







前面内容:
一. 器件选型心得(系统设计)--1_goldqiu的博客-CSDN博客
一. 器件选型心得(系统设计)--2_goldqiu的博客-CSDN博客
三. 多传感器标定方案(空间同步)--1_goldqiu的博客-CSDN博客
五. 激光雷达建图和定位方案-基础概念
点与坐标系
定义世界坐标系w和机体坐标系b,那么坐标转换由旋转矩阵和平移矢量来描述:
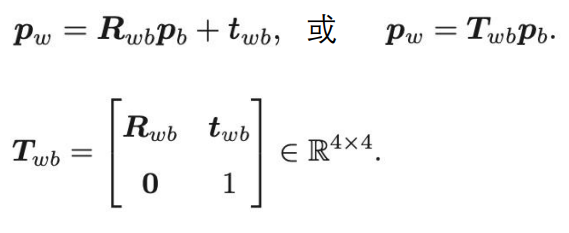
添加图片注释,不超过 140 字(可选)
李群和李代数
• 旋转矩阵称为SO3群,变换矩阵称为SE3群 • SO3群的李代数记为so3,实际上就是旋转矢量 • SO3到so3的映射称为指数和对数映射,实际即为旋转矢量到旋转矩阵的转换公式

添加图片注释,不超过 140 字(可选)
BCH公式给出了李群上(左右)乘小量和李代数上的关系:

添加图片注释,不超过 140 字(可选)
解释:
李群左乘小量(用左乘李代数小量指数变换到的李群来表示)等于李代数加上李代数小量左乘左雅可比矩阵,然后再加反对称符号,指数变换到李群。
李代数加小量(李代数直接加小量,然后加反对称符号,再指数变换到李群)等于原来的李群左乘一个新的李群,即李代数小量左乘左雅可比矩阵再取反对称符号,指数变换到李群;或右乘一个新的李群,即李代数小量右乘右雅可比矩阵再取反对称符号,指数变换到李群。
SO3的左右雅可比阵:
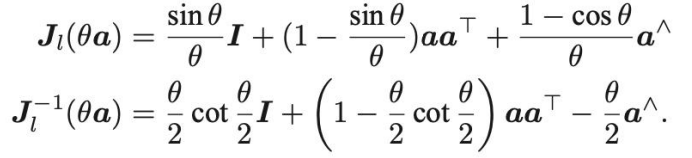
添加图片注释,不超过 140 字(可选)
左右之间的关系:
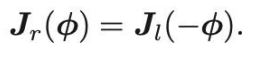
添加图片注释,不超过 140 字(可选)
运动学
首先R是正交阵
添加图片注释,不超过 140 字(可选)
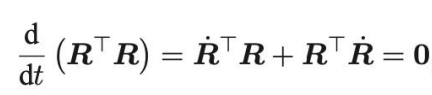
添加图片注释,不超过 140 字(可选)
于是:
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
是反对称矩阵。
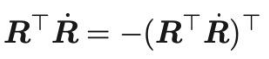
那么:

添加图片注释,不超过 140 字(可选)
称为泊松方程。
意义是对李群求导等于右乘或者左乘一个反对称矩阵。
如果仅考虑瞬时变化,在固定时间t,可以认为w不变 • 称为瞬时角速度 • 瞬时角速度同时也是旋转向量,模长代表旋转轴,长度代表旋转速度。
将泊松方程视为常微分方程,可得:

添加图片注释,不超过 140 字(可选)
意义为:t0时刻车辆的姿态为R(t0),经过∆t时间的角速度变换后,车辆的姿态为原来的姿态右乘一个李群,即对角速度乘∆t求指数变换。
于是,得到连续形式和离散形式上的运动学:
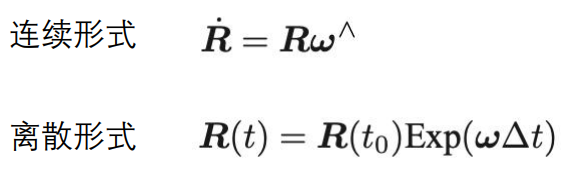
添加图片注释,不超过 140 字(可选)
这是处理IMU角速度的基础。
线速度与加速度
考虑带有旋转关系的两个坐标系,某个点p在两个坐标系下满足:
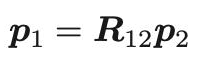
添加图片注释,不超过 140 字(可选)
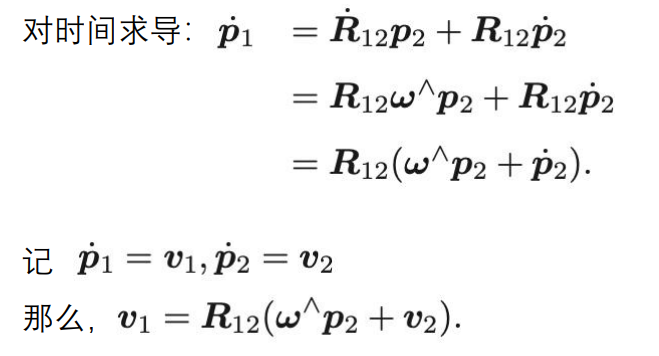
添加图片注释,不超过 140 字(可选)
该式为速度矢量的变换关系。
注意:
• 速度矢量的变换,并不是速度矢量的坐标转换;
• 由于p在运动,同时两个坐标系也在转动,所以p在两个坐标系中的速度本身就不一样;
• 该式描述了p在1系中的速度与2系中速度之间的转换关系,而不是某个固定的速度矢量在两个系中取坐标(这个有时候也会用)。
继续求时间导数:
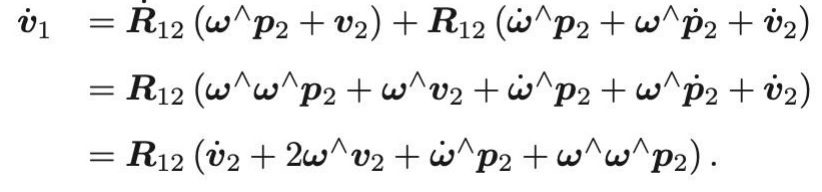
添加图片注释,不超过 140 字(可选)
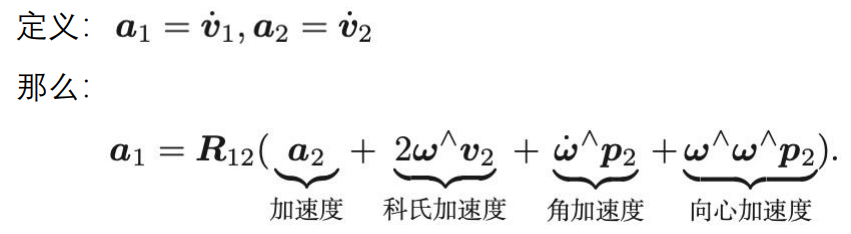
添加图片注释,不超过 140 字(可选)
同样,这是两个系中的加速度矢量变换,而非坐标变换!
实际例子:
车辆在世界系中运动,我们关心车辆的运动速度,请问应该如何表示?
• 车的运动速度是指车身坐标系原点在世界坐标系中的速度矢量,记作Vw ;
• 该点在车体系下一直为原点,速度为零,所以不谈论这个点的速度;
• 我们谈论Vw在车体系下的坐标表示,即:

添加图片注释,不超过 140 字(可选)
这是坐标变换,并非前文的矢量变换;
• 该速度可以通过轮子、电机等设备测量到。
SO3的求导
将李群和李代数引入SO3后,求导相关的操作变得十分简单,而且全部都可以写成矩阵式操作 算例(右扰动模型):
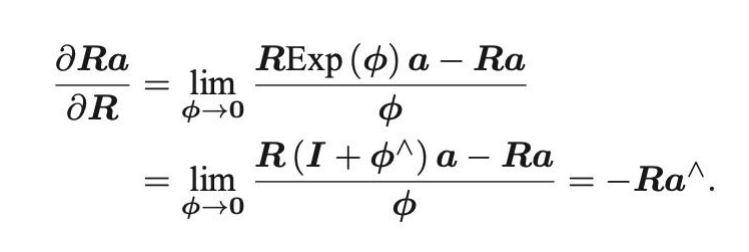
添加图片注释,不超过 140 字(可选)
李代数为小量。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









