






作为连续两届参加中国机器人及人工智能大赛并拿下国一的"老兵",我想跟大家分享一些在自主巡航项目中的实战经验。这个项目看起来简单,但真正做起来才发现里面有太多坑需要踩,希望我的一些经验能让你少走弯路。
一、项目实战理解
刚开始接触这个项目时,我和团队都以为主要难点在于算法的精巧设计。结果第一年比赛只拿了个国二,回来复盘才发现,比赛成败的关键不在于算法多高级,而在于系统的鲁棒性和稳定性。
场地中那些任务信息图像看似简单,但在不同光照、不同角度下识别难度差异很大。记得去年决赛时,有支985高校的队伍用了很牛的深度学习算法,结果在现场因为光照问题,识别率直接掉到40%以下,连基本的任务点都没完成。
核心任务拆解:
- 语音识别与播报(10分)
- 三次任务点识别与到达(60分)
- 终点到达(10分)
- 技术文档(10分)
首先要确保60分的基础分稳稳拿到,才有机会冲击更高分数。
二、软件架构实战经验
ROS框架设计
第一年我们用了单体架构,所有功能都堆在一个节点里,结果调试和找bug特别痛苦。第二年重构为多节点设计:
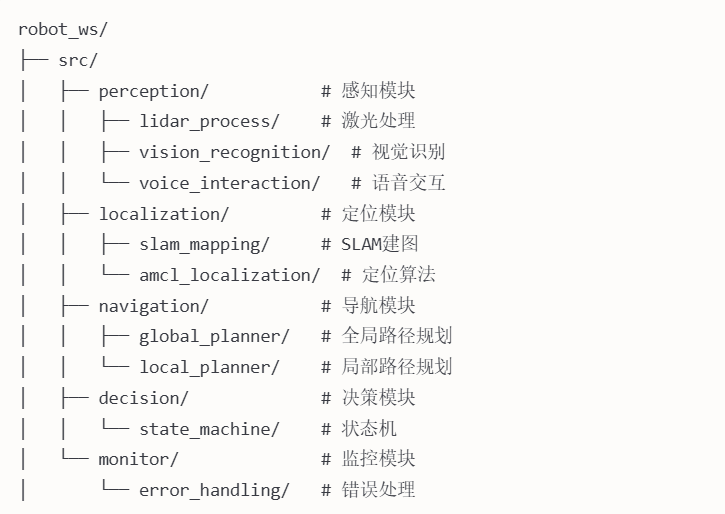
这种模块化设计好处太多了:
- 团队可以并行开发
- 单元测试变得简单
- 找bug和调试效率提高10倍不止
实战代码技巧
1. 激光数据预处理
比赛中经常会遇到激光数据异常的情况,这段代码帮我们解决了很多问题:
// 激光雷达数据异常处理函数
sensor_msgs::LaserScan filterScan(const sensor_msgs::LaserScan& scan) {
sensor_msgs::LaserScan filtered = scan;
// 1. 剔除无效值
for (size_t i = 0; i < scan.ranges.size(); i++) {
if (scan.ranges[i] < scan.range_min ||
scan.ranges[i] > scan.range_max ||
!std::isfinite(scan.ranges[i])) {
filtered.ranges[i] = scan.range_max; // 将无效值设为最大值
}
}
// 2. 中值滤波 (三点滑动窗口)
for (size_t i = 1; i < filtered.ranges.size() - 1; i++) {
std::vector<float> window = {
filtered.ranges[i-1],
filtered.ranges[i],
filtered.ranges[i+1]
};
std::sort(window.begin(), window.end());
filtered.ranges[i] = window[1]; // 取中值
}
// 3. 处理反光区域数据跳变
for (size_t i = 2; i < filtered.ranges.size(); i++) {
float diff = std::abs(filtered.ranges[i] - filtered.ranges[i-1]);
if (diff > 0.5 && filtered.ranges[i] > 5.0) {
filtered.ranges[i] = filtered.ranges[i-1];
}
}
return filtered;
}2. 视觉自适应增强
不同场地光照差异很大,这段代码可以自动调整图像处理参数
def adaptive_image_processing(image):
"""根据图像特性自动调整处理参数"""
# 计算图像亮度直方图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
hist = cv2.calcHist([gray], [0], None, [256], [0, 256])
# 计算亮度均值和标准差
mean_brightness = np.mean(gray)
std_brightness = np.std(gray)
# 根据亮度特性调整参数
if mean_brightness < 80: # 低光环境
alpha = 1.5 # 增加对比度
beta = 25 # 增加亮度
elif mean_brightness > 180: # 高光环境
alpha = 0.7 # 降低对比度
beta = -20 # 降低亮度
else: # 正常光照
alpha = 1.0
beta = 0
# 应用亮度调整
adjusted = cv2.convertScaleAbs(image, alpha=alpha, beta=beta)
# 光照均衡化处理
if std_brightness > 60: # 光照不均匀
# 转到LAB色彩空间进行亮度均衡化
lab = cv2.cvtColor(adjusted, cv2.COLOR_BGR2LAB)
l, a, b = cv2.split(lab)
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8,8))
cl = clahe.apply(l)
merged = cv2.merge((cl, a, b))
return cv2.cvtColor(merged, cv2.COLOR_LAB2BGR)
else:
return adjusted这个函数在我们决赛中立了大功,解决了场馆顶部射灯照射导致的图像过曝问题。
三、核心算法实战选择
SLAM定位算法
我们测试过三种主流SLAM算法的性能表现

实战经验: 正式比赛我们用Cartographer,虽然占用资源多,但闭环检测能力强,精度高。关键参数调优是:
# cartographer.lua中的关键参数
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 80 # 减小以降低延迟
TRAJECTORY_BUILDER_2D.min_range = 0.15 # 设置为激光雷达最小值
TRAJECTORY_BUILDER_2D.max_range = 12.0 # 设置为激光雷达最大值
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 5.0 # 处理遮挡
POSE_GRAPH.optimization_problem.huber_scale = 1e2 # 提高优化稳定性
POSE_GRAPH.constraint_builder.min_score = 0.55 # 提高约束阈值视觉识别方案
不要迷信单一的深度学习模型,我们的最佳方案是多模型融合:
def ensemble_prediction(image):
"""多模型融合预测"""
# 使用不同模型进行预测
yolo_results = yolo_model.predict(image)
resnet_results = resnet_model.predict(image)
# 目标检测结果融合
all_boxes = []
# 添加YOLO检测框
for det in yolo_results:
x1, y1, x2, y2 = det['bbox']
confidence = det['confidence'] * 0.6 # YOLO权重
label = det['class']
all_boxes.append([x1, y1, x2, y2, confidence, label])
# 添加ResNet检测框
for det in resnet_results:
x1, y1, x2, y2 = det['bbox']
confidence = det['confidence'] * 0.4 # ResNet权重
label = det['class']
all_boxes.append([x1, y1, x2, y2, confidence, label])
# 非极大值抑制
final_boxes = non_maximum_suppression(all_boxes, 0.5)
# 标签投票
final_results = []
for box_group in final_boxes:
# 计算平均边界框
avg_box = calculate_average_box(box_group)
# 标签投票
labels = [b[5] for b in box_group]
label = most_common(labels)
# 计算置信度
confidence = sum([b[4] for b in box_group])
final_results.append({
'bbox': avg_box,
'class': label,
'confidence': confidence
})
return final_results这种多模型融合方法在不稳定光照条件下识别率要高15%左右,虽然计算开销大了点,但值得。
四、导航平滑性优化
速度平滑滤波器
导航卡顿的核心问题是速度命令变化过于剧烈。我们实现了一种基于双指数平滑的速度命令过滤器:
class VelocityFilter {
public:
VelocityFilter(double alpha = 0.3, double beta = 0.1)
: alpha_(alpha), beta_(beta),
s_x_(0), s_y_(0), s_theta_(0),
b_x_(0), b_y_(0), b_theta_(0),
initialized_(false) {}
geometry_msgs::Twist filter(const geometry_msgs::Twist& raw_cmd) {
if (!initialized_) {
// 初始化
s_x_ = raw_cmd.linear.x;
s_y_ = raw_cmd.linear.y;
s_theta_ = raw_cmd.angular.z;
b_x_ = 0;
b_y_ = 0;
b_theta_ = 0;
initialized_ = true;
return raw_cmd;
}
// 双指数平滑滤波器
// 更新级数项
double s_x_prev = s_x_;
double s_y_prev = s_y_;
double s_theta_prev = s_theta_;
s_x_ = alpha_ * raw_cmd.linear.x + (1 - alpha_) * (s_x_prev + b_x_);
s_y_ = alpha_ * raw_cmd.linear.y + (1 - alpha_) * (s_y_prev + b_y_);
s_theta_ = alpha_ * raw_cmd.angular.z + (1 - alpha_) * (s_theta_prev + b_theta_);
// 更新趋势项
b_x_ = beta_ * (s_x_ - s_x_prev) + (1 - beta_) * b_x_;
b_y_ = beta_ * (s_y_ - s_y_prev) + (1 - beta_) * b_y_;
b_theta_ = beta_ * (s_theta_ - s_theta_prev) + (1 - beta_) * b_theta_;
// 构造平滑后的速度命令
geometry_msgs::Twist filtered_cmd;
filtered_cmd.linear.x = s_x_ + b_x_;
filtered_cmd.linear.y = s_y_ + b_y_;
filtered_cmd.angular.z = s_theta_ + b_theta_;
return filtered_cmd;
}
private:
double alpha_; // 数据项权重
double beta_; // 趋势项权重
// 平滑值
double s_x_, s_y_, s_theta_;
// 趋势值
double b_x_, b_y_, b_theta_;
bool initialized_;
};TEB参数优化
通过对比测试,我们总结出一套最优的TEB局部规划器参数:
TebLocalPlannerROS:
# 机器人配置
max_vel_x: 0.35
max_vel_x_backwards: 0.1
max_vel_y: 0.35
max_vel_theta: 0.8
acc_lim_x: 0.2
acc_lim_y: 0.2
acc_lim_theta: 0.3
min_turning_radius: 0.0
# 轨迹配置
teb_autosize: True
dt_ref: 0.4
dt_hysteresis: 0.1
global_plan_overwrite_orientation: True
max_global_plan_lookahead_dist: 2.0
feasibility_check_no_poses: 5
# 优化配置
no_inner_iterations: 5
no_outer_iterations: 4
penalty_epsilon: 0.05
weight_max_vel_x: 1.0
weight_max_vel_y: 1.0
weight_max_vel_theta: 1.0
weight_acc_lim_x: 2.0
weight_acc_lim_y: 2.0
weight_acc_lim_theta: 2.0
weight_kinematics_nh: 1000.0
weight_kinematics_forward_drive: 100.0
weight_optimaltime: 1.0
weight_obstacle: 50.0
weight_inflation: 0.1
# 平滑参数(关键部分)
weight_adapt_factor: 2.0
enable_homotopy_class_planning: False
simple_exploration: False在比赛间隙调整这些参数时,我习惯按照这个顺序调整:先调速度限制,再调加速度限制,然后是权重参数。最关键的三个参数是weight_kinematics_forward_drive、weight_obstacle和acc_lim_theta。
五、实战踩坑与应对
1. 机械结构问题
第一年比赛,我们的摄像头固定方式太简单,用的3D打印支架。结果比赛中底盘急停导致摄像头大幅晃动,视觉识别全乱了。
解决方案: 第二年改用铝合金框架 + 减震垫,效果好很多。记住一点:不要低估机械振动对传感器的影响。
2. 光照变化
比赛场地光照往往是最大变数。记得去年西安的比赛,场馆靠窗一侧阳光直射,另一侧则很暗。
解决方案:
- 视觉算法做好自适应处理
- 提前20分钟进场调试
- 准备多套参数配置,快速切换
3. 定位丢失
导航过程中定位丢失是常见问题。一个队友不小心走进场地或者场地有高反光材料,都可能导致定位失败。
def emergency_relocation():
"""定位丢失应急处理"""
# 1. 停止当前导航
stop_navigation()
# 2. 切换为原地旋转模式采集数据
cmd_vel = rospy.Publisher('/cmd_vel', Twist, queue_size=1)
twist = Twist()
twist.angular.z = 0.5 # 缓慢旋转
# 发送旋转命令5秒
start_time = rospy.Time.now()
rate = rospy.Rate(10)
while (rospy.Time.now() - start_time).to_sec() < 5.0:
cmd_vel.publish(twist)
rate.sleep()
# 3. 停止旋转
twist.angular.z = 0.0
cmd_vel.publish(twist)
# 4. 尝试使用特征点匹配重定位
success = feature_based_relocalization()
if success:
rospy.loginfo("重定位成功,继续导航")
resume_navigation()
else:
rospy.logwarn("重定位失败,切换到紧急模式")
switch_to_emergency_mode()
六、总结与建议
如果让我给参加自主巡航项目的同学们一些建议,那就是:
- 基础分最重要:确保导航稳定可靠,拿到60分基础分,再追求更高分数
- 系统鲁棒性大于算法先进性:算法再先进,如果不够稳定,在比赛中也会翻车
- 充分测试各种极端情况:刻意制造干扰和异常,测试系统恢复能力
- 做好知识积累和经验传承:记录所有问题和解决方案,避免后来者重复踩坑
技术上,我的几点关键建议:
- 多传感器融合是解决单一传感器不稳定的最佳方案
- 参数自适应比固定参数在实际比赛中可靠得多
- 故障容错机制是区分一般队伍和优秀队伍的关键
最后,希望大家都能享受这个比赛带来的技术挑战!我当年就是在比赛中学到了很多东西,今年我依旧会来参加今年的比赛,如果需要去年的工作空间或者今年的指导私聊博主,非常感谢!!!

















 3772
3772

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









