






1. MOT评价指标
MOT:multiple object tracking
评价出发点:
- 所有出现的目标都要及时能够找到;
- 目标位置要尽可能与真实目标位置一致;
- 每个目标都应该被分配一个独一无二的ID,并且该目标分配的这个ID在整个序列中保持不变。
评价指标数学模型:
评价过程的步骤:
- 建立 目标与假设最优间的最优一一对应关系,称为correspondence
- 对所有的correspondence,计算位置偏移误差
- 累积结构误差 a. 计算漏检数 b. 计算虚警数(不存在目标却判断为目标) c. 跟踪目标发生跳变的次数
2. 实现思路
- 确定对应关系
如何确定对应关系,最直接的想法就是使用最邻近法?具体而言,就是比较groundtruth与预测框中心的距离。
另一个问题,如果没有检测到目标呢,所以需要设置一个距离阈值。
第三个问题,距离使用什么距离?欧氏距离。(曼哈顿距离、余弦距离、马氏距离不考虑,具体了解每种距离的物理意义和适用的情形、度量的特性)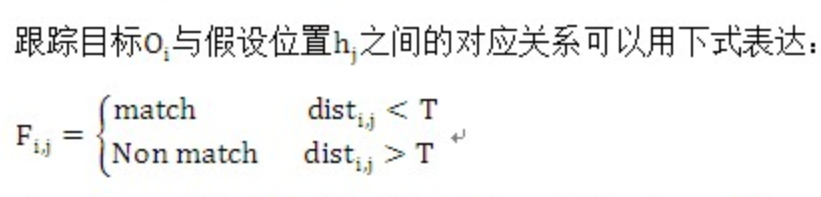
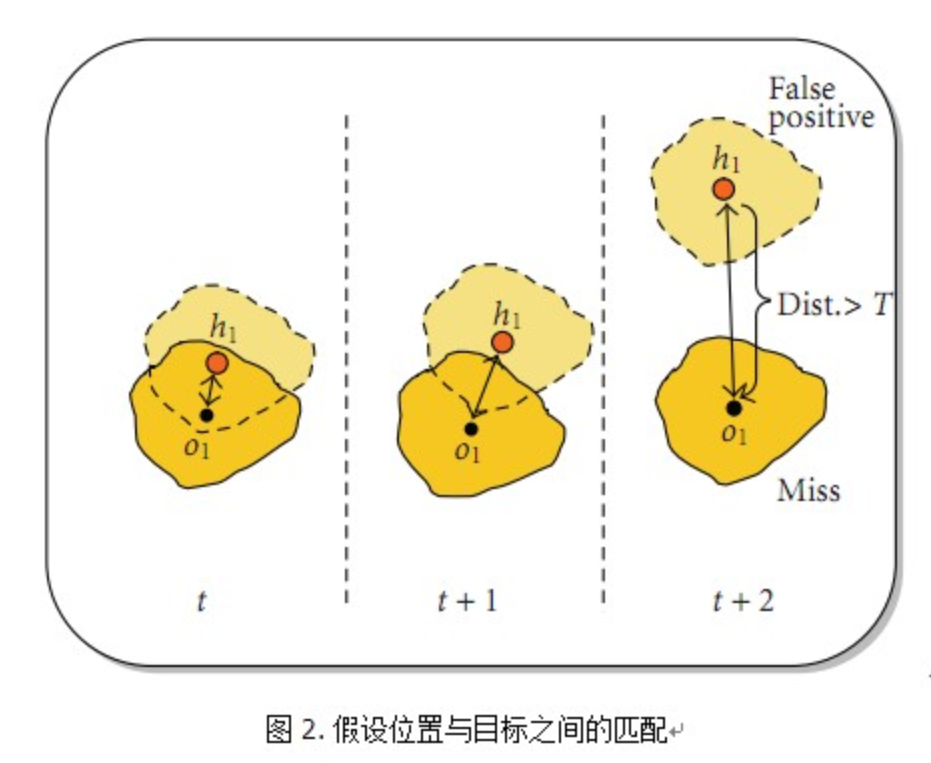
简而言之,就是只要在一定的距离范围内,就认为是匹配到了目标。
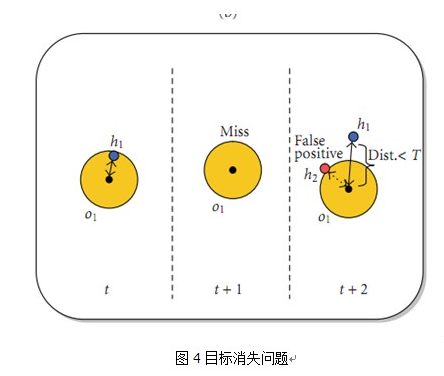
- 如何刻画追踪一致性(持续跟踪)
追踪一致性:追踪预测目标和对应目标长时间保持对应关系不变的能力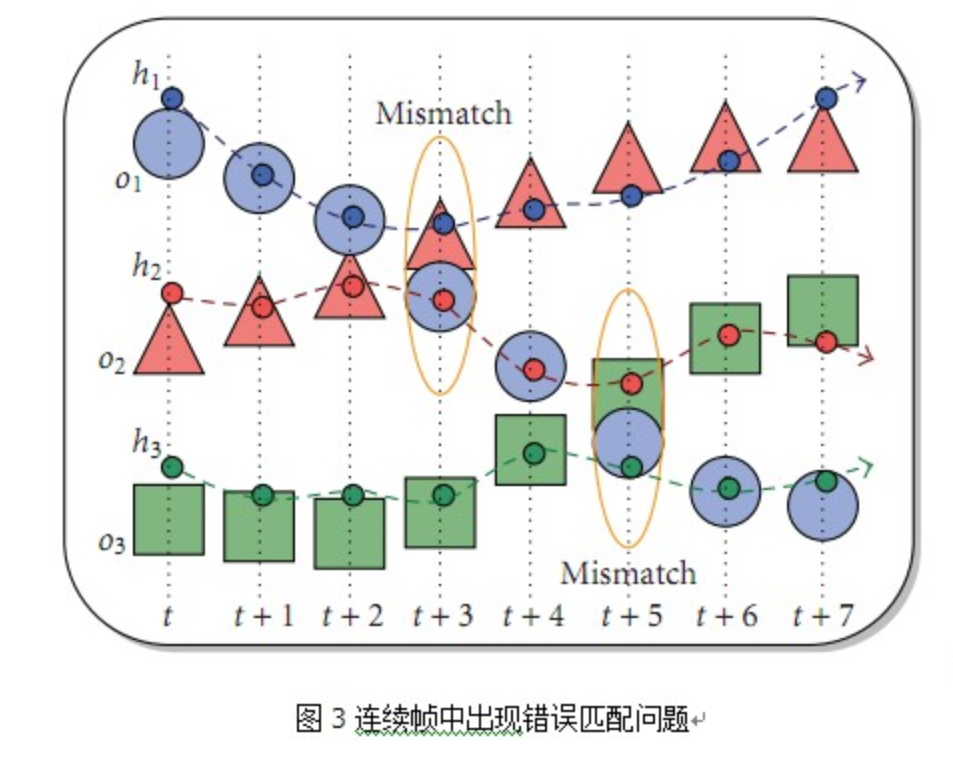
上图分析:O1在正确匹配三帧之后发生了误匹配问题。
总结:误匹配问题多发生在两个跟踪目标很接近的时候。
问题与思考:如何记录整个目标在整个帧频中的无匹配次数。
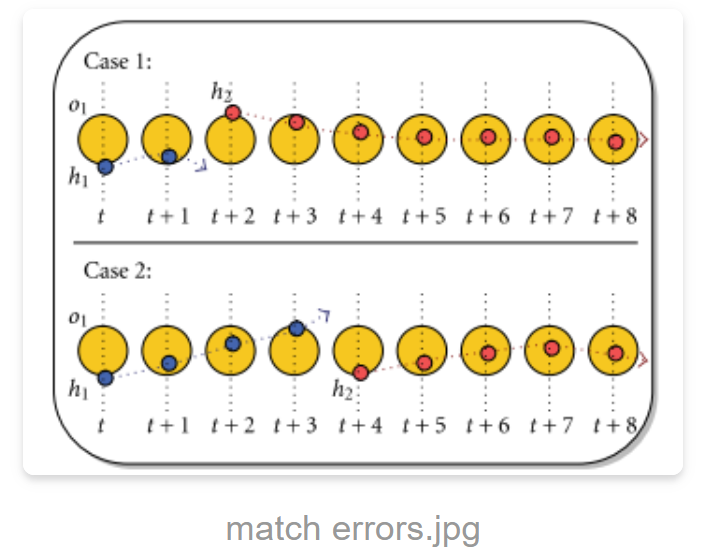
蓝色点:匹配到了错误的目标
红色点:匹配到了正确的目标
上述示意图都在跟踪对象O1,如果记录无匹配次数的话,整个过程发生一次无匹配;
如果记录无匹配的帧数,case1是2次误匹配,case2是4次误匹配
采用最优匹配序列对整个跟踪链进行统计。具体方法如下:
- 构建假设位置与目标的匹配序列,Mt = {(Oi, Hi)} (该变量表示到t帧为止所建立的匹配序列)。在t+1帧,如果Oi的匹配对象是Hk, 发生误匹配。同时将(Oi, Hk)更新到M(t+1)中。
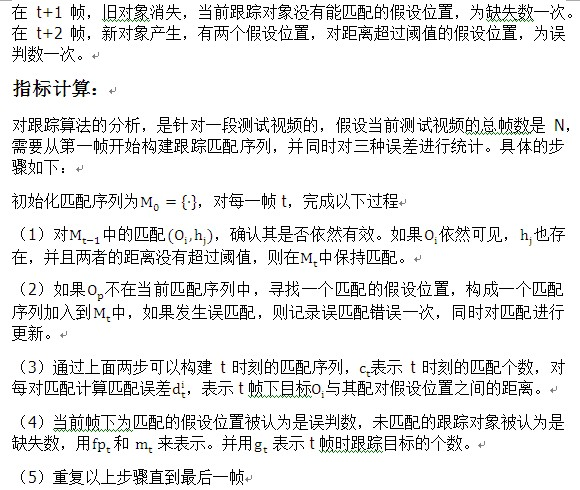
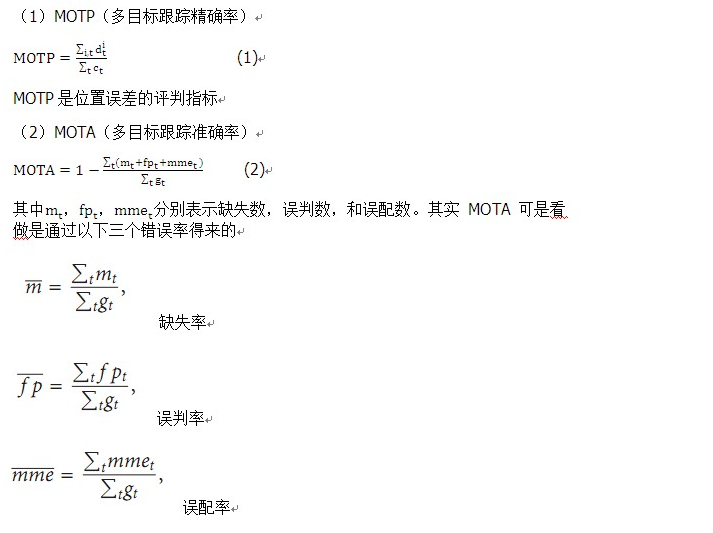
3. 计算指标















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









