






摘要
ROS noetic中velodyne激光雷达数据,将velodyne_msgs/VelodyneScan类型的消息 /velodyne_packets,转换为sensor_msgs/PointCloud2类型的消息/velodyne_points,或使用rviz显示
起因
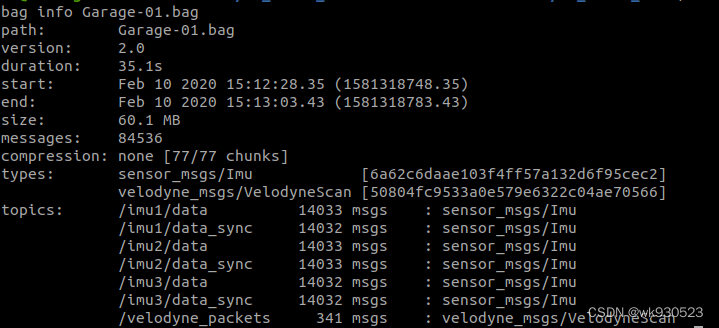
因数据标定的需要,为想要查看一下浙大的开源rosbag Garage中的雷达数据的录制环境和运动方式,但是录制的topic是velodyne_msgs/VelodyneScan类型的/velodyne_packets,而不是sensor_msgs/PointCloud2,这种数据类型直接存储了网络流数据,占用空间很小但是无法直接在rviz中查看,需要解析为sensor_msgs/PointCloud2类型
没有成功的方法
在csdn的两篇文章中看到了一个方法,
https://blog.csdn.net/wangxiao7474/article/details/108340816
https://blog.csdn.net/chengde6896383/article/details/106056354
都是运行rosrun nodelet nodelet standalone velodyne_pointcloud/CloudNodelet,但是我都没有成功,这两篇文章都发布于2020年,可能是velodyne_drive进行了更新或者ros版本进行了更新,导致这个方法不再适用
成功的方法
1、安装velodyne驱动
sudo apt install ros-noetic-velodyne
sudo apt install libpcap0.8-dev # 否则后面编译时会报错找不到pcap.h
cd ~/catkin_ws/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
catkin_make
source deve/setup.bash
2、直接启动velodyne节点
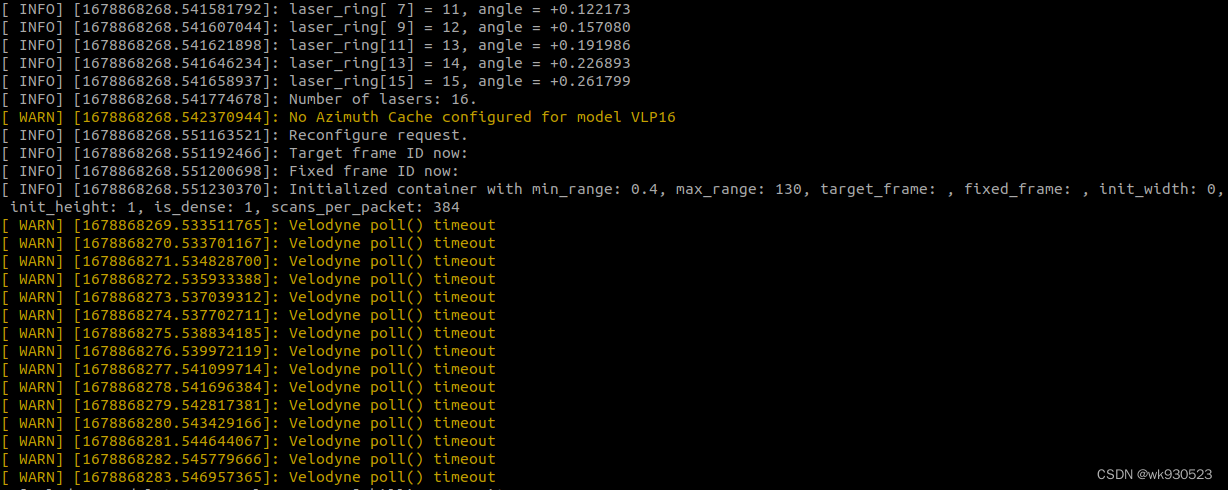
roslaunch velodyne_pointcloud VLP16_points.launch
启动后会报警告Velodyne poll() timeout,这是因为节点无法连接到velodyne硬件,我们没有连接激光雷达,自然会报这个警告,不用理会它
 这时我们启动rqt_graph可以看到,节点连接雷达硬件,将获取到的数据发布到/velodyne_packets,又重新订阅回去转换为sensor_msgs/PointCloud2类型,发布到/velodyne_points
这时我们启动rqt_graph可以看到,节点连接雷达硬件,将获取到的数据发布到/velodyne_packets,又重新订阅回去转换为sensor_msgs/PointCloud2类型,发布到/velodyne_points
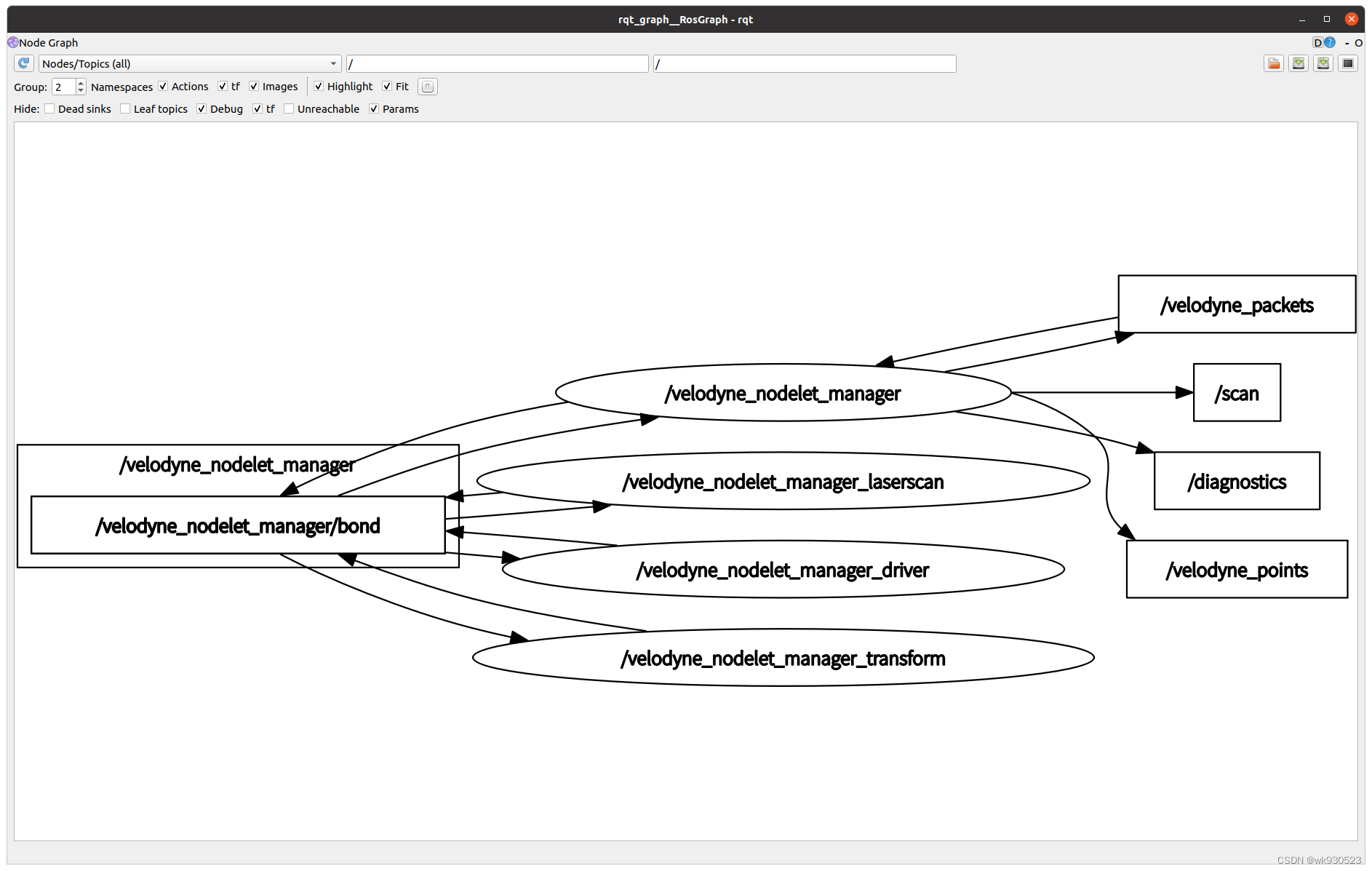 因为我们没有真的连接雷达硬件,/velodyne_packets中不会真的有消息被发布出来,但是订阅和后面的转换仍然是有效的,我们只要将录制号的rosbag进行播放,将消息发布到/velodyne_packets,velodyne节点就会将数据转换好再发布出来
因为我们没有真的连接雷达硬件,/velodyne_packets中不会真的有消息被发布出来,但是订阅和后面的转换仍然是有效的,我们只要将录制号的rosbag进行播放,将消息发布到/velodyne_packets,velodyne节点就会将数据转换好再发布出来
3、播放rosbag
rosbag play Garage-01.bag
如果topic name不匹配,remap即可
rosbag play your_data.bag /your_topic_name:=/velodyne_packets
4、使用rviz进行显示
在rviz中add topic/velodyne_points,将Fixed Frame改为velodyne即可

如果需要录制rosbag或者进行下一步算法,从velodyne_pointstopic中获取数据就可以了














 5万+
5万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









