







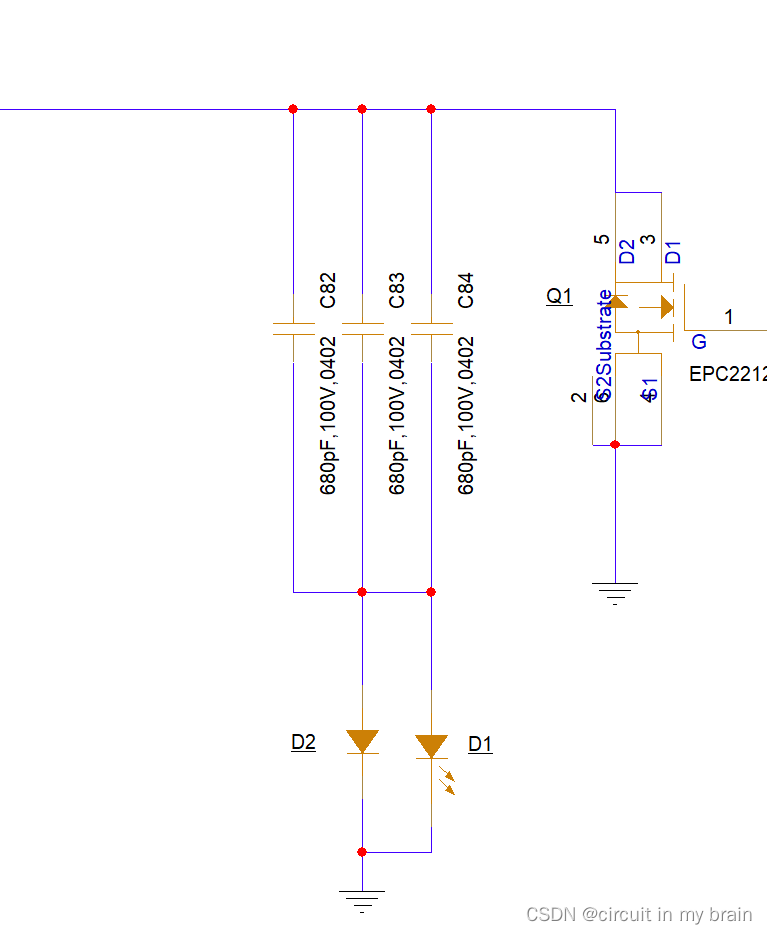
1>激光发射的电路如下图所示。
重点就是要考虑电容、GaN、激光器三部分的布局。
2>第一种布局方式
激光器、GaN、电容三者都在同一层上,放电的回路也都在顶层上,此时临近的第二层没有铺地。
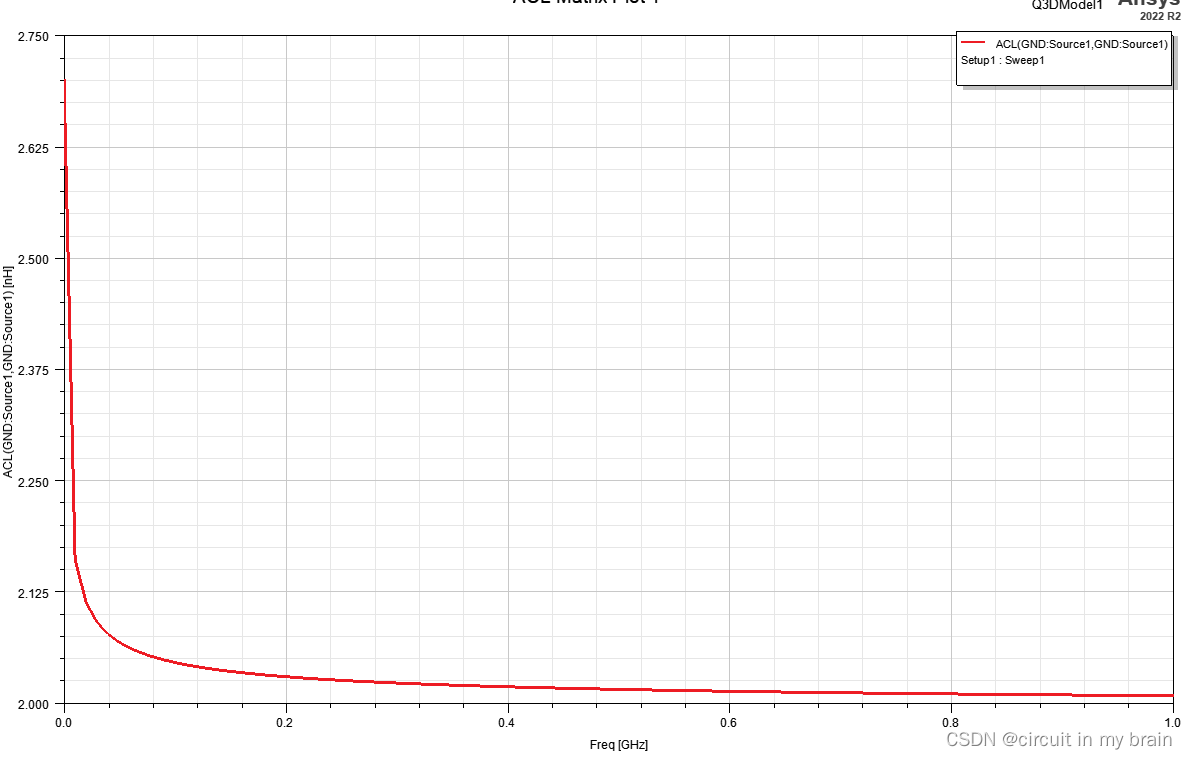
用ANSYS仿真得到此时得回路电感为2nH左右。我们都以500M时得寄生电感来评估。
3>第二种布局的方式
激光器、GaN、电容三者都在同一层上,放电的回路也都在顶层上,但是在紧邻的第二层铺一层完整的地平面。

此时寄生电感只有0.75nH了。这说明第二层铺地的效果非常的明显。
问题:为什么第一、第二两种布局一样,只是多了一层地,寄生电感就可以小了这么的多?
解释:由于涡流的效应,在第二层的平面上产品了涡流,涡流的方向就信号电流的方向相反,那么局部的互感就变大了,从而局部的自感就变小了,所以如果回路只能在同一平面,那么一定要在第二层铺上一块完整的地,而且1、2层距离越近越好。这个涡流也叫做镜像电流。

方块电感的模型

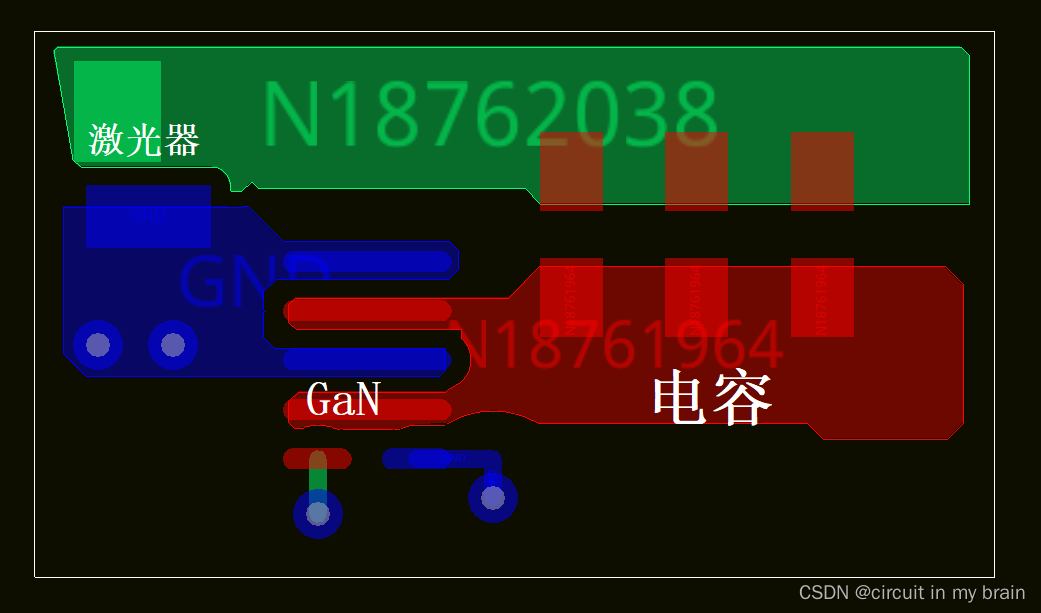
4>第三种的布局方式
下图这种布局的方式激光器、GaN、电容没有在顶层构成回路,第二层的地也参与到了放电回路中,构成一条线的结构。宜普电源的Demo板上也时采用的这种布局方式。

这种布局的寄生电感仅仅只有0.5nH。

第三种布局好的原因分析我们先看下面书上的举例:


回到第三种布局来看,1、2层之间确实可以靠的非常近,有回路电感L= La + Lb -2 * Lab知道,互感增大后,回路的电感是可以减小的,我们这样布局,1、2 层之间的互感是最大的,那么此时的回路电感肯定是最小的。

综上来说,还是第三种布局方式的寄生电感最小。















 8861
8861











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









