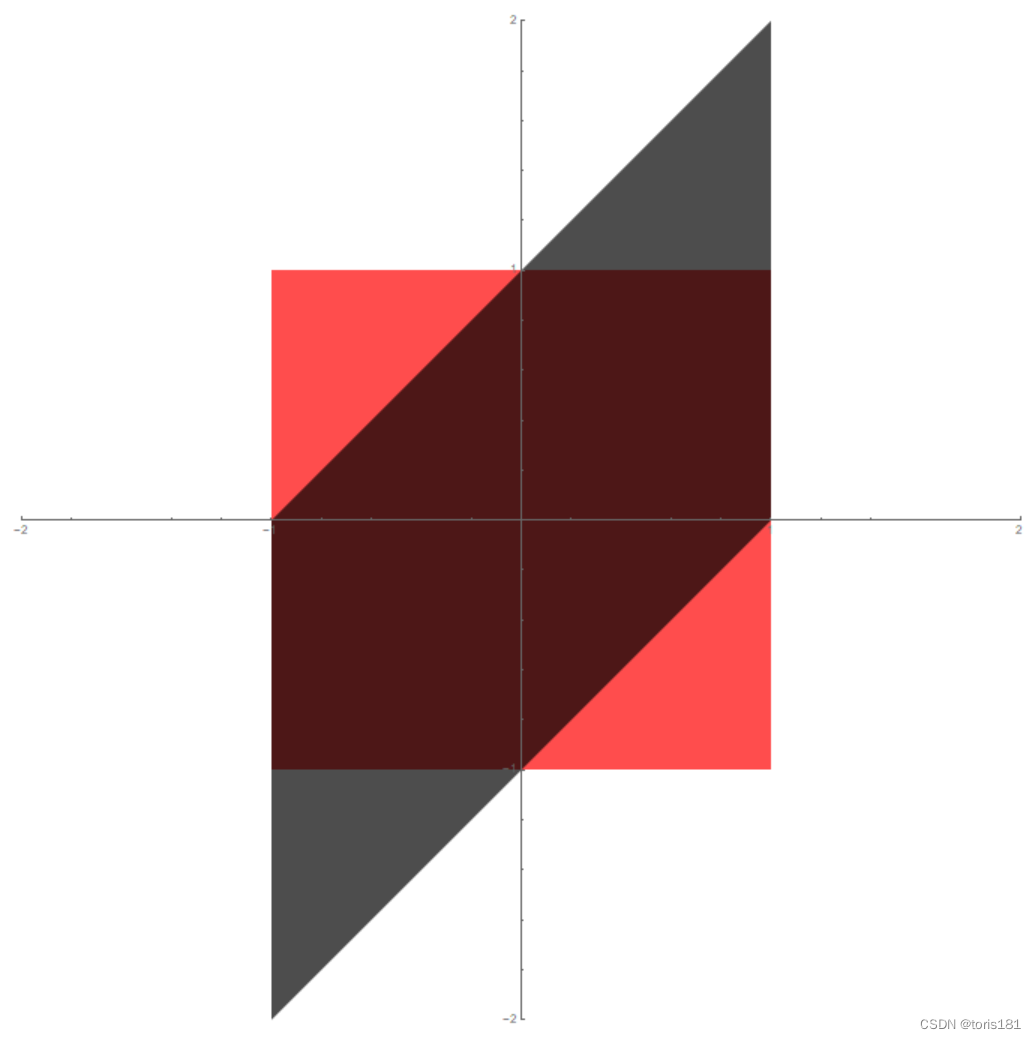
基不一定互相垂直,例如,相同坐标的图形在不同的基下形状不同。下图中黑色平行四边形为正方形在
空间的形状。
单位矩阵表示不做任何变换。旋转矩阵
旋转矩阵将图形绕原点旋转。它的两行分别是旋转前的基在旋转后的坐标系下的表示。或者说,为了将刚体旋转x度,需要把坐标系旋转-
度:原来的x轴变为
,原来的y轴变为
。
1.2 群
群(Group)是一种集合加上一种运算的代数结构。
我们把集合记作 A,运算记作, 那么群可以记作
。群要求改运算满足以下四条件:
1. 封闭性:如果a1、a2在A中,那么a1a2也在a中。
2. 结合律: 如果a1、a2、a3在A中,那么a1a2
a3=a1
(a2
a3)。
3. 幺元:存在a0,使得对于A中任意的a,都有a0a=a。
4. 逆: 对于A中任意的a,都有。
所有的二维旋转矩阵构成一个群,记为SO(2):
1.矩阵作用为旋转
度,矩阵
作用为
旋转度,那么
即旋转度,再旋转
度与旋转
度效果相同。
2.假定分别为旋转
角度的矩阵,那么不同作用顺序的结合不影响最终的结果。
注意不是不同顺序的结合。运算可能不满足交换律,但是满足结合律。
3.维旋转矩阵的幺元为。(对角线上的元素均为1,其他位置的元素均为0的矩阵被称为单位矩阵,记作I)
4.对于任意旋转的矩阵,都存在旋转
的矩阵作为它的逆矩阵。
SO(2)意为Special Orthogonal (2),特殊正交的意思,特殊指这个变换满足右手坐标系,即矩阵的行列式为1,正交指这个矩阵的两个基互相垂直,2指这是二维空间的群。是满足左手坐标系的正交群,他的行列式为-1。
1.3 齐次矩阵
将旋转矩阵和平移矩阵拼接可以得到齐次变换矩阵,二维下所有齐次变换矩阵构成SE(2)群,换言之,齐次变换矩阵是对应维度下表示所有刚体运动的群。
意为左乘R旋转,再沿p向量平移。
由于齐次变换矩阵拓展了一个维度(SE(2)是个3*3的矩阵,SE(3)是个4*4的矩阵,无法直接和对应维数下的坐标相乘),规定向量和点的坐标格式如下,以便数学计算:
q点坐标:,原点坐标
,向量
。
规则总结如下:
- 向量的和与差仍然是向量。
- 向量与点的和是一个点。
- 两个点之间的差是一个向量。
- 两个点的和没有意义。
将计算结果的最后一位舍掉,即可得到变换后的坐标:
连续的变换可以约化,下面是一些运算规则:
PS:平面内的所有运动都可以表示为刚体绕某一轴的转动。
1.3 三维
给定向量,其反对称矩阵为
。
规定向量的点积和差积如下:
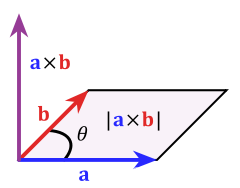
(向量的叉乘,也称为向量的叉积或矢量积,是一种在三维空间中计算两个向量之间的运算。它返回一个新的向量,它们的叉乘结果 𝐀 × 𝐁 的大小等于以 𝐀 和 𝐁 为邻边所构成的平行四边形的面积。方向垂直于这个平行四边形,且满足右手法则)
有如下运算规则
三维旋转矩阵见2.1节。
2 指数表示法
2.1 罗德里格斯公式
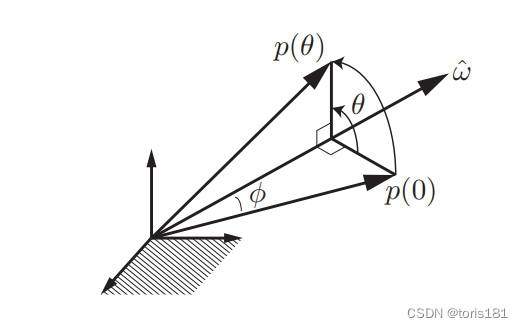
向量绕单位旋转轴
以单位角速度旋转t时间到
。
,初始条件
。积分得到:
,展开
,
将下式带入:
得到罗德里格斯公式:
将替换为
,可以得到
此三个旋转矩阵分别将被作用物体绕x、y、z轴旋转度。
对于任意的单位向量,带入公式可得
其中指
,其中
指
。
三维旋转矩阵属于群SO(3)
给定 R ∈ SO(3),总能找到一个 θ ∈ [0, π] 和一个单位旋转轴 ∈ R3,其中
= 1,使得
。
向量是 R 的指数坐标,而反对称矩阵
则是 R 的矩阵对数。
已知,使用罗德里格斯公式求旋转矩阵R。
已知R,可以求。
解为以下三种情况之一:
i.如果R = I,那么θ = 0,任取。
ii.如果R的际(对角线元素之和)tr R=-1,那么 ,
取以下三者之一:
iii.其它情况,
。
三维空间的齐次变换矩阵形式如下:
2.2 旋量
给定一个固定的坐标系{s},一个物体坐标系{b},以及一个可微齐次变换,其中
表示{b}相对于{s}的位形。
左乘
,得到
,
右乘
,得到
。
是表示在{b}中的角速度,
是表示在{b}中与{b}原点重合的点的线速度,
是表示在{s}中的角速度,
是表示在{s}中与{s}系原点重合的点的线速度。
可以将组合得到一个六维向量,记作旋量
.
是物体运动旋量的矩阵表示形式。
是空间运动旋量的矩阵表示形式。
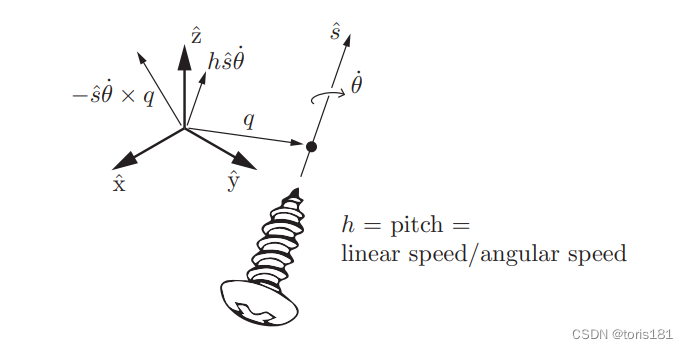
如图,运动旋量可以与旋进运动对应:
。其中
为沿着螺旋轴前进的速度,
为转动速度。
由于此种表示方法中h可能无穷大,而q可能不唯一,需要一个将正则画表达的方法,记作S:
,其中:
i.如果,则
,q为轴上任意一点;
ii.如果,则h无穷打,旋量为纯移动。
Chasles-Mozzi定理:任何刚体运动都可通过绕空间一固定轴S的旋进运动实现。
给定任意的,总能找到对应的螺旋轴S=(w,v)和标量
,满足
。计算过程如下:
i.若R=I,则
ii.利用2.2节公式先求(
被写作
),然后
已知S,也可以求。过程如下:
展开,得到
,其中
于是,若:
i.,则
ii.,则
。
向量 是 T的指数坐标,而矩阵
则是T的矩阵对数。
2.3 使用指数积公式建立正运动学模型
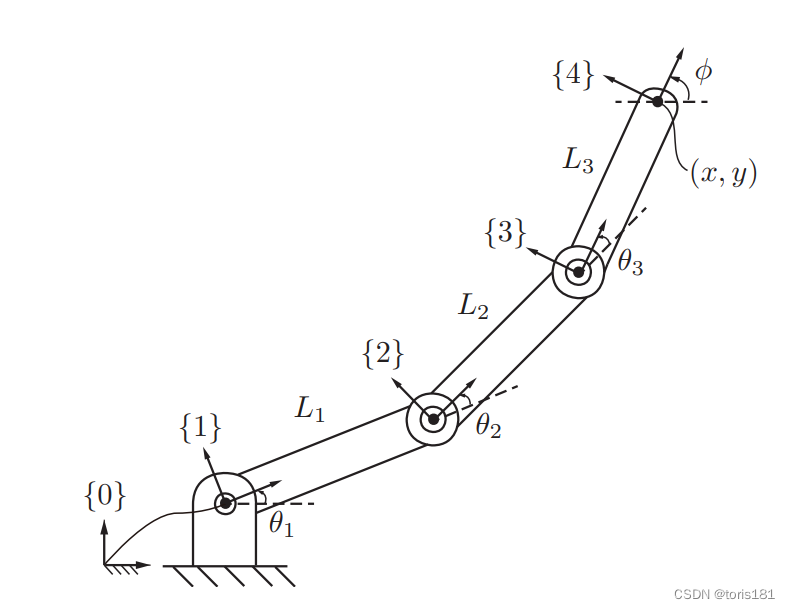
对于如图所示的机械臂,末端坐标系相对于固定坐标系{0}可以表示成,T为齐次变换矩阵,其中
,使用指数积(PoE)公式则可以写成
,其中
.相较于D-H方法而言,使用指数积方法建立正运动学模型无需使用连杆坐标系,在运动学中还能发现PoE方法的更多优点。

















 5070
5070

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









