







 本文探讨了最速降线问题,即在重力作用下,从一点A滑到另一点B的最短时间路径。通过对问题的重述、数学和物理建模,得出最速降线是滚轮线(旋轮线)的一部分。利用物理中的能量守恒和变分法,结合数学中的泛函极值原理,推导出满足条件的曲线方程。最后,揭示了一个有趣的巧合:当滚轮以特定角速度旋转时,滚轮上点的运动速度与沿最速降线运动的质点速度相同。
本文探讨了最速降线问题,即在重力作用下,从一点A滑到另一点B的最短时间路径。通过对问题的重述、数学和物理建模,得出最速降线是滚轮线(旋轮线)的一部分。利用物理中的能量守恒和变分法,结合数学中的泛函极值原理,推导出满足条件的曲线方程。最后,揭示了一个有趣的巧合:当滚轮以特定角速度旋转时,滚轮上点的运动速度与沿最速降线运动的质点速度相同。

Brachistochrone 来自于古希腊语:βράχιστος χρόνος (brakhistos, superlative of brakhus short + chronos time),意思是时间最短. Brachistochrone curve 指的就是"时间最短"的曲线.
关于最速降线问题的起源和发展参见:知乎贴,用一句话来概括就是:神仙打架!
为了您更好的阅读体验,请使用电脑浏览.
一、问题重述
一质量为
m
m
m 的质点,在重力作用下从定点
A
\small A
A 沿曲线下滑至定点
B
\small B
B,试确定一条曲线,使得质点由
A
\small A
A 下滑到
B
\small B
B 所需时间最短.
假定
B
\small B
B 比
A
\small A
A 低,重力加速度为常数
g
g
g,不计摩擦力和其他阻力等因素.

二、数学描述

建立坐标系,如图所示. 设曲线为
y
=
y
(
x
)
,
(
x
∈
[
0
,
c
]
)
\small y=y(x),(x\in[0,c])
y=y(x),(x∈[0,c]),满足
y
(
0
)
=
0
,
y
(
c
)
=
H
\small y(0)=0,y(c)=H
y(0)=0,y(c)=H,且足够光滑,并设这样的函数组成的全体为集合
C
\small C
C,我们的目标是求函数
y
y
y,使得
y
=
arg min
C
{
质点沿
y
=
y
(
x
)
由
A
到
B
的下滑时间
}
y=\argmin _C \{\,\textbf{质点沿}\,y=y(x)\, \textbf{由}\,A\,\textbf{到}\,B\,\textbf{的下滑时间}\,\}
y=Cargmin{质点沿y=y(x)由A到B的下滑时间}
三、物理建模

一言一蔽之,曰:分割-近似-取极限.
分割:
建立相同坐标系,设
A
(
0
,
0
)
,
B
(
c
,
H
)
\small A(0,0),B(c,H)
A(0,0),B(c,H),将带状区域
0
<
y
<
H
\small 0<y<H
0<y<H 用平行于
x
x
x 轴的直线
y
=
y
k
=
k
H
/
n
\small y=y_k=kH/n
y=yk=kH/n 分割成
n
n
n 个小带状区域.
近似:
在带状区域
y
k
−
1
<
y
<
y
k
y_{k-1}<y<y_k
yk−1<y<yk 内,可近似认为
v
k
=
2
g
y
k
v_k=\sqrt{2gy_k}
vk=2gyk (根据能量守恒定律可得)不变,近似认为曲线为直线.
分析:怎样的路线才是最快的?先来考虑下述问题.
设质点从 A 1 \small A_1 A1 经直线 l l l 到达 A 2 \small A_2 A2,质点在 l l l 上侧时速度为 v 1 v_1 v1,下侧时速度为 v 2 v_2 v2,请问质点应沿什么路线运动才最省时?
因为质点在直线两侧时速度不变,所以运动轨迹应是折线,折点在直线 l l l 上,问题转化为确定最佳折点的位置.
设 A 1 O ⊥ l , A 2 D ⊥ l , C \small A_1O\perp l,A_2D\perp l,C A1O⊥l,A2D⊥l,C 为折点,其余标注如图所示,只有 x x x 为变量.

则质点由 A 1 \small A_1 A1 到 A 2 \small A_2 A2 所需时间为 t = A 1 C v 1 + C A 2 v 2 = x 2 + a 2 v 1 + ( c − x ) 2 + b 2 v 2 t=\frac{A_1C}{v_1}+\frac{CA_2}{v_2}=\frac{\sqrt{x^2+a^2}}{v_1}+\frac{\sqrt{(c-x)^2+b^2}}{v_2} t=v1A1C+v2CA2=v1x2+a2+v2(c−x)2+b2对 x x x 求导 d t d x = 1 v 1 2 x x 2 + a 2 − 1 v 2 2 ( c − x ) ( c − x ) 2 + b 2 \frac{dt}{dx}=\frac{1}{v_1}\frac{2x}{\sqrt{x^2+a^2}}-\frac{1}{v_2}\frac{2(c-x)}{\sqrt{(c-x)^2+b^2}} dxdt=v11x2+a22x−v21(c−x)2+b22(c−x)唯一驻点满足 d t d x = 0 ⇒ 1 v 1 x x 2 + a 2 = 1 v 2 ( c − x ) ( c − x ) 2 + b 2 \frac{dt}{dx}=0\Rightarrow\frac{1}{v_1}\frac{x}{\sqrt{x^2+a^2}}=\frac{1}{v_2}\frac{(c-x)}{\sqrt{(c-x)^2+b^2}} dxdt=0⇒v11x2+a2x=v21(c−x)2+b2(c−x)即 sin α 1 v 1 = sin α 2 v 2 \frac{\sin\alpha_1}{v_1}=\frac{\sin\alpha_2}{v_2} v1sinα1=v2sinα2这就是光学中的 Snell \small \textrm{Snell} Snell 折射定律,即光沿"最短路径"传播.
回过头来继续看我们的问题

考虑质点经过第
k
k
k 层与第
k
+
1
k+1
k+1 层,根据近似,质点在每层中速度不变,由上述结论知,要使时间最短,
α
k
,
α
k
+
1
\alpha_{k},\alpha_{k+1}
αk,αk+1 应满足
sin
α
k
v
k
=
sin
α
k
+
1
v
k
+
1
\frac{\sin\alpha_k}{v_k}=\frac{\sin\alpha_{k+1}}{v_{k+1}}
vksinαk=vk+1sinαk+1对任意的
k
k
k 成立,则
sin
α
k
v
k
=
C
1
(
常数
)
\frac{\sin\alpha_k}{v_k}=C_1(\textbf{常数})
vksinαk=C1(常数)取极限:
令
n
→
∞
n\to\infin
n→∞,平行线间距趋于零,对于曲线上任意一点,都有
sin
α
v
=
C
1
(
常数
)
\frac{\sin\alpha}{v}=C_1(\textbf{常数})
vsinα=C1(常数)其中
α
\alpha
α 为该点切线与铅垂线夹角,如图所示.

∵
α
+
β
=
π
2
,
y
′
=
tan
β
∴
sin
α
=
cos
β
=
1
(
tan
β
)
2
+
1
=
1
(
y
′
)
2
+
1
\begin{aligned}&\because\alpha+\beta=\frac{\pi}{2},y'=\tan\beta\\&\therefore\sin\alpha=\cos\beta=\frac{1}{\sqrt{(\tan\beta)^2+1}}=\frac{1}{\sqrt{(y')^2+1}}\end{aligned}
∵α+β=2π,y′=tanβ∴sinα=cosβ=(tanβ)2+11=(y′)2+11再由
v
=
2
g
y
v=\sqrt{2gy}
v=2gy,得
sin
α
v
=
1
2
g
y
(
y
′
)
2
+
1
=
C
1
⇒
y
(
1
+
(
y
′
)
2
)
=
C
(
常数
)
\frac{\sin\alpha}{v}=\frac{1}{\sqrt{2gy}\sqrt{(y')^2+1}}=C_1\Rightarrow y(1+(y')^2)=C(\textbf{常数})
vsinα=2gy(y′)2+11=C1⇒y(1+(y′)2)=C(常数)
四、数学建模
上面算是用物理方法得到的结论,下面让我们看看复杂而严谨的数学方法,首先需要一些数学基础,鉴于我也没学过,就抄一下.
1. 数学基础
(1) 泛函
首先来介绍一种特殊的映射,泛函. 以前我们接触最多的映射是函数,即数集到数集的映射 f : R → R \small f:R\to R f:R→R. 所谓的泛函,指的是这样一种映射:
设 C \small C C 是一个函数集,对于 C \small C C 中任何一个元素 y ( x ) \small y(x) y(x),数集 B \small B B 中都有唯一的一个元素 J \small J J 与之对应,则称 J \small J J 为 y ( x ) \small y(x) y(x) 的泛函数,记作 J = J [ y ( x ) ] J=J[y(x)] J=J[y(x)] 泛函的值是数,自变量是函数,泛函是函数的推广. 特别地,我们这里考虑的集合 C \small C C 中的元素是这样的函数 y ( a ) = y 1 , y ( b ) = y 2 y(a)=y_1,y(b)=y_2 y(a)=y1,y(b)=y2其中 y 1 , y 2 y_1,y_2 y1,y2 为常数, y ( x ) \small y(x) y(x) 充分光滑.
几何上来看, C \small C C 中的元素均是由点 A ( a , y 1 ) \small A(a,y_1) A(a,y1) 到点 B ( b , y 2 ) B\small (b,y_2) B(b,y2) 的光滑曲线.
一般情况下,泛函可以用以下积分式来表示 J [ y ( x ) ] = ∫ a b F ( x , y , y ′ ) d x J[y(x)]=\int_{a}^{b}F(x,y,y')dx J[y(x)]=∫abF(x,y,y′)dx
(2) 泛函变分
函数 y = f ( x ) \small y=f(x) y=f(x) 的微分 d y dy dy 指的是由于自变量 x 0 → x 0 + d x x_0\to x_0+dx x0→x0+dx 所引起的因变量 y y y 的变化量的线性近似 d y = f ′ ( x 0 ) d x = d f d x ∣ x = x 0 d x dy=f'(x_0)dx=\frac{df}{dx}\Big|_{x=x_0}dx dy=f′(x0)dx=dxdf x=x0dx 而泛函 J [ y ( x ) ] \small J[y(x)] J[y(x)] 的变分 δ J \small \delta J δJ 指的是由于自变量 y → y + δ y y\to y+\delta y y→y+δy 所引起的因变量 J \small J J 的变化量的线性近似 δ J \small \delta J δJ.
下面仿照函数微分来定义泛函变分.
假定 y ( x ) ( ∈ C ) \small y(x)(\in C\,) y(x)(∈C) 和 F ( x , y , y ′ ) \small F(x,y,y') F(x,y,y′) 充分光滑,考虑泛函 J [ y ( x ) ] = ∫ a b F ( x , y , y ′ ) d x J[y(x)]=\int_{a}^{b}F(x,y,y')dx J[y(x)]=∫abF(x,y,y′)dx当 y y y 有微小变化 δ y \delta y δy ( δ y \delta y δy 也是 x x x 的函数) 时,函数 F \small F F 的改变量约等于微分,即 Δ F = F ( x , y + δ y , y ′ + δ y ′ ) − F ( x , y , y ′ ) ≈ ∂ F ∂ y δ y + ∂ F ∂ y ′ δ y ′ = d F \Delta F=F(x,y+\delta y,y'+\delta y')-F(x,y,y')\approx \frac{\partial F}{\partial y}\delta y+\frac{\partial F}{\partial y'}\delta y'=dF ΔF=F(x,y+δy,y′+δy′)−F(x,y,y′)≈∂y∂Fδy+∂y′∂Fδy′=dF则其泛函的改变量约等于变分 δ J \small \delta J δJ Δ J = J [ y ( x ) + δ y ( x ) ] − J [ y ( x ) ] = ∫ a b [ F ( x , y + δ y , y ′ + δ y ′ ) − F ( x , y , y ′ ) ] d x ≈ ∫ a b ( ∂ F ∂ y δ y + ∂ F ∂ y ′ δ y ′ ) d x = δ J \begin{aligned}\Delta J&=J[y(x)+\delta y(x)]-J[y(x)]\\&=\int_{a}^{b}[F(x,y+\delta y,y'+\delta y')-F(x,y,y')]dx\\&\approx \int_{a}^{b}\Big(\frac{\partial F}{\partial y}\delta y+\frac{\partial F}{\partial y'}\delta y'\Big)dx\\&=\delta J \end{aligned} ΔJ=J[y(x)+δy(x)]−J[y(x)]=∫ab[F(x,y+δy,y′+δy′)−F(x,y,y′)]dx≈∫ab(∂y∂Fδy+∂y′∂Fδy′)dx=δJ
(3) 泛函极值
在一元函数
y
=
y
(
x
)
y=y(x)
y=y(x) 中,
y
y
y 在
x
=
x
0
x=x_0
x=x0 处取极值的必要条件是
d
y
d
x
∣
x
=
x
0
=
0
\frac{dy}{dx}\Big|_{x=x_0}=0
dxdy
x=x0=0下面证明泛函
J
\small J
J 取极值的必要条件是
δ
J
=
0
\delta J=0
δJ=0或者
∂
F
∂
y
−
d
d
x
(
∂
F
∂
y
′
)
=
0
\frac{\partial F}{\partial y}-\frac{d}{dx}\Big(\frac{\partial F}{\partial y'}\Big)=0
∂y∂F−dxd(∂y′∂F)=0
设泛函
J
\small J
J 在
y
=
y
(
x
)
y=y(x)
y=y(x) 处取极值,取
δ
y
\delta y
δy 的特殊形式:
δ
y
=
ϵ
φ
(
x
)
\delta y=\epsilon \varphi(x)
δy=ϵφ(x)其中
ϵ
\epsilon
ϵ 为任意小的实数,
φ
(
x
)
\varphi(x)
φ(x) 为充分光滑的任意函数,且满足
φ
(
a
)
=
φ
(
b
)
=
0
\varphi(a)=\varphi(b)=0
φ(a)=φ(b)=0则函数
y
+
δ
y
∈
C
\small y+\delta y\in C
y+δy∈C. 令
G
(
ϵ
)
=
J
[
y
(
x
)
+
ϵ
φ
(
x
)
]
=
J
[
y
(
x
)
]
+
δ
J
=
J
[
y
(
x
)
]
+
ϵ
∫
a
b
(
∂
F
∂
y
φ
(
x
)
+
∂
F
∂
y
′
φ
′
(
x
)
)
d
x
\begin{aligned}G(\epsilon)&=J[y(x)+\epsilon \varphi(x)]\\&=J[y(x)]+\delta J\\&=J[y(x)]+\epsilon\int_{a}^{b}\Big(\frac{\partial F}{\partial y}\varphi(x)+\frac{\partial F}{\partial y'} \varphi'(x)\Big)dx\end{aligned}
G(ϵ)=J[y(x)+ϵφ(x)]=J[y(x)]+δJ=J[y(x)]+ϵ∫ab(∂y∂Fφ(x)+∂y′∂Fφ′(x))dx(上式中第二个等号应该是约等号,但因为
ϵ
\epsilon
ϵ 是任意小的实数,同时为了证明能够顺利进行,暂且允许这么一点瑕疵)
由
J
\small J
J 在
y
=
y
(
x
)
y=y(x)
y=y(x) 处取极值可知,
G
(
ϵ
)
\small G(\epsilon)
G(ϵ) 在
ϵ
=
0
\epsilon=0
ϵ=0 处取极值,则有
d
G
d
ϵ
∣
ϵ
=
0
=
∫
a
b
(
∂
F
∂
y
φ
(
x
)
+
∂
F
∂
y
′
φ
′
(
x
)
)
d
x
=
0
\frac{dG}{d\epsilon}\Big|_{\epsilon=0}=\int_{a}^{b}\Big(\frac{\partial F}{\partial y}\varphi(x)+\frac{\partial F}{\partial y'} \varphi'(x)\Big)dx=0
dϵdG
ϵ=0=∫ab(∂y∂Fφ(x)+∂y′∂Fφ′(x))dx=0两端同乘
ϵ
\epsilon
ϵ,则有
δ
J
=
∫
a
b
(
∂
F
∂
y
ϵ
φ
(
x
)
+
∂
F
∂
y
′
ϵ
φ
′
(
x
)
)
d
x
=
0
\delta J=\int_{a}^{b}\Big(\frac{\partial F}{\partial y}\epsilon\varphi(x)+\frac{\partial F}{\partial y'}\epsilon\varphi'(x)\Big)dx=0
δJ=∫ab(∂y∂Fϵφ(x)+∂y′∂Fϵφ′(x))dx=0 下证第二个必要条件:
∂
F
∂
y
−
d
d
x
(
∂
F
∂
y
′
)
=
0
\frac{\partial F}{\partial y}-\frac{d}{dx}\Big(\frac{\partial F}{\partial y'}\Big)=0
∂y∂F−dxd(∂y′∂F)=0
0
=
∫
a
b
(
∂
F
∂
y
φ
(
x
)
+
∂
F
∂
y
′
φ
′
(
x
)
)
d
x
=
∫
a
b
∂
F
∂
y
φ
(
x
)
d
x
+
∫
a
b
∂
F
∂
y
′
d
(
φ
(
x
)
)
(应用分部积分)
=
∫
a
b
∂
F
∂
y
φ
(
x
)
d
x
+
∂
F
∂
y
′
φ
(
x
)
∣
a
b
−
∫
a
b
φ
(
x
)
d
d
x
(
∂
F
∂
y
′
)
d
x
(
φ
(
a
)
=
φ
(
b
)
=
0
)
=
∫
a
b
[
∂
F
∂
y
−
d
d
x
(
∂
F
∂
y
′
)
]
φ
(
x
)
d
x
\begin{aligned}0&=\int_{a}^{b}\Big(\frac{\partial F}{\partial y}\varphi(x)+\frac{\partial F}{\partial y'} \varphi'(x)\Big)dx\\&=\int_{a}^{b}\frac{\partial F}{\partial y}\varphi(x)dx+\int_{a}^{b}\frac{\partial F}{\partial y'} d(\varphi(x)) \quad\textbf{(应用分部积分)}\\&=\int_{a}^{b}\frac{\partial F}{\partial y}\varphi(x)dx+\frac{\partial F}{\partial y'} \varphi(x)\Big|_a^b-\int_{a}^{b}\varphi(x)\frac{d}{dx}\Big(\frac{\partial F}{\partial y'}\Big)dx\quad (\varphi(a)=\varphi(b)=0)\\&= \int_{a}^{b}\bigg[\frac{\partial F}{\partial y}-\frac{d}{dx}\Big(\frac{\partial F}{\partial y'}\Big)\bigg]\varphi(x)dx\end{aligned}
0=∫ab(∂y∂Fφ(x)+∂y′∂Fφ′(x))dx=∫ab∂y∂Fφ(x)dx+∫ab∂y′∂Fd(φ(x))(应用分部积分)=∫ab∂y∂Fφ(x)dx+∂y′∂Fφ(x)
ab−∫abφ(x)dxd(∂y′∂F)dx(φ(a)=φ(b)=0)=∫ab[∂y∂F−dxd(∂y′∂F)]φ(x)dx
这里需要介绍一个引理:
设 E = { g ∣ g ( a ) = g ( b ) = 0 , g ∈ C 1 [ a , b ] } \small E=\{g\,|\,g(a)=g(b)=0\,,\,g\in C^1[a,b]\} E={g∣g(a)=g(b)=0,g∈C1[a,b]},即由在 [ a , b ] \small [a,b] [a,b] 上连续且端点函数值为零的函数组成的集合,若 [ a , b ] \small [a,b] [a,b] 上的连续函数 f f f 满足:
∀ g ∈ E \forall\, g\in E ∀g∈E,都有 ∫ a b f ( x ) g ( x ) d x = 0 \int_a^bf(x)g(x)dx=0 ∫abf(x)g(x)dx=0则 f ( x ) ≡ 0 f(x)\equiv 0 f(x)≡0.
套用该引理,由 φ ( x ) \varphi(x) φ(x) 的任意性,可得 ∂ F ∂ y − d d x ( ∂ F ∂ y ′ ) = 0 \frac{\partial F}{\partial y}-\frac{d}{dx}\Big(\frac{\partial F}{\partial y'}\Big)=0 ∂y∂F−dxd(∂y′∂F)=0这个式子被称为欧拉—拉格朗日方程,简记为 E \textrm{E} E- L \textrm{L} L 方程.
至此,泛函取极值的两个必要条件证毕!
2. 数学分析
下面对最速降线问题重新进行数学上的分析.
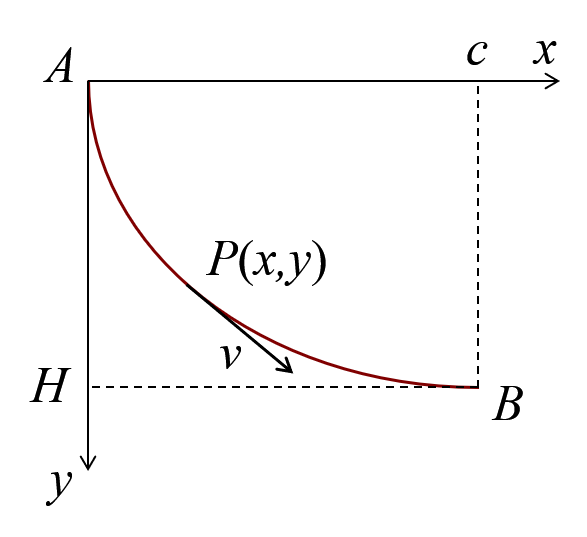
设质点经过曲线上点 P ( x , y ) \small P(x,y) P(x,y) 时速度为 v v v,由能量守恒定律 m g y = 1 2 m v 2 mgy=\frac{1}{2}mv^2 mgy=21mv2解得 v = 2 g y v=\sqrt{2gy} v=2gy. 弧微分 d s = 1 + ( y ′ ) 2 d x ds=\sqrt{1+(y')^2}\,dx ds=1+(y′)2dx,经过这一小段弧时近似认为速度不变,则所需时间为 d t = d s v = 1 + ( y ′ ) 2 2 g y d x dt=\frac{ds}{v}=\frac{\sqrt{1+(y')^2}}{\sqrt{2gy}}dx dt=vds=2gy1+(y′)2dx从 A A A 下滑到 B B B 所需总时间 T = ∫ d t = ∫ 0 c 1 + ( y ′ ) 2 2 g y d x = 1 2 g ∫ 0 c 1 + ( y ′ ) 2 y d x T=\int dt=\int_0^c\frac{\sqrt{1+(y')^2}}{\sqrt{2gy}}dx=\frac{1}{\sqrt{2g}}\int_0^c\frac{\sqrt{1+(y')^2}}{\sqrt{y}}dx T=∫dt=∫0c2gy1+(y′)2dx=2g1∫0cy1+(y′)2dx令 J [ y ( x ) ] = ∫ 0 c 1 + ( y ′ ) 2 y d x J[y(x)]=\int_0^c\frac{\sqrt{1+(y')^2}}{\sqrt{y}}dx J[y(x)]=∫0cy1+(y′)2dx则 J \small J J 是 y ( x ) y(x) y(x) 的泛函,被积函数为 F ( y , y ′ ) \small F(y,y') F(y,y′) 的形式,显然也是 F ( x , y , y ′ ) \small F(x,y,y') F(x,y,y′) 的形式.
我们的目标是求
y
=
arg min
C
T
=
arg min
C
J
[
y
(
x
)
]
y=\argmin_C \,T=\argmin_C \,J[y(x)]
y=CargminT=CargminJ[y(x)]则
J
[
y
(
x
)
]
\small J[y(x)]
J[y(x)] 在
y
y
y 处取极值,由第二必要条件(
E
\,\textrm{E}
E-
L
\textrm{L}
L 方程):
∂
F
∂
y
−
d
d
x
(
∂
F
∂
y
′
)
=
0
\frac{\partial F}{\partial y}-\frac{d}{dx}\Big(\frac{\partial F}{\partial y'}\Big)=0
∂y∂F−dxd(∂y′∂F)=0于是
d
d
x
(
F
(
y
,
y
′
)
−
y
′
∂
F
∂
y
′
)
=
∂
F
∂
y
y
′
+
∂
F
∂
y
′
y
′
′
−
(
y
′
′
∂
F
∂
y
′
+
y
′
d
d
x
(
∂
F
∂
y
′
)
)
=
y
′
(
∂
F
∂
y
−
d
d
x
(
∂
F
∂
y
′
)
)
=
0
\begin{aligned}\frac{d}{dx}\Big(F(y,y')−y'\frac{\partial F}{\partial y'}\Big)&=\frac{\partial F}{\partial y}y'+\frac{\partial F}{\partial y'}y''-\Big(y''\frac{\partial F}{\partial y'}+y' \frac{d}{dx}\Big(\frac{\partial F}{\partial y'}\Big)\Big)\\&=y'\Big(\frac{\partial F}{\partial y}-\frac{d}{dx}\Big(\frac{\partial F}{\partial y'}\Big)\Big)\\&=0\end{aligned}
dxd(F(y,y′)−y′∂y′∂F)=∂y∂Fy′+∂y′∂Fy′′−(y′′∂y′∂F+y′dxd(∂y′∂F))=y′(∂y∂F−dxd(∂y′∂F))=0则
F
(
y
,
y
′
)
−
y
′
∂
F
∂
y
′
=
C
1
(
常数
)
F(y,y')−y'\frac{\partial F}{\partial y'}= C_1(\textbf{常数})
F(y,y′)−y′∂y′∂F=C1(常数)将
F
(
y
,
y
′
)
=
1
+
(
y
′
)
2
y
,
∂
F
∂
y
′
=
1
y
y
′
1
+
(
y
′
)
2
F(y,y')=\frac{\sqrt{1+(y')^2}}{\sqrt{y}},\,\,\frac{\partial F}{\partial y'}=\frac{1}{\sqrt{y}}\frac{y'}{\sqrt{1+(y')^2}}
F(y,y′)=y1+(y′)2,∂y′∂F=y11+(y′)2y′ 代入,得
1
+
(
y
′
)
2
y
−
y
′
y
′
y
1
+
(
y
′
)
2
=
1
y
1
+
(
y
′
)
2
=
C
1
(
常数
)
\frac{\sqrt{1+(y')^2}}{\sqrt{y}}-y'\frac{y'}{\sqrt{y}\sqrt{1+(y')^2}}=\frac{1}{\sqrt{y}\,\sqrt{1+(y')^2}}= C_1(\textbf{常数})
y1+(y′)2−y′y1+(y′)2y′=y1+(y′)21=C1(常数)两边平方,则
y
(
1
+
(
y
′
)
2
)
=
C
(
常数
)
y(1+(y')^2)= C(\textbf{常数})
y(1+(y′)2)=C(常数)
五、曲线求解
通过两种方法得到的结果相同,即最速曲线应满足 y ( 1 + ( y ′ ) 2 ) = C ( 常数 ) y(1+(y')^2)=C(\textbf{常数}) y(1+(y′)2)=C(常数)下面进行求解.
根据上图 y ′ = tan β = cot α y'=\tan\beta=\cot\alpha y′=tanβ=cotα,因为质点一直向下滑(如果向上,肯定不是最优曲线),所以 0 ≤ α ≤ π / 2 0\leq\alpha\leq\pi/2 0≤α≤π/2.
令 2 R = C 2R=C 2R=C,令 y ′ = d y / d x = cot ( θ / 2 ) \displaystyle y'=dy/dx=\cot(\theta/2) y′=dy/dx=cot(θ/2),则 θ = 2 α \theta=2\alpha θ=2α,所以 0 ≤ θ ≤ π 0\leq\theta\leq\pi 0≤θ≤π.
设 x x x 是 θ \theta θ 的函数,即 x = x ( θ ) x=x(\theta) x=x(θ),我们的目标是求 x ( θ ) x(\theta) x(θ).
由 1 + cot 2 θ 2 = 1 + cos 2 θ 2 sin 2 θ 2 = sin 2 θ 2 + cos 2 θ 2 sin 2 θ 2 = 1 sin 2 θ 2 = 2 1 − cos θ 1+\cot^2\frac{\theta}{2}=1+\frac{\cos^2\displaystyle\frac{\theta}{2}}{\sin^2\displaystyle\frac{\theta}{2}}=\frac{\sin^2\displaystyle\frac{\theta}{2}+\cos^2\displaystyle\frac{\theta}{2}}{\sin^2\displaystyle\frac{\theta}{2}}=\frac{1}{\sin^2\displaystyle\frac{\theta}{2}}=\frac{2}{1-\cos\theta} 1+cot22θ=1+sin22θcos22θ=sin22θsin22θ+cos22θ=sin22θ1=1−cosθ2所以 y ( 1 + ( y ′ ) 2 ) = y ( 1 + cot 2 θ 2 ) = 2 y 1 − cos θ = 2 R ⇒ y = R ( 1 − cos θ ) y(1+(y')^2)=y(1+\cot^2\frac{\theta}{2})=\frac{2y}{1-\cos\theta}=2R\Rightarrow y=R(1-\cos\theta) y(1+(y′)2)=y(1+cot22θ)=1−cosθ2y=2R⇒y=R(1−cosθ)由 d y d x = cot θ 2 = cos θ 2 sin θ 2 , d y d θ = R sin θ = 2 R sin θ 2 cos θ 2 \frac{dy}{dx}=\cot\frac{\theta}{2}=\frac{\cos\displaystyle\frac{\theta}{2}}{\sin\displaystyle\frac{\theta}{2}},\,\,\frac{dy}{d\theta}=R\sin\theta=2R\sin\frac{\theta}{2}\cos\frac{\theta}{2} dxdy=cot2θ=sin2θcos2θ,dθdy=Rsinθ=2Rsin2θcos2θ则 x ′ ( θ ) = d x d θ = d y d θ / d y d x = 2 R sin θ 2 cos θ 2 sin θ 2 cos θ 2 = 2 R sin 2 θ 2 = R ( 1 − cos θ ) x'(\theta)=\frac{dx}{d\theta}=\frac{dy}{d\theta}/\frac{dy}{dx}=2R\sin\frac{\theta}{2}\cos\frac{\theta}{2}\frac{\sin\displaystyle\frac{\theta}{2}}{\cos\displaystyle\frac{\theta}{2}}=2R\sin^2\frac{\theta}{2}=R(1-\cos\theta) x′(θ)=dθdx=dθdy/dxdy=2Rsin2θcos2θcos2θsin2θ=2Rsin22θ=R(1−cosθ)所以 x ( θ ) = ∫ x ′ ( θ ) d θ = ∫ R ( 1 − cos θ ) d θ = R ( θ − sin θ ) + C 1 x(\theta)=\int x'(\theta)d\theta=\int R(1-\cos\theta)d\theta=R(\theta-\sin\theta)+C_1 x(θ)=∫x′(θ)dθ=∫R(1−cosθ)dθ=R(θ−sinθ)+C1
得到 x , y x,y x,y 关于 θ \theta θ 的参数方程 { x ( θ ) = R ( θ − sin θ ) + C 1 y ( θ ) = R ( 1 − cos θ ) , 0 ≤ θ ≤ π \begin{cases}x(\theta)=R(\theta-\sin\theta)+C_1\\y(\theta)=R(1-\cos\theta)\end{cases},\,0\leq\theta\leq\pi {x(θ)=R(θ−sinθ)+C1y(θ)=R(1−cosθ),0≤θ≤π还有两个待定系数 R , C 1 \small R,C_1 R,C1,别忘了我们还有两个边界条件没用呢,即 y ( 0 ) = 0 , y ( c ) = H y(0)=0,\,y(c)=H y(0)=0,y(c)=H先消去参数 θ \theta θ,作变量代换 θ = arccos ( 1 − y R ) , 0 ≤ θ ≤ π \theta=\arccos(1-\frac{y}{R}),\,0\leq\theta\leq\pi θ=arccos(1−Ry),0≤θ≤π则 x = R arccos ( 1 − y R ) − R 2 y R − y 2 R 2 + C 1 = R arccos ( 1 − y R ) − y ( 2 R − y ) + C 1 \begin{aligned}x&=R\arccos(1-\frac{y}{R})-R\sqrt{2\frac{y}{R}-\frac{y^2}{R^2}}+C_1\\&=R\arccos(1-\frac{y}{R})-\sqrt{y(2R-y)}+C_1\end{aligned} x=Rarccos(1−Ry)−R2Ry−R2y2+C1=Rarccos(1−Ry)−y(2R−y)+C1将边界条件换种描述方式,即 x ( 0 ) = 0 , x ( H ) = c x(0)=0,x(H)=c x(0)=0,x(H)=c将其代入方程,得 x ( 0 ) = R arccos ( 1 ) + C 1 = C 1 = 0 x ( H ) = R arccos ( 1 − H R ) − H ( 2 R − H ) + 0 = c \begin{aligned}x(0)&=R\arccos(1)+C_1=C_1=0\\x(H)&=R\arccos(1-\frac{H}{R})-\sqrt{H(2R-H)}+0=c\end{aligned} x(0)x(H)=Rarccos(1)+C1=C1=0=Rarccos(1−RH)−H(2R−H)+0=c则 C 1 = 0 , R \small C_1=0,R C1=0,R 的值可以由 H , c \small H,c H,c 确定. 参数方程变为 { x ( θ ) = R ( θ − sin θ ) y ( θ ) = R ( 1 − cos θ ) , 0 ≤ θ ≤ π \begin{cases}x(\theta)=R(\theta-\sin\theta)\\y(\theta)=R(1-\cos\theta)\end{cases},\,0\leq\theta\leq\pi {x(θ)=R(θ−sinθ)y(θ)=R(1−cosθ),0≤θ≤π其实 θ \theta θ 的值只有在 c / H = π / 2 \small c/H=\pi/2 c/H=π/2 时才能取到 π \pi π (看完下一部分你便知晓原因了),其余情况下 θ < π \theta<\pi θ<π.
可能有些读者已经看出来了,上述参数方程正是滚轮线(也叫摆线),参数
R
\small R
R 表示滚轮半径. 所以最速降线是滚轮线的一部分.
六、结果解释
滚轮线的参数方程推导过程如下:
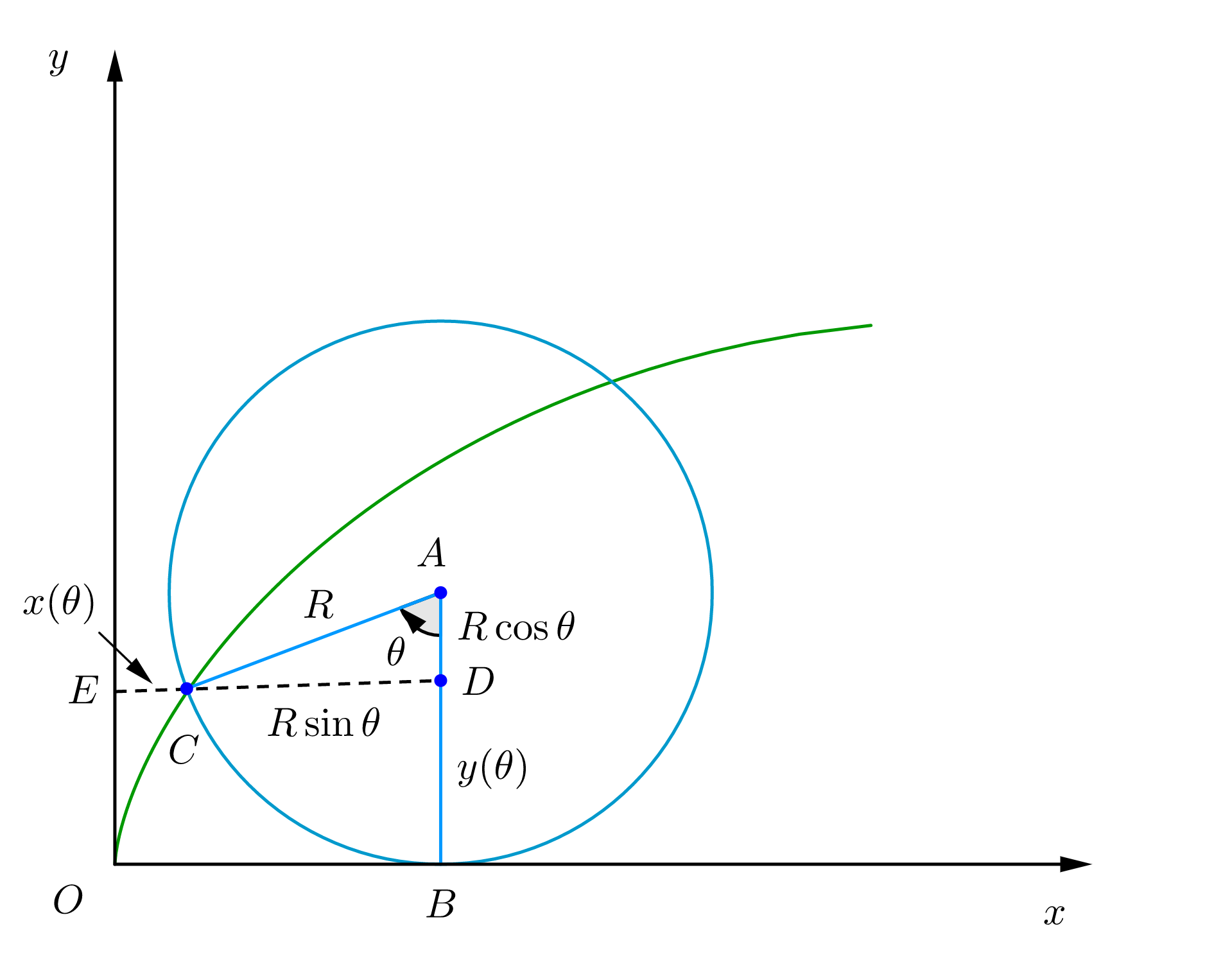
由于轨迹是无摩擦匀速滚动产生的,所以轮与地面接触点 B \small B B 的速度始终为 0 \small 0 0, B B B 点为瞬时旋转中心.
设转过的角度为 θ \theta θ,角速度为 w w w,则圆心 A \small A A 的速度 v = w R v=wR v=wR,移动的距离 E A = v t = R w t = R θ \small EA=vt=Rwt=R\theta EA=vt=Rwt=Rθ. 设点 C \small C C 坐标 ( x ( θ ) , y ( θ ) ) \small (x(\theta),y(\theta)) (x(θ),y(θ)),则 E C = x ( θ ) , B D = y ( θ ) \small EC=x(\theta),BD=y(\theta) EC=x(θ),BD=y(θ).
E A = E C + C A ⇒ R θ = x ( θ ) + R sin θ B A = B D + D A ⇒ R = y ( θ ) + R cos θ \begin{aligned}EA=EC+CA&\Rightarrow R\theta=x(\theta)+R\sin\theta \\ BA=BD+DA&\Rightarrow R=y(\theta)+R\cos\theta\end{aligned} EA=EC+CABA=BD+DA⇒Rθ=x(θ)+Rsinθ⇒R=y(θ)+Rcosθ所以滚轮线的参数方程为 { x ( θ ) = R ( θ − sin θ ) y ( θ ) = R ( 1 − cos θ ) , 0 ≤ θ ≤ 2 π \begin{cases}x(\theta)=R(\theta-\sin\theta)\\y(\theta)=R(1-\cos\theta)\end{cases},\,0\leq\theta\leq2\pi {x(θ)=R(θ−sinθ)y(θ)=R(1−cosθ),0≤θ≤2π参数 θ \theta θ 表示转过的角度.
下面来验证滚轮线就是最速降线,根据物理建模的结论(即下面这个图,其中 α \alpha α 为该点切线与铅垂线夹角):
最速降线需满足
sin
α
v
=
C
(
常数
)
\frac{\sin\alpha}{v}=C(常数)
vsinα=C(常数) 由
v
=
2
g
y
v=\sqrt{2gy}
v=2gy,得
sin
α
y
=
C
(
常数
)
⇒
sin
2
α
y
=
C
(
常数
)
\frac{\sin\alpha}{\sqrt{y}}=C(常数)\Rightarrow\frac{\sin^2\alpha}{y}=C(常数)
ysinα=C(常数)⇒ysin2α=C(常数)
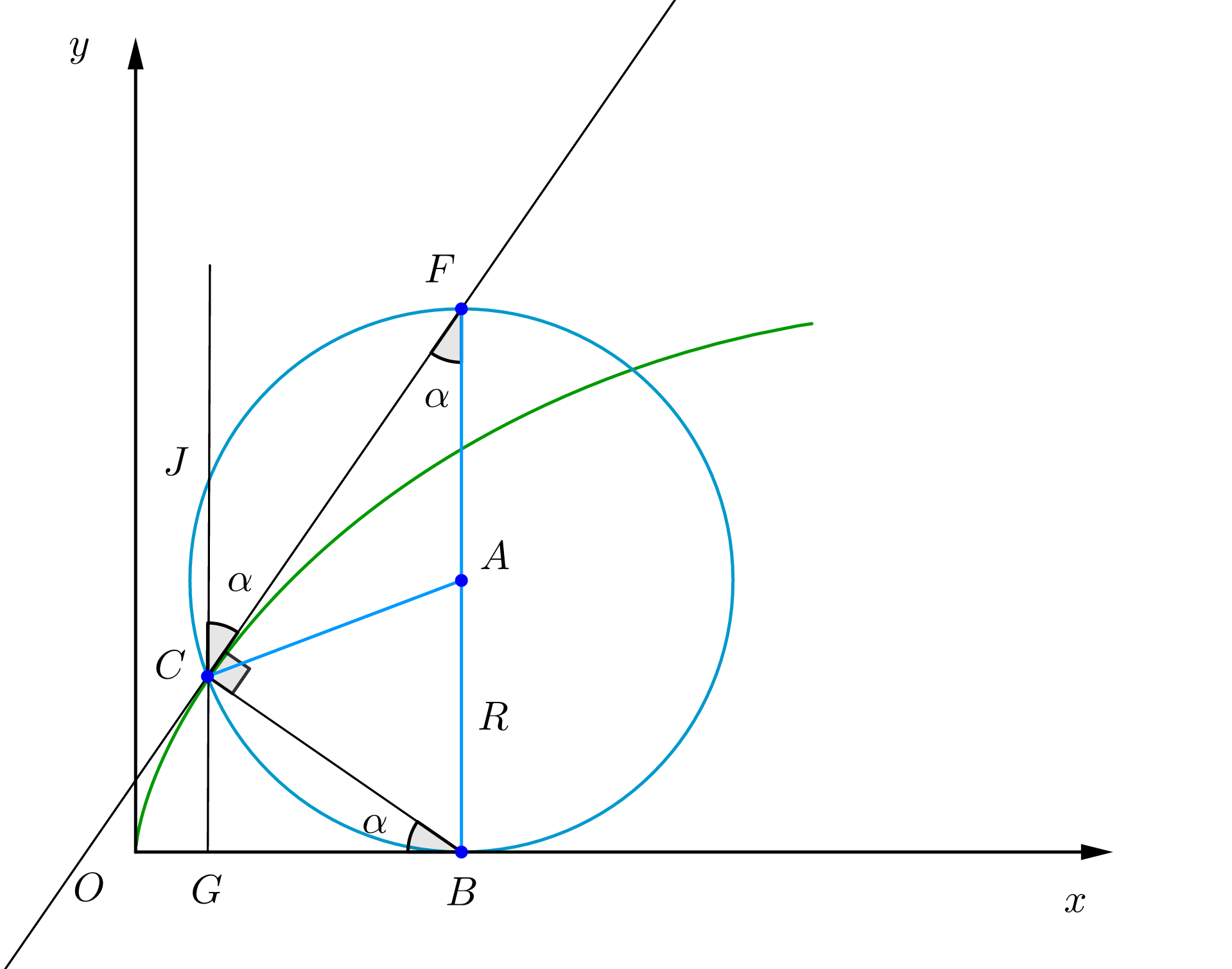
对滚轮线的图作些变动
因为
B
F
\small BF
BF 为直径,所以
B
C
⊥
C
F
\small BC\perp CF
BC⊥CF.
由
B
\small B
B 点瞬时速度为
0
\small 0
0,所以
C
\small C
C 点的速度方向与
B
C
\small BC
BC 垂直.
即
C
F
→
\small \overrightarrow{CF}
CF 为速度方向,直线
C
F
\small CF
CF 为滚轮线的切线.
则两张图中的
α
\alpha
α 是一致的.
因为
C
G
/
/
B
F
\small CG//BF
CG//BF,所以
∠
A
F
C
=
∠
F
C
G
=
α
\small \angle AFC=\angle FCG=\alpha
∠AFC=∠FCG=α.
由弦切角定理,
∠
G
B
C
=
∠
A
F
C
=
α
\small \angle GBC=\angle AFC=\alpha
∠GBC=∠AFC=α. 所以
y
=
C
G
=
B
C
sin
α
=
B
F
sin
α
sin
α
=
B
F
sin
2
α
=
2
R
sin
2
α
y=CG=BC\sin\alpha=BF\sin\alpha\sin\alpha=BF\sin^2\alpha=2R\sin^2\alpha
y=CG=BCsinα=BFsinαsinα=BFsin2α=2Rsin2α所以
sin
2
α
y
=
1
2
R
(
常数
)
\frac{\sin^2\alpha}{y}=\frac{1}{2R}(\textbf{常数})
ysin2α=2R1(常数)验证完毕.
最速降线是滚轮线这一巧合已经足以让人称奇,下面来看一件更加巧合的事情.
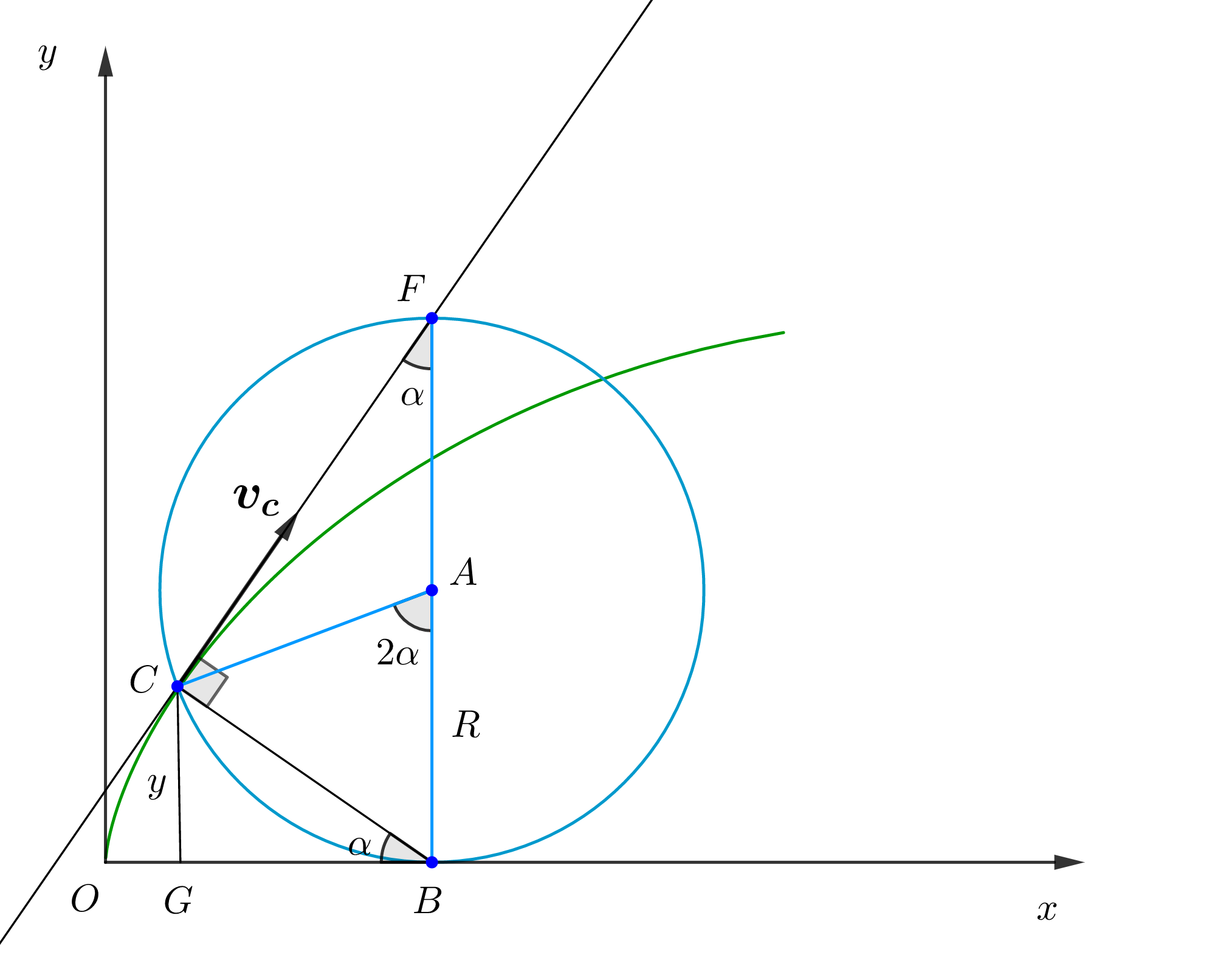
考虑轮子上点 C \small C C 的速度,设此时 C \small C C 的纵坐标也是 y y y,对应角度为 α \alpha α, 根据上述过程,有 y = 2 R sin 2 α \small y=2R\sin^2\alpha y=2Rsin2α. 因为点 B \small B B 是瞬时旋转中心,所以 C \small C C 的速度 v c = w ⋅ B C = w ⋅ 2 R sin α \small v_c=w\cdot BC=w\cdot 2R\sin\alpha vc=w⋅BC=w⋅2Rsinα.
我们已经知道,如果质点沿最速降线下滑,则其在 ( x , y ) \small (x,y) (x,y) 处的速度为 v = 2 g y v=\sqrt{2gy} v=2gy. 将 y = 2 R sin 2 α \small y=2R\sin^2\alpha y=2Rsin2α 代入,得 v = 2 g ⋅ 2 R sin 2 α = 2 g R sin α \small v=\sqrt{2g\cdot 2R\sin^2\alpha}=2\sqrt{gR}\sin\alpha v=2g⋅2Rsin2α=2gRsinα.
对比这两个式子 v c = w ⋅ 2 R sin α v_c=w\cdot 2R\sin\alpha vc=w⋅2Rsinα v = 2 g R sin α v=2\sqrt{gR}\sin\alpha v=2gRsinα若 w = g R \displaystyle w=\sqrt{\frac{g}{R}} w=Rg,则 v = v c v=v_c v=vc. 这说明了什么?我想大家应该已经清楚了. 即若轮子旋转的角速度与半径之间满足 w = g / R \small w=\sqrt{g/R} w=g/R,不仅得到的曲线是最速降线,且轮上点的运动速度与沿这条曲线运动(可能是下滑也可能是上滑)的质点的速度相同, How amazing it is! \textrm{How amazing it is!} How amazing it is!
七、补充资料
B站视频:最速降线问题——最快下滑路径为什么是旋轮线?(中英字幕)
维基百科:
1. Brachistochrone_curve(最速降线) (里面有"神仙"们的解法)
2. 旋轮线 (里面有其他有趣的性质)
参考文献:
1.于涛.数学物理方程与特殊函数[M].北京:科学出版社,2008.
Plus: 如有错误、可以改进的地方、或任何想说的,请在评论区留言!

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









