







视频讲解:
MuJoCo 相机图片怎么拿?视角调整获取物体图片及实时显示(附代码)
在Mujoco的仿真中,对于识别抓取场景来说,如何获得添加的body等物体的实时图像很重要,今天就分享下如何添加相机视角及可视化小方块(举例)的实时图片。
代码仓库:GitHub - LitchiCheng/mujoco-learning
复制一个scene.xml为scene_withcamera.xml,在xml中添加camera和小方块如下
<worldbody>
<light pos="0 0 1.5" dir="0 0 -1" directional="true"/>
<geom name="floor" size="0 0 0.05" type="plane" material="groundplane"/>
<camera name="rgb_camera" pos="0 0 1.5" euler="0 0 0" fovy="60"/>
<body name="cube" pos="0.75 0 0.05">
<freejoint/>
<geom type="box" size="0.05 0.02 0.06" rgba="1 0 0 1" mass="0.01" friction="3.0 2.0 0.003"/>
</body>
</worldbody>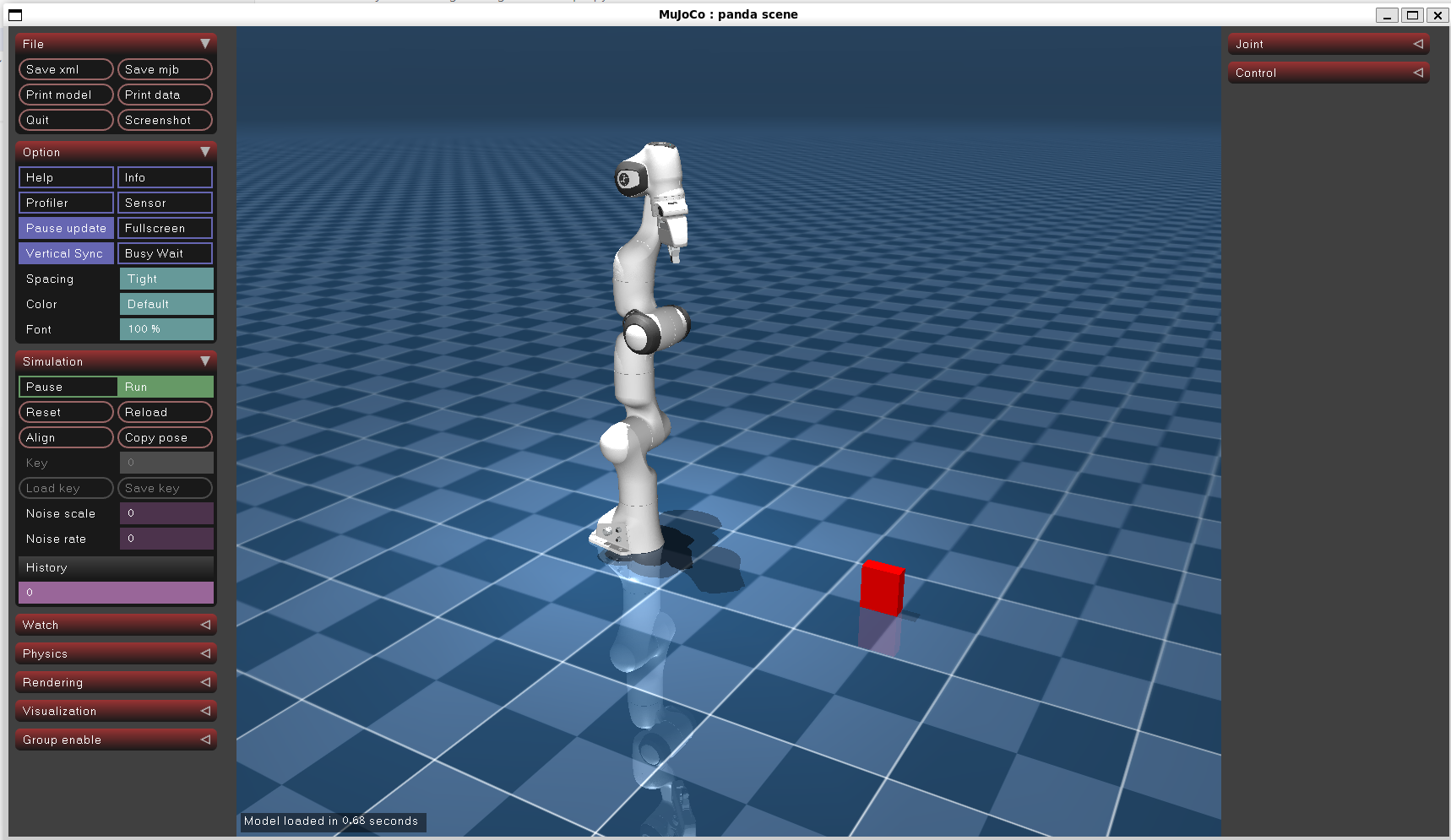
需要创建一个离屏渲染器
resolution = (640, 480)
# 创建OpenGL上下文(离屏渲染)
glfw.init()
glfw.window_hint(glfw.VISIBLE, glfw.FALSE)
window = glfw.create_window(resolution[0], resolution[1], "Offscreen", None, None)
glfw.make_context_current(window)设置xml文件中添加的相机body id
# 设置相机参数
camera_name = "rgb_camera"
camera_id = mujoco.mj_name2id(model, mujoco.mjtObj.mjOBJ_CAMERA, camera_name)
camera = mujoco.MjvCamera()
# 使用固定相机
# camera.type = mujoco.mjtCamera.mjCAMERA_FIXED
# 设置相机为跟踪模式
camera.type = mujoco.mjtCamera.mjCAMERA_TRACKING
if camera_id != -1:
print("camera_id", camera_id)
camera.fixedcamid = camera_id完整代码:
import mujoco
import numpy as np
import glfw
import cv2
resolution = (640, 480)
# 创建OpenGL上下文(离屏渲染)
glfw.init()
glfw.window_hint(glfw.VISIBLE, glfw.FALSE)
window = glfw.create_window(resolution[0], resolution[1], "Offscreen", None, None)
glfw.make_context_current(window)
model = mujoco.MjModel.from_xml_path('./franka_emika_panda/scene_withcamera.xml')
data = mujoco.MjData(model)
scene = mujoco.MjvScene(model, maxgeom=10000)
context = mujoco.MjrContext(model, mujoco.mjtFontScale.mjFONTSCALE_150.value)
# 设置相机参数
camera_name = "rgb_camera"
camera_id = mujoco.mj_name2id(model, mujoco.mjtObj.mjOBJ_CAMERA, camera_name)
camera = mujoco.MjvCamera()
# 使用固定相机
# camera.type = mujoco.mjtCamera.mjCAMERA_FIXED
# 设置相机为跟踪模式
camera.type = mujoco.mjtCamera.mjCAMERA_TRACKING
if camera_id != -1:
print("camera_id", camera_id)
camera.fixedcamid = camera_id
# 创建帧缓冲对象
framebuffer = mujoco.MjrRect(0, 0, resolution[0], resolution[1])
mujoco.mjr_setBuffer(mujoco.mjtFramebuffer.mjFB_OFFSCREEN, context)
while True:
mujoco.mj_step(model, data)
tracking_body_id = mujoco.mj_name2id(model, mujoco.mjtObj.mjOBJ_BODY, "cube")
camera.trackbodyid = tracking_body_id
camera.distance = 1 # 相机与目标的距离
camera.azimuth = 0 # 水平方位角(度)
camera.elevation = -90 # 俯仰角(度)
viewport = mujoco.MjrRect(0, 0, resolution[0], resolution[1])
mujoco.mjv_updateScene(model, data, mujoco.MjvOption(),
mujoco.MjvPerturb(), camera,
mujoco.mjtCatBit.mjCAT_ALL, scene)
mujoco.mjr_render(viewport, scene, context)
rgb = np.zeros((resolution[1], resolution[0], 3), dtype=np.uint8)
mujoco.mjr_readPixels(rgb, None, viewport, context)
# 转换颜色空间 (OpenCV使用BGR格式)
bgr = cv2.cvtColor(np.flipud(rgb), cv2.COLOR_RGB2BGR)
cv2.imshow('MuJoCo Camera Output', bgr)
if cv2.waitKey(1) == 27:
break
cv2.imwrite('debug_output.png', bgr)
cv2.destroyAllWindows()
glfw.terminate()
del context
del scene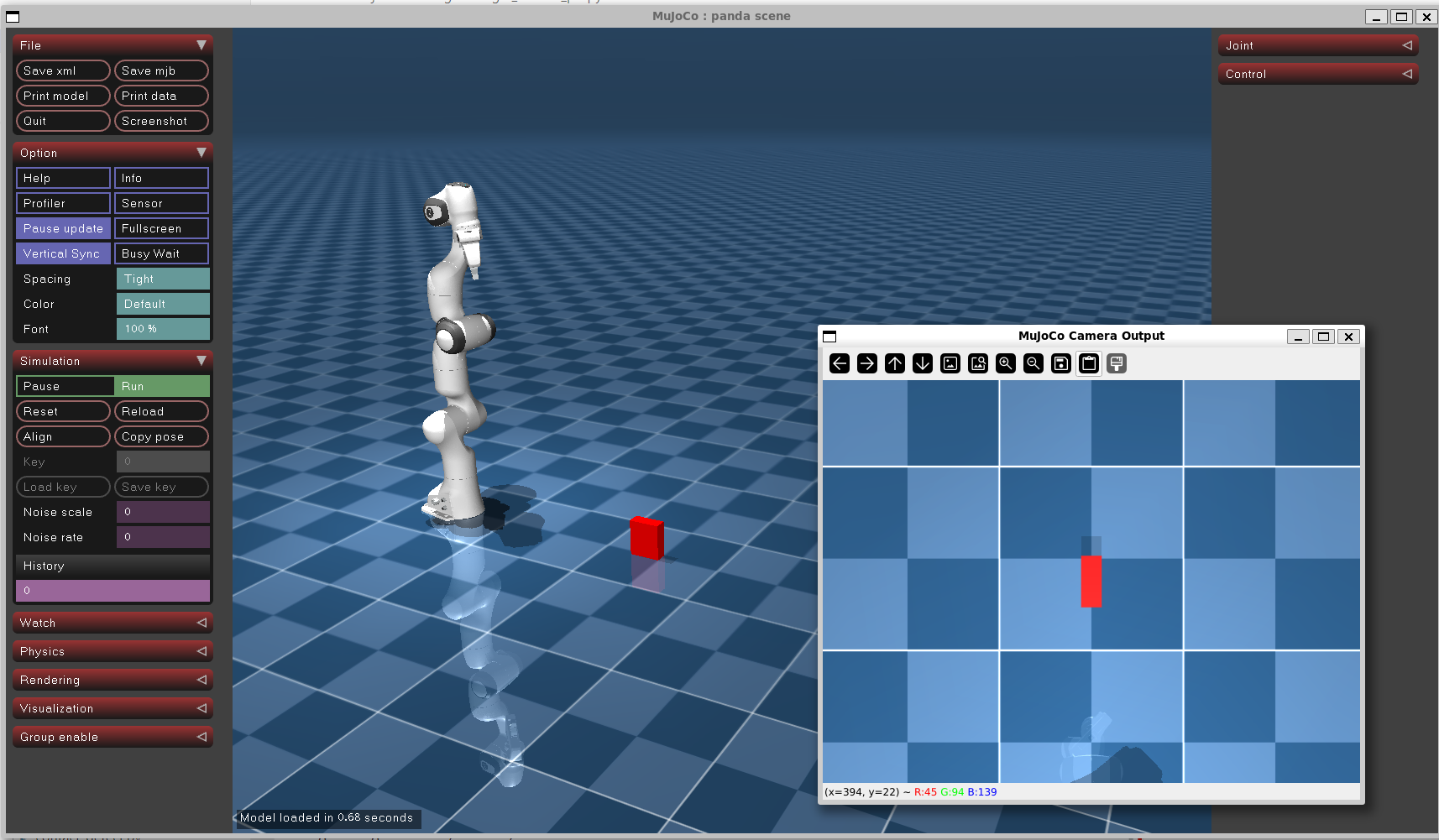

















 2370
2370

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









