







ORB-SLAM2详解(二)代码逻辑
本人邮箱:sylvester0510@163.com,欢迎交流讨论,
欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/
一、整体框架
ORB_SLAM的代码非常整齐,简洁,便于阅读。由于我将使用其做室外场景的单目SLAM,所以我们从mono_kitti.cc这个主程序来看整个代码。为了更加方便阅读,我将其中的关键步骤做成思维导图,这样就可以一目了然了。喜欢的朋友请点赞!~
如下图所示,程序在接收参数传递的参数后,就能够找到存放数据和参数的目录,开始运行。
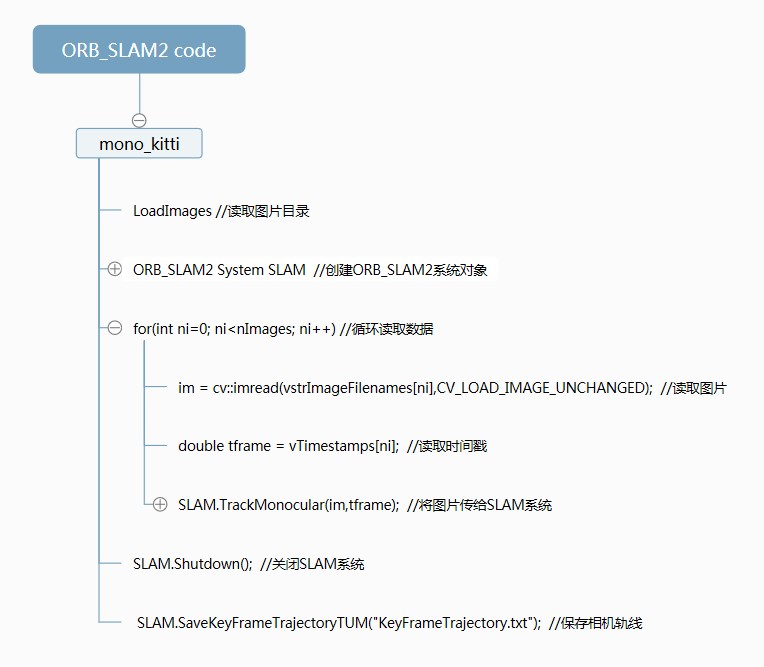
(1)首先使用LoadImages读取图片目录和时间戳文件
(2)创建ORB_SLAM2::System对象
(3)循环读取数据
(3.1)读取图片
(3.2)读取时间戳
(3.3)将图片传给SLAM系统
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1122
1122

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









