







本文章收录在黑鲸智能系统知识库-黑鲸智能系统知识库成立于2021年,致力于建立一个完整的智能系统知识库体系。我们的工作:收集和整理世界范围内的学习资源,系统地建立一个内容全面、结构合理的知识库。
作者博客:途中的树
动机
- 机器人肯定是在3d世界活动的
- 避免碰撞、运动规划和定位需要准确的三维世界模型
- 已知:来自已知机器人和传感器位置的3D点云数据
- 问题:如何构建环境的三维结构?
传感器
构建3D世界需要的传感器
- 激光扫描
- 范围扫描仪测量到最近的障碍物的距离

-
kinect相机
Kinect是由微软开发,应用于Xbox 360和Xbox One主机的周边设备。它让玩家不需要手持或踩踏控制器,而是使用语音指令或手势来操作Xbox 360和Xbox One的系统界面。它也能捕捉玩家全身上下的动作,用身体来进行游戏,带给玩家“免控制器的游戏与娱乐体验”。此设备是微软研究院的研究成果之一。

3D环境比较流行的表现方法
- 点云 Point clouds
- 体素网格 Voxel grids
- 高度地图 Height maps
- 表面地图 Surface maps
- 网状结构 Meshes
- 距离场 Distance fields
- …
点云 Point clouds
-
世界框架中的一组三维数据点
-
由激光扫描仪或深度相机等获得
-
优点
- 数据无离散性
- 绘图区域无限制
-
缺点
- 内存不受限制
- 位置查询没有确定的访问时间
- 对自由空间或未知空间不作区分

-
使用点云高效的位置查询方法
- 原始的实现(列表、数组)对位置查询有线性的复杂性
- 通过kd-trees获得更有效的解决方案
- kd-trees 在k维度上运行
- 空间分割数据结构用于组织k维的点
- 有右图为二进制空间划分
- 搜索/插入/删除平均为 logarithmic 对数时间
3D体素网格
体素voxel网格是用固定大小的立方块作为最小单元,来表示三维物体的一种数据结构。
体素可以看成粗略版的点云。三维空间分割上的最小单位,参考二维空间的像素pixel
- 优点:
- 体积表示法
- 恒定的访问时间
- 概率性更新
- 缺点
- 内存要求。完整的网格被分配在内存中
- 地图的范围必须是已知的/猜测的
- 分散化错误

2.5D 地图绘制:高度地图
- 对落入一个二维单元格的所有点进行平均,并将其视为高度值
- 优点
- 内存效率高(二维)。
- 恒定时间访问
- 缺点
- 没有纵向的物体
- 只展示了一个级别的信息

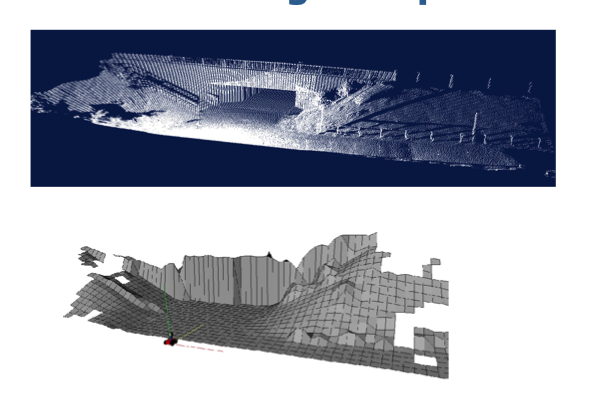
多层平面地图Multi-level surface maps (MLS)
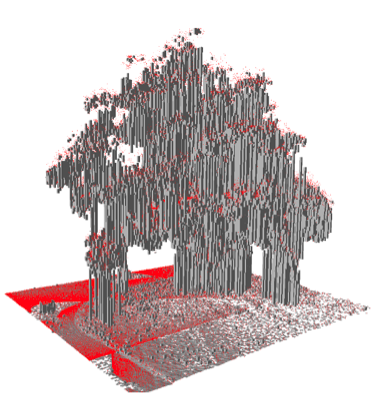
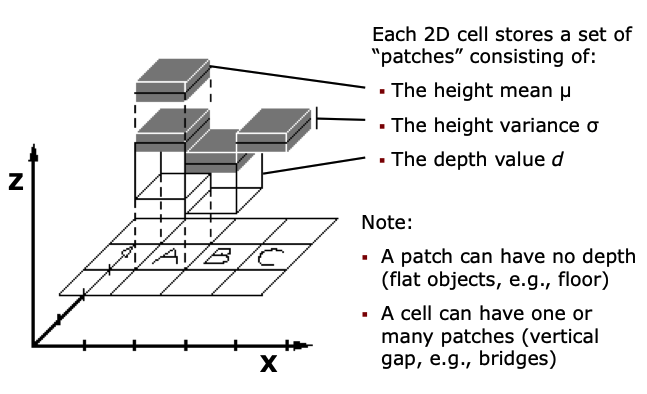
- 在多层级平面地图中MLS,每个2D的单元都储存着一组“补丁”包括
- 平均高度 μ \mu μ
- 高度的方差 σ \sigma σ
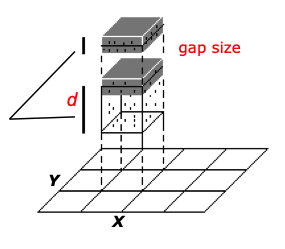
- 深度值 d d d
- 补丁也可能不包含深度信息(平面物体)
- 一个单元可能包含一个或者多个补丁(垂直间隔,例如桥)
从点云转换到到MLS地图
- 确定点云中的每个3D点对应的2D单元
- 根据threshold计算每个单元每个点(补丁)的垂直间隔
- 确定每个垂直补丁的相关信息
- 高度和方差
- 深度:最高和最低测量值之差
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-sUpmuC6G-1627291912654)(https://raw.githubusercontent.com/Uzizkp/image-host/master/img/picgo/20210720154323.png)]
MLS Maps
- 优点
- 每个二维单元可以代表多个表面
- 缺点
- 没有办法表示体积,在垂直维度上进行了离散。
- 在MLS地图中,有几项任务并不是直接就能实现的
八叉树表示 Octree-Based Representation
八叉树(英语:octree)是一种树形数据结构,每个内部节点都正好有八个子节点。八叉树常用于分割三维空间,将其递归细分为八个卦限。八叉树是四叉树在三维空间中的对应,在三维图形、三维游戏引擎等领域有很多应用。
-
树形结构
-
递归地将空间细分为八个空间 octants
- 实体几何中的octant是欧几里得三维坐标系中由坐标符号定义的八个分部之一。它类似于二维象限
-
根据需要分配空间体积
-
一种更智能的3d网格
-
优点
- 全部都是3D模型
- 本身就适应多分辨率
- 内存效率高,只在需要时分配空间
- 可以进行概率更新
-
缺点
- 实现起来很困难(内存分配、更新、地图文件…)
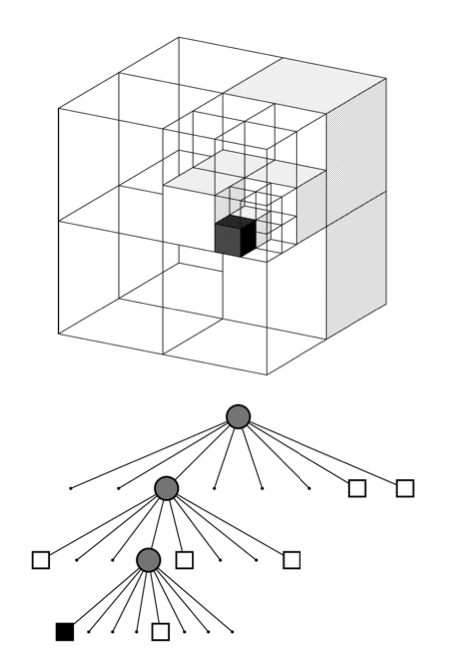

例子:多分辨率查询
- P ( m i ) = m a x j = 1...8 P ( m i j ) P(m_i)=max_{j=1...8}P(m_{i_j}) P(mi)=maxj=1...8P(mij) with m i j ∈ C h i l d r e n ( m i ) m_{i_j} \in Children(m_i) mij∈Children(mi)
- 这个分布函数指出了不同分辨率下的3D环境表示
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-I1EUizkx-1627291912665)(https://raw.githubusercontent.com/Uzizkp/image-host/master/img/picgo/20210720182212.png)]
利用光线追踪进行地图更新
- 从传感器原点到地图中的端点沿光束投射的射线
- 将最后一个体素标记为被占用,射线上的所有其他体素为空。
- 考虑到机器人的姿势,测量结果以概率方式整合(递归二元贝叶斯过滤器)。

概率地图更新
- 占用概率被建模为递归二进制贝叶斯过滤器

- 使用对数log-odds notation高效更新

例子(youtube): Freiburg computer science campus (292 x 167 x 28 m3, 20 cm resolution)
Octree in memory: 130 MB
3D Grid: 649 MB
Octree file: 2 MB (bit stream)
3D环境比较流行的表现方法:符号距离函数
下面再介绍一种3D环境表示方法——距离场
符号距离函数Signed Distance Function是某度量空间X中的一个集合Ω的函数,决定X中任一点到 Ω边界∂Ω的距离,并且由x是在Ω内还是Ω外确定其SDF的正负号:当x在Ω内时,SDF为正;当x在Ω外时,SDF为负。
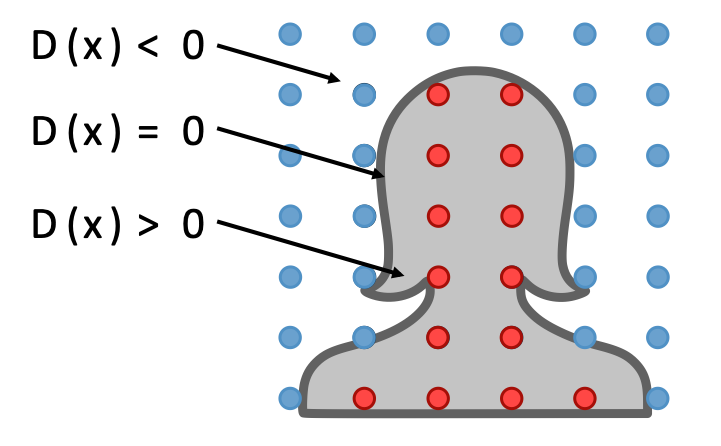
Key idea
- 不表示占用值,而表示每个单元到最近的测量表面的距离
- 可以在亚体素精度下提取表面
Grid map VS SDF
- 网格地图:明确表示网格是否占用
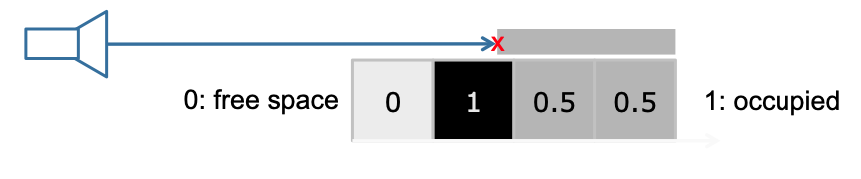
-
SDF : 隐含表示网格占用状态
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2JIIW0SE-1627291912703)(https://raw.githubusercontent.com/Uzizkp/image-host/master/img/picgo/20210720201540.png)]
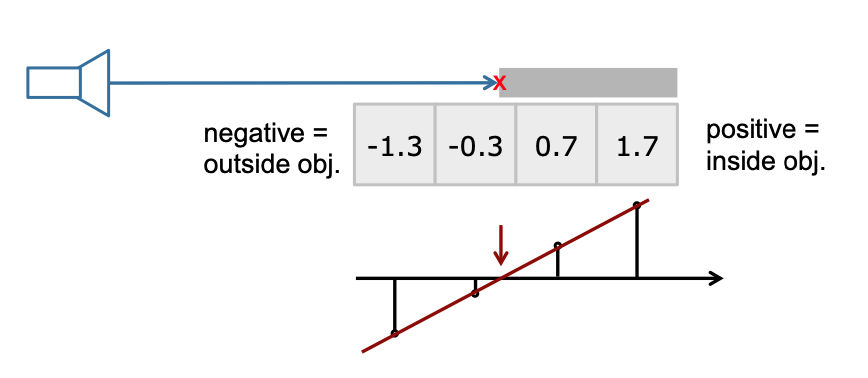
SDF 方法
- 计算符号距离值
- 使用内插法提取曲面
- 物体表面位于零点交叉点的
SDF性质
- 噪声在多次测量中可以被抵消
- 可以在亚体素精度下提取零点交叉点
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Q5LL7hfN-1627291912713)(https://raw.githubusercontent.com/Uzizkp/image-host/master/img/picgo/20210720202421.png)]
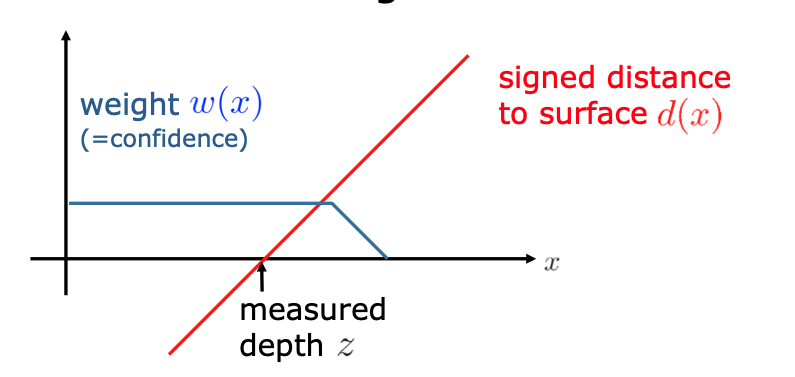
多重测量的加权函数
- 对于沿着光束的每个体素 x x x,根据其置信度 w ( x ) w(x) w(x)来衡量观察结果
- 小权重确保在有新的观察结果时可以更新数值
- 对于沿着光束的每个体素,存储
- 到下一个表面的距离 D D D
- 权重 W W W
截断SDF (TSDF)
- 从深度图像计算SDF
- 沿着光束计算体素到观察表面的距离
- 为了提高效率,只更新端点周围的一个小区域(截断)
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-SMKpP2cu-1627291912724)(https://raw.githubusercontent.com/Uzizkp/image-host/master/img/picgo/20210720212705.png)]
权重更新
-
对于每个体素,计算其所有测量值的加权平均值
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-aZPIwUHF-1627291912732)(https://raw.githubusercontent.com/Uzizkp/image-host/master/img/picgo/20210720212847.png)]
- 当新的数据到达时,根据以下原则更新每个体素的值
- D ← W D + w t d t W + w t D \leftarrow \frac{WD+w_td_t}{W+w_t} D←W+wtWD+wtdt, W ← W + w t W \leftarrow W+w_t W←W+wt
例子:通过真实场景的3D符号距离函数的截面图

平面渲染方法
-
光线投射 Ray Casting (GPU渲染,快)
- 对于每个相机像素,拍摄一条射线并搜索零点交叉点
- 当相机像素远离物体表面时,SDF中的值可以沿射线跳过(只更新截断)。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-a865RjWQ-1627291912749)(https://raw.githubusercontent.com/Uzizkp/image-host/master/img/picgo/20210720214941.png)]
- 当新的数据到达时,根据以下原则更新每个体素的值
-
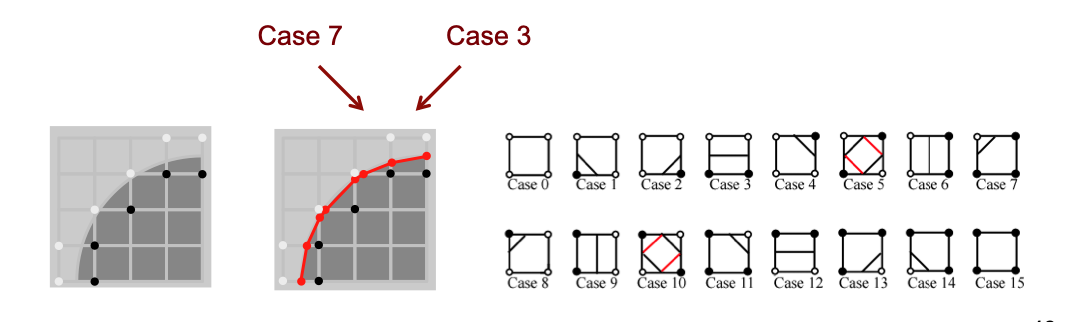
多边形化(CPU渲染,慢)
- 使用marching cubes算法来生成三角形网格Mesh extraction
- 需要处理整个网格
- 通过内插法找到符号距离函数
- 使用marching cubes算法来生成三角形网格Mesh extraction
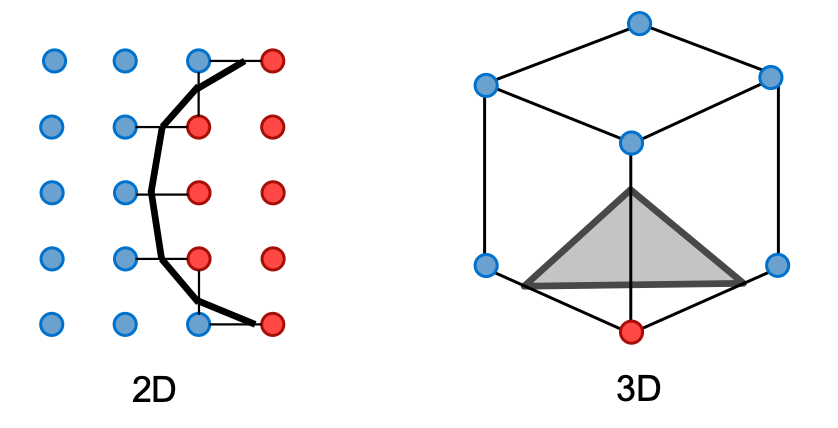
- 2D Marching square
- 分别评估每个单元
- 检查哪些顶点是内侧/外侧
- 根据16个查找表生成三角形
- 3D Marching cube
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ckQFKPov-1627291912768)(https://raw.githubusercontent.com/Uzizkp/image-host/master/img/picgo/20210720215844.png)]
http://users.polytech.unice.fr/~lingrand/MarchingCubes/algo.html
Pros VS Cons
- SDF的优点
- 可以构建整个3D模型
- 亚体素的精准度
- 支持实施GPU加速
- 缺点
- 体素网格空间消耗比较大
- 多边形化很慢
总结
- 存在大量3D环境表示法
- 要根据具体的应用场景选取建模方法
- 体素(Voxel)表示法可以构建起完整的3D场景
- 八叉树Octrees是紧凑的、具有多分辨率、概率性的三维表示法
- 表面模型支持可穿行性分析
- 符号距离函数也可以用来表示3D网格,但是仅支持表面亚体素级的精确度
参考
- Multi-Level Surface Maps for Outdoor Terrain Mapping and Loop Closing, R. Triebel, P. Pfaff, and W. Burgard, IEEE/RSJ Int. Conf. on Int. Robots and Systems (IROS), 2006
- OctoMap: An Efficient Probabilistic 3D Mapping Framework Based on Octrees, A. Hornung,. K.M. Wurm, M. Bennewitz, C. Stachniss, and W. Burgard, Autonomous Robots, 2013
- World Modeling, W. Burgard, M. Herbert, and M. Bennewitz. Handbook of Robotics (2nd edition), Chapter 45, Springer, 2016.
- Real-Time Camera Tracking and 3D Reconstruction Using Signe Distance Functions, E. Bylow, J. Sturm, C. Kerl, F. Kahl, and D. Cremers, Robotics: Science and Systems (RSS), 2013
- Continuous Humanoid Locomotion over Uneven Terrain using Stereo Fusion, M. F. Fallon, P. Marion, R. Deits, T. Whelan, M. Antone, J. McDonald, and R. Tedrake, Humanoids 2015















 9905
9905











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









