






设
O,
A是高度
不同,且不在同一铅垂线上的两定点,
y
如果不计摩擦和空气阻力,一质点
m
在重力作用下从
O点沿一曲线降落至 。
A(
p,
q)
A点,问曲线呈何种形状时,质点降y
落的时间最短。
图 7-1 设曲线为
y =
y(
x) ,坐标如图 7
1,质点由
O点开始运动,它的速度
v与它的纵坐标有关系
式中,
g是重力加速度。
在曲线上点 (
x,
y) 处,质点的运动速度为
式中,
s表示曲线的弧长,
t表示时间,于是
由于点
O,
A的横坐标分别是 0,
p,则质点
m从
O点运动到
A点所需时间为
这样,质点由
O点运动到
A点所需时间
t是
y(
x)的函数,最速降线问题就是满足边界条件
y(0)= 0,
y(
p) =
q
的所有连续函数
y(
x)中,求出一个函数
y使泛函式(7.1.4)取最小值。
对泛函求极值的问题称为变分问题,使泛函取极值的函数称为变分问题的解,也称为极值函数。
在微分学中,求函数
y =
y(
x) 的极值是求自变量
x的值,当
x取这些值时,
y取极 大(小)值、取极值的必要条件是d
y/d
x= 0 。下面我们仿照函数微分的概念来定义泛函的变分概念,进而导出泛函极值存在的必要条件。设
y,
y0 是集合
C的元素,称δ
y =
y −
y0 为函数
y在
y0处的变分。
这里的δ
y是
x的函数,它与 ∆
y的区别在于:变分 δ
y反映的是整个函数的改变,
而 ∆
y表示的是同一个函数
y(
x)因
x的不同值而产生的差异。在本书,我们总是假定
y(
x)和
F(
x,
y,
y′) 都是充分光滑的,且
y(
x)在两个端点处固定,即
y(
a) =
y1,
y(
b) =
y2 (7.1.5)
式中,
y1,
y2是两个常数。
考虑泛函
上式可推出
上式称为
J (
y)的变分,记为δ
J (
y),即
(7.1.7)
下面我们证明,泛函
J (
y)取极值的必要条件是
δ
J(
y) = 0 (7.1.8)或者
(7.1.9)
设
y =
y(
x) 使泛函
J (
y)取极值,取函数
y(
x)变分的特殊形式为
δ
y(
x) = εϕ(
x)
式中, ε是任意小的实数;ϕ(
x)是充分光滑的任意函数,并且满足条件
ϕ(
a) = 0, ϕ(
b) = 0
这样,函数
y(
x) +εϕ(
x) 满足边界条件式(7.1.5)。因此,泛函
J[
y(
x) +εϕ(
x)]
当 ε= 0时取最小值
J[
y(
x)] ,从而有

由于
(7.1.10)
以 ε乘式(7.1.10),且 δ
y(
x) =εϕ(
x)
则有
应用分部积分,我们作进一步的分析,有
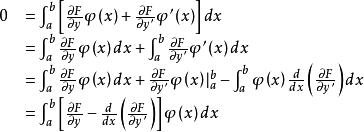
由ϕ(
x)的任意性,可得
(7.1.11)
式(7.1.11)称为欧拉-拉格朗日方程,简记为 E-L方程,
必要条件
y =
y(
x) 使泛函式(7.1.6)取极小值,则
y =
y(
x) 一定使欧拉-拉格朗日方程式(7.1.11)满足边界条件式(7.1.5)的解。
我们把满足 E-L方程边值问题的解称为驻留函数,对应的积分曲线称为驻留曲线。严格地讲,E-L方程边值问题的解满足变分问题的必要条件,因此它是否是极值函数,还需作进一步的判别。在实际问题中,极值的存在性通常给出问题时已经肯定了,这样,当一个实际现象已知其有唯一的极值存在,而这时也只得到一个驻留函数,则可以判定这个驻留函数就是极值函数。
最终解答
解
且y(0)=0,y(p)=q
这样
(7.1.12)
其E-L方程为
由于
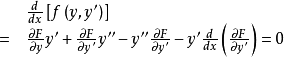
所以有
(7.1.13)
将(7.1.12)代入式(7.1.13)
(7.1.14)
引入变量代换x=x(θ),并设y'=cot(θ/2)
则由式(7.1.14)可得
上式对θ求导,得
所以


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









