







文章目录
一、李雅普诺夫关于稳定性的定义
系统 x ˙ = f ( x , t ) \dot x=f(x,t) x˙=f(x,t),若存在状态 x e x_e xe满足 x ˙ e ≡ 0 \dot x_e\equiv 0 x˙e≡0,则该状态为平衡状态
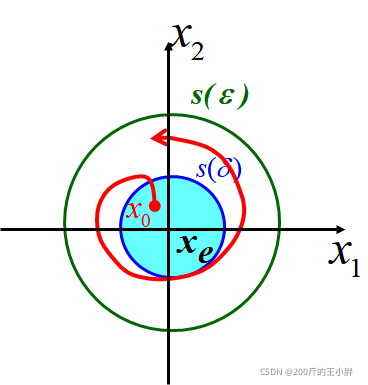
1.李氏意义下的稳定
系统对于任意选定的实数
ε
>
0
\varepsilon>0
ε>0,都存在一个实数
δ
>
0
\delta>0
δ>0,当满足
∣
∣
x
0
−
x
e
∣
∣
≤
δ
||x_0-x_e||\leq\delta
∣∣x0−xe∣∣≤δ
从任意
x
0
x_0
x0出发的解都满足
∣
∣
Φ
−
x
e
∣
∣
≤
ε
||\Phi-x_e||\leq\varepsilon
∣∣Φ−xe∣∣≤ε
则称平衡状态为李氏意义下的稳定
2.渐近稳定
解最终收敛于
x
e
x_e
xe
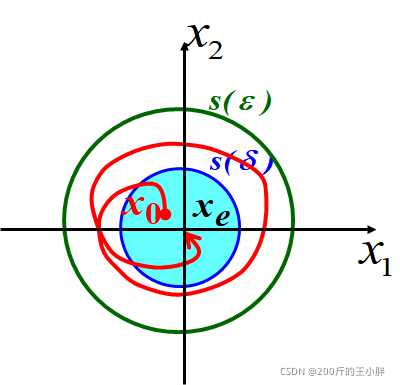
3.大范围渐近稳定
从状态空间中所有初始状态出发的轨线都具有渐近稳定性,称这种平衡状态 x e x_e xe为大范围内渐近稳定
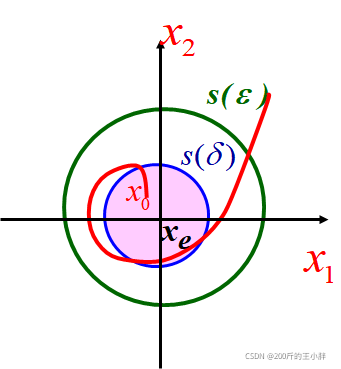
4.不稳定
不管
δ
\delta
δ有多小,只要由
S
(
δ
)
S(\delta)
S(δ)内出发的状态轨迹超出
S
(
ε
)
S(\varepsilon)
S(ε) 以外,则称此平衡状态是不稳定的
二、李雅普诺夫第一法
1.线性系统的稳定判据
李氏稳定(状态稳定)的充要条件:系统矩阵A的全部特征值位于复平面的左半部
输出稳定的充要条件:传递函数
W
(
s
)
=
C
(
S
I
−
A
)
−
1
B
W(s)=C(SI-A)^{-1}B
W(s)=C(SI−A)−1B的全部极点位于复平面左半部
PS:输出稳定不一定状态稳定,可能存在零极点对消
2.非线性系统的稳定判据
非线性系统状态方程
x
˙
=
f
(
x
)
\dot x=f(x)
x˙=f(x)
f
(
x
)
=
[
f
1
,
f
2
⋯
f
n
]
f(x)=[f_1,f_2\cdots f_n]
f(x)=[f1,f2⋯fn]
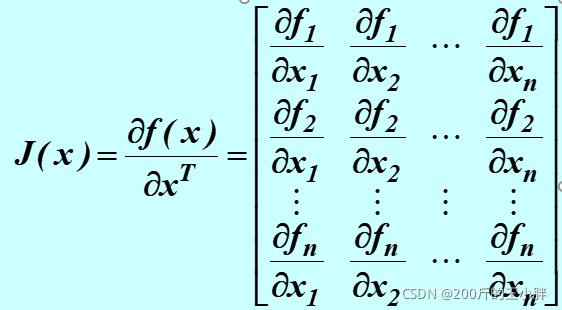
向量函数的雅可比矩阵:
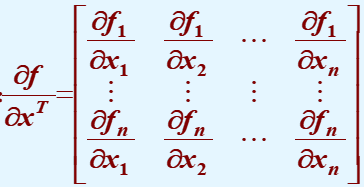
原非线性状态方程化为线性状态方程
Δ
x
˙
=
∂
f
∂
x
T
Δ
x
\Delta\dot x=\frac{\partial f}{\partial x^T}\Delta x
Δx˙=∂xT∂fΔx
其中
Δ
x
=
x
−
x
e
\Delta x=x-x_e
Δx=x−xe
然后可套用线性系统的稳定判据
三、李雅普诺夫第二法
1.标量函数的定号性
V
(
x
)
V(x)
V(x)为x所定义的标量函数,对于任何非零矢量x,如果:
1)
V
(
x
)
>
0
V(x)>0
V(x)>0,则为正定的
2)
V
(
x
)
≥
0
V(x)\geq0
V(x)≥0,则为半正定的
3)
V
(
x
)
<
0
V(x)<0
V(x)<0,则为负定的
3)
V
(
x
)
≤
0
V(x)\leq0
V(x)≤0,则为半负定的
2.稳定性原理
1、
V
(
x
)
V(x)
V(x)正定,
V
˙
(
x
)
\dot V(x)
V˙(x)负定,在原点是渐近稳定的
并且如果
∣
∣
x
∣
∣
−
>
∞
,
V
(
x
)
−
>
∞
||x||->\infty,V(x)->\infty
∣∣x∣∣−>∞,V(x)−>∞,则系统是大范围渐近稳定的
2、
V
(
x
)
V(x)
V(x)正定,
V
˙
(
x
)
\dot V(x)
V˙(x)半负定,在非零状态
V
˙
(
x
)
\dot V(x)
V˙(x) 不恒为 0,在原点是渐近稳定的
3、
V
(
x
)
V(x)
V(x)正定,
V
˙
(
x
)
\dot V(x)
V˙(x)半负定,在非零状态
V
˙
(
x
)
\dot V(x)
V˙(x) 恒为 0,在原点是李氏意义下的稳定
4、
V
(
x
)
V(x)
V(x)正定,
V
˙
(
x
)
\dot V(x)
V˙(x)正定,在原点是不稳定的
5、
V
(
x
)
V(x)
V(x)正定,
V
˙
(
x
)
\dot V(x)
V˙(x)正半定,在非零状态
V
˙
(
x
)
\dot V(x)
V˙(x) 不恒为 0,在原点是不稳定的
6、
V
(
x
)
V(x)
V(x)正定,
V
˙
(
x
)
\dot V(x)
V˙(x)正半定,在非零状态
V
˙
(
x
)
\dot V(x)
V˙(x) 恒为 0,在原点是李氏意义下的稳定
四、李雅普诺夫方法在线性系统中的应用
选定正定二次型函数
V
(
x
)
V(x)
V(x)为李氏函数
V
(
x
)
=
x
T
P
x
V(x)=x^TPx
V(x)=xTPx
V
˙
(
x
)
=
x
T
(
P
A
+
A
T
P
)
x
\dot V(x)=x^T(PA+A^TP)x
V˙(x)=xT(PA+ATP)x
令
Q
=
−
(
P
A
+
A
T
P
)
Q=-(PA+A^TP)
Q=−(PA+ATP)
如果Q正定,则系统是大范围渐进稳定的
判定稳定性的步骤:
1、选取正定矩阵Q(通常是单位阵)
2、由
Q
=
−
(
P
A
+
A
T
P
)
Q=-(PA+A^TP)
Q=−(PA+ATP)求P
3、判断P的正定性
4、稳定性结论
五、李雅普诺夫方法在非线性系统中的应用
1.雅可比矩阵法
x
˙
=
f
(
x
)
\dot x=f(x)
x˙=f(x)
判定稳定性的步骤:
1、求雅可比矩阵
2、克拉索夫斯基表达式:
Q
(
x
)
=
−
[
J
T
+
J
]
Q(x)=-[J^T+J]
Q(x)=−[JT+J]
3、判断Q的正定性
4、稳定性结论
PS:克拉索夫斯基定理只是渐近稳定的一个充分条件不是必要条件
2.变量梯度法
1、设
∇
V
=
\nabla V=
∇V=
2、
V
˙
(
x
)
=
(
∇
V
)
T
x
˙
\dot V(x)=(\nabla V)^T\dot x
V˙(x)=(∇V)Tx˙
限定
V
˙
(
x
)
\dot V(x)
V˙(x)为负定
3、利用
n
(
n
−
1
)
2
\frac{n(n-1)}{2}
2n(n−1)个旋度方程确定
∇
V
\nabla V
∇V中的未知数

4、计算并验证V正定性

5、确定系统渐进稳定的范围















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











