







以下是对YOLOv5的C3结构、YOLOv8的C2f结构以及YOLOv11的C3k2结构的系统对比分析,从模块设计、功能优化、性能差异等角度展开:
1. YOLOv5的C3模块
核心设计
-
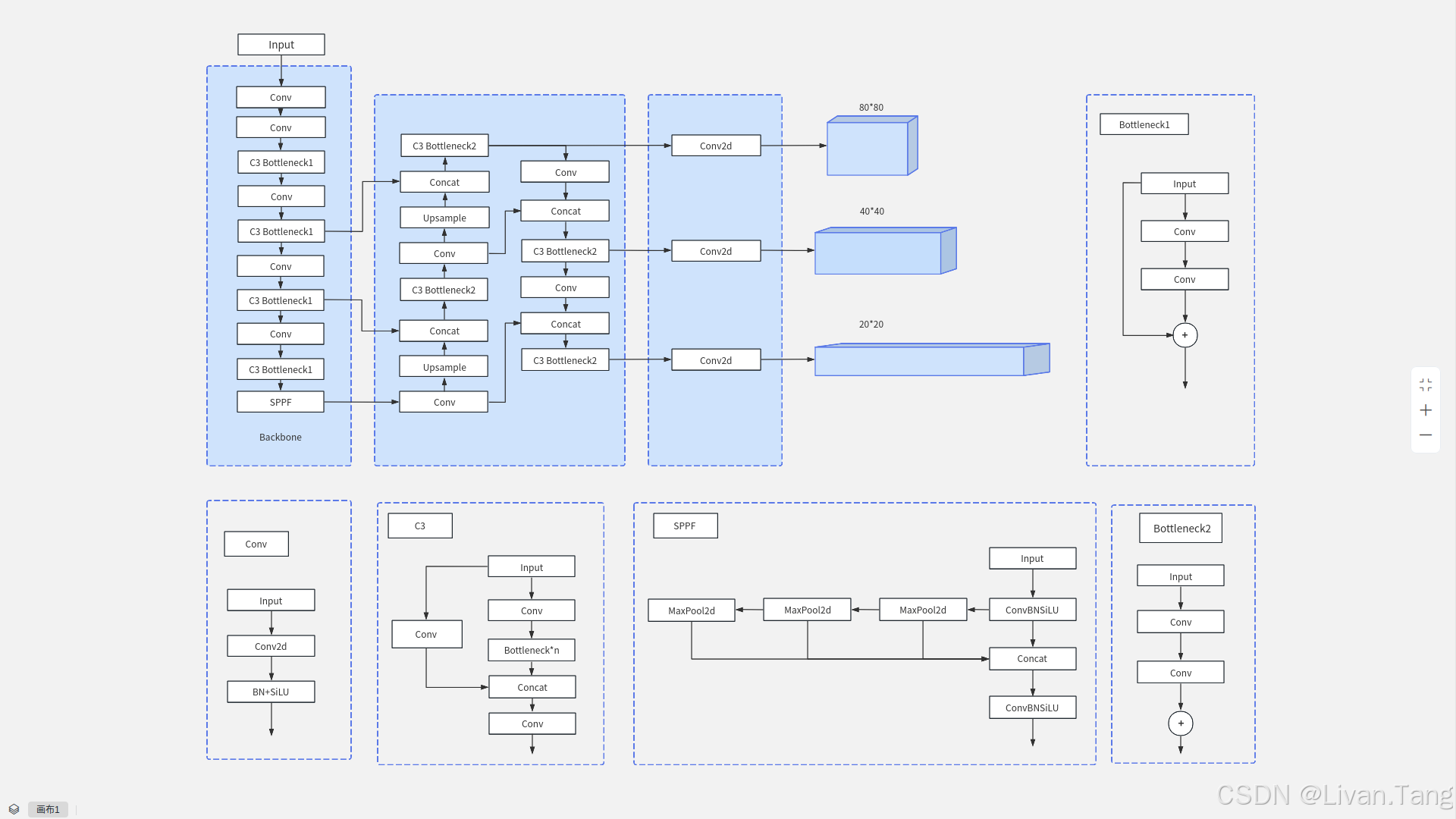
结构特点:C3模块基于CSPNet(Cross Stage Partial Network)思想,由三个卷积层构成,分为两条分支:一条通过多个Bottleneck模块堆叠,另一条直接进行卷积操作,最终将两条分支的特征图拼接后输出。
-
参数配置:
-
默认启用
shortcut连接,但仅在Backbone中使用,Head中关闭。 -
使用
nn.Sequential堆叠Bottleneck模块,导致梯度流仅通过最后一个Bottleneck传递。
-
-
功能目标:
-
减少计算冗余,缓解梯度消失问题。
-
通过特征图分割与合并,提升特征复用效率。
-
性能表现
-
计算量:C3模块的参数和FLOPs相对较高,但通过CSP设计平衡了计算效率和精度。
-
适用场景:适用于对计算资源要求不苛刻的场景,如YOLOv5的中大型模型(YOLOv5m/YOLOv5l)。
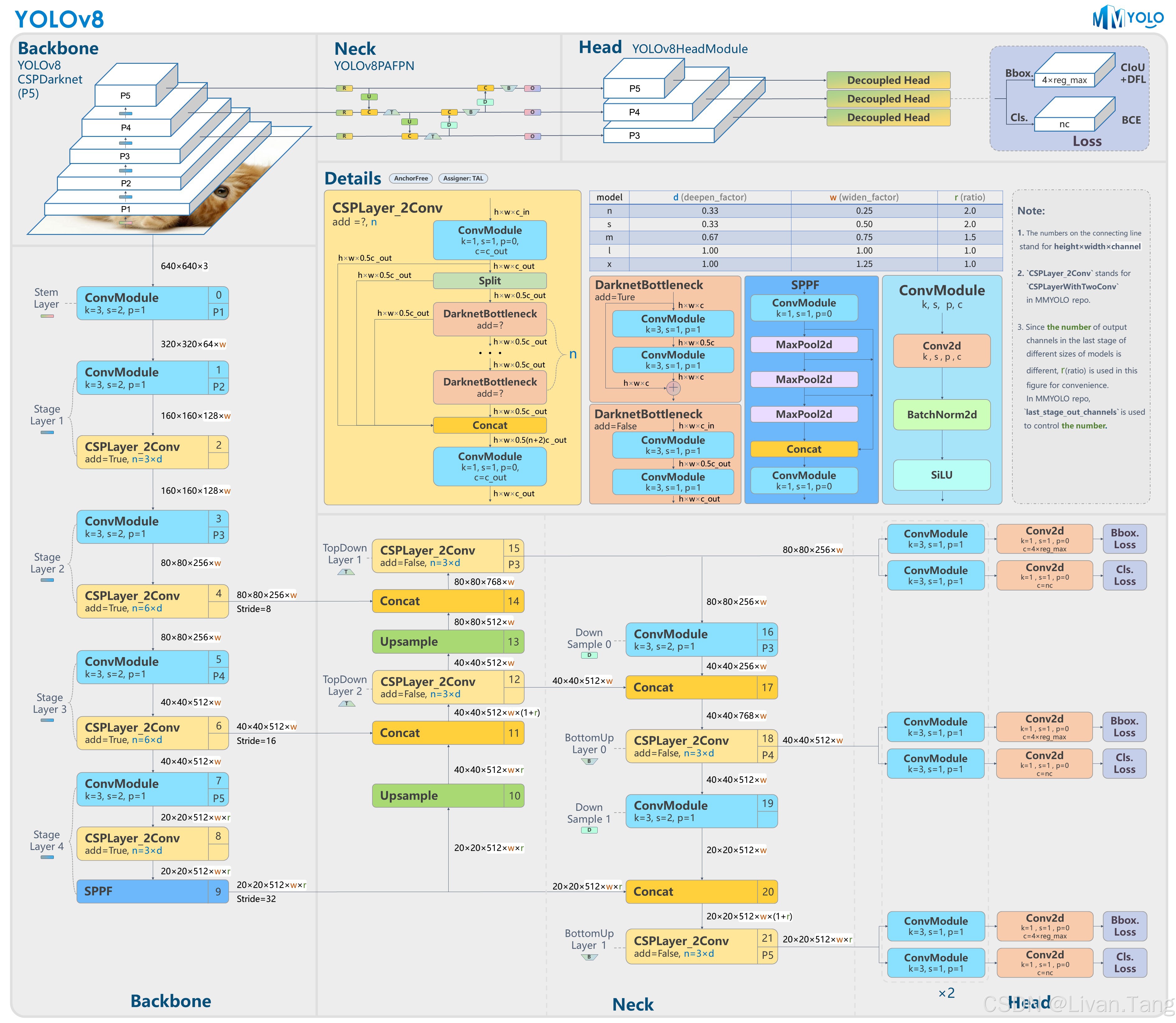
2. YOLOv8的C2f(CSPlayer_2Conv)模块
核心设计
-
结构改进:
-
结合了C3模块和YOLOv7的ELAN(Efficient Layer Aggregation Network)思想,通过多分支连接增强梯度流。
-
使用
nn.ModuleList动态管理Bottleneck模块,每个Bottleneck的输出均被保留并拼接,而非仅取最终结果。 -
默认关闭
shortcut连接,仅在Backbone中按需启用。
-
-
参数优化:
-
引入轻量化设计,如将第一个卷积的核大小从1x1改为3x3,恢复类似ResNet的Bottleneck结构。
-
通过更灵活的通道数调整(如
width_multiple参数)减少冗余参数。
-
性能提升
-
梯度流增强:多分支连接使梯度传播路径更丰富,提升了特征提取能力。
-
计算效率:在COCO数据集上,C2f模块的参数比C3减少22%,推理速度提升约2%。
-
硬件兼容性:因包含
Split操作,对部分硬件部署(如边缘设备)的适配性稍差。
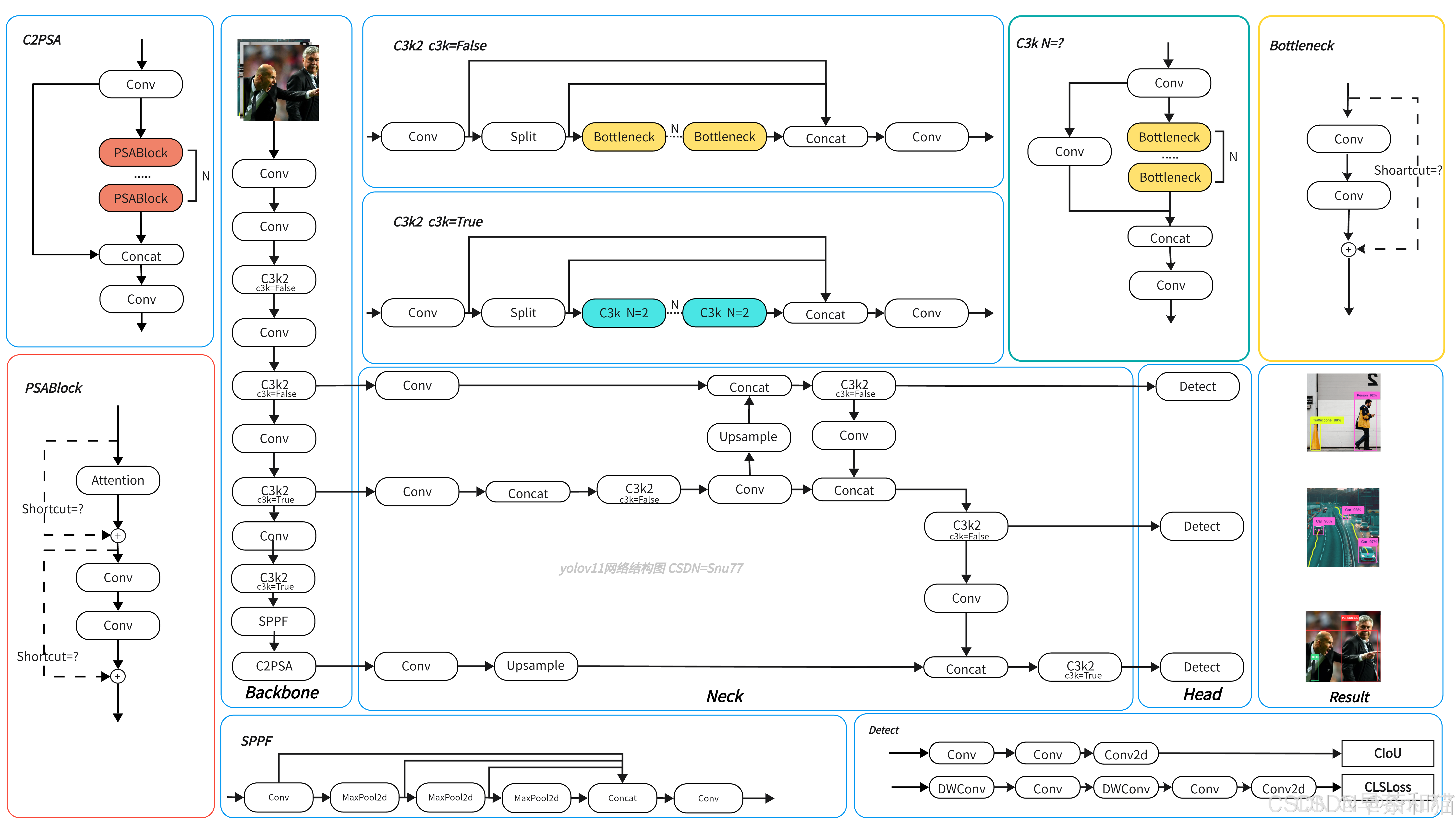
3. YOLOv11的C3k2模块
核心设计
-
结构融合:
-
结合C3模块和C2f模块的特点,通过参数
c3k控制Bottleneck的类型:若为False,则退化为类似C2f的结构;若为True,则使用改进的C3k模块(支持自定义卷积核)。 -
在浅层网络中禁用
c3k参数,减少计算量;深层网络启用以增强特征提取。
-
-
创新技术:
-
引入深度可分离卷积(DWConv)和自适应锚框机制,进一步降低参数量。
-
嵌入PSA(金字塔空间注意力)机制,提升对复杂场景的适应性。
-
性能优势
-
动态调整:根据网络深度灵活切换模块类型,平衡了浅层的高效性和深层的表达能力。
-
精度与速度平衡:在COCO数据集上,YOLOv11的模型参数比YOLOv8减少22%,同时保持更高的mAP。
对比总结
| 特性 | YOLOv5 C3 | YOLOv8 C2f | YOLOv11 C3k2 |
|---|---|---|---|
| 核心思想 | CSPNet + 单分支堆叠 | ELAN多分支 + CSPNet | 动态C3k/C2f混合结构 |
| 梯度流设计 | 仅通过最后Bottleneck | 多分支拼接,梯度流更丰富 | 根据参数动态调整分支连接 |
| 参数效率 | 较高(默认启用Shortcut) | 轻量化(参数减少22%) | 进一步优化(自适应锚框) |
| 硬件适配性 | 较高(无复杂操作) | 较差(含Split操作) | 中等(依赖配置参数) |
| 典型应用场景 | 通用目标检测 | 实时检测与轻量化部署 | 复杂场景下的高精度检测 |
关键差异点
-
梯度传播路径:
-
C3模块的梯度仅通过最后一个Bottleneck传递,可能导致信息损失。
-
C2f和C3k2通过多分支保留中间层输出,增强了特征的多样性和梯度流。
-
-
模块灵活性:
-
C3k2通过
c3k参数实现动态结构切换,比C2f更具适应性。
-
-
计算效率:
-
C2f通过轻量化设计减少参数,而C3k2通过深度可分离卷积进一步优化计算量。
-
结论
-
YOLOv5 C3:适合对计算资源要求不高的场景,结构简单但梯度流受限。
-
YOLOv8 C2f:在轻量化和实时性上表现突出,但硬件适配性需优化。
-
YOLOv11 C3k2:通过动态结构和注意力机制,更适合复杂场景的高精度需求,但实现复杂度较高。
总结一下,C3结构在YOLOv5中是CSP的典型应用,通过分离和合并特征来减少计算量,默认使用shortcut。而YOLOv8的C2f引入了类似ELAN的多分支结构,连接所有中间层的输出,增强梯度流,但可能增加计算量。YOLOv11的C3k2则结合了C2f和C3k模块的灵活性,根据参数调整结构,进一步优化特征提取和计算效率。需要从模块结构、梯度流、参数设置和硬件适应性几个方面来详细对比。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









