










概述
PiecewiseJerkPathProblem类是apollo planning模块下modules\planning\math\piecewise_jerk\piecewise_jerk_path_problem.cc/.h实现
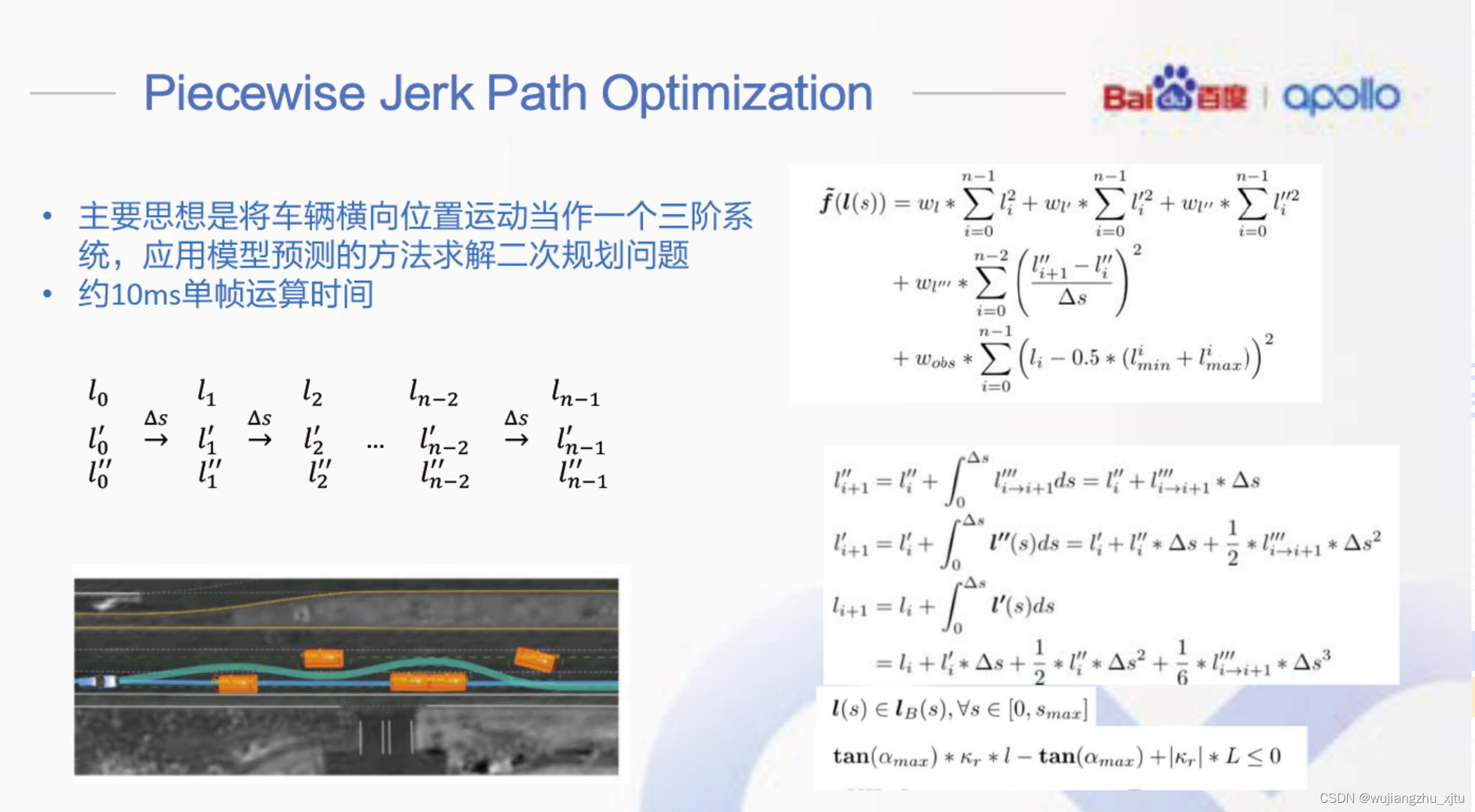
从类名来看,应该是PiecewiseJerkPathProblem是分段匀加加速度运动路径问题
从代码来看PiecewiseJerkPathProblem类主要是实现:
对横向路径二次规划优化问题进行构建,主要是构建P矩阵和q矩阵,对横向d,d’,d’‘,d’''以及d偏离dref的距离按照一定的权重计算cost求出最优的路径这个优化问题的构建,但约束并不在该类里设置,而是在调用时通过该类的基类对优化进行设置。
简而言之,该类是路径优化的二次规划问题里的P,q矩阵的构建
*以一个计算示例来说明osqp问题的设置及求解(待上传20220819)
参考链接:
Apollo路径优化
piecewise_jerk_path_problem.h
#pragma once
#include <utility>
#include <vector>
#include "modules/planning/math/piecewise_jerk/piecewise_jerk_problem.h"
namespace apollo {
namespace planning {
/*
* @brief:
* FEM stands for finite element method.FEM代表有限元方法?
* This class solve an optimization problem:这个类是求解一个优化问题
* 每一个s对应的横向偏移合起来就是路径path
* x
* |
* | P(s1, x1) P(s2, x2)
* | P(s0, x0) ... P(s(k-1), x(k-1))
* |P(start)
* |
* |________________________________________________________ s
*
* we suppose s(k+1) - s(k) == s(k) - s(k-1)
* 我们认为相邻离散点的纵向间隔是一样的
*
* Given the x, x', x'' at P(start), The goal is to find x0, x1, ... x(k-1)
* 给定初始的横向状态d0,d0',d0'',目标就是求解出最优的d0,d1,...dk-1使得整个路径最平滑
* which makes the line P(start), P0, P(1) ... P(k-1) "smooth".
*/
//公有继承PiecewiseJerkProblem分段加加速度问题类
class PiecewiseJerkPathProblem : public PiecewiseJerkProblem {
public:
//分段加加速度路径优化问题类带参构造函数,输入参数离散点数量也是输入的横向边界采样点的数量,delta_s离散点的纵向间隔1.0m,x_init横向的初始状态d0,d0',d0''
PiecewiseJerkPathProblem(const size_t num_of_knots, const double delta_s,
const std::array<double, 3>& x_init);
virtual ~PiecewiseJerkPathProblem() = default;
protected:
//构建二次规划问题的P矩阵,以CSC稀疏矩阵的格式储存到输入的3个指针数组里
//P_indices P矩阵行索引数组
//P_indptr P矩阵列索引数组
//P_data P矩阵上面行列索引对应的元素值的数组
void CalculateKernel(std::vector<c_float>* P_data,
std::vector<c_int>* P_indices,
std::vector<c_int>* P_indptr) override;
//构建二次规划问题的q矩阵,构建结果储存到输入的指针q里
void CalculateOffset(std::vector<c_float>* q) override;
};
} // namespace planning
} // namespace apollo
piecewise_jerk_path_problem.cc
#include "modules/planning/math/piecewise_jerk/piecewise_jerk_path_problem.h"
#include "cyber/common/log.h"
#include "modules/planning/common/planning_gflags.h"
namespace apollo {
namespace planning {
//类的带参构造函数
//输入参数:num_of_knots离散点的数量,调用时输入的是横向边界里的元素的数量,横向边界{(d0_lower,d0_upper),(d1_lower,d1_upper)...}
//输入参数:x_init初始的状态(s,s',s''或d,d',d'')
//输入参数:delta_s各个横线边界或者是离散点之间对应的纵向间隔s=1.0m
PiecewiseJerkPathProblem::PiecewiseJerkPathProblem(
const size_t num_of_knots, const double delta_s,
const std::array<double, 3>& x_init)
//这些参数用来初始化另一个类PiecewiseJerkProblem
: PiecewiseJerkProblem(num_of_knots, delta_s, x_init) {}
//计算内核,又是QP问题,输入又是一个CSC格式的P矩阵,求得的P矩阵按CSC格式存入输入的3个参数中,CSC稀疏矩阵储存,仅储存对角线元素以及其平行的对角元素,省略掉大量的0元素,对于大型矩阵的运算速度大大增加
//P_indices P矩阵行索引数组
//P_indptr P矩阵列索引数组
//P_data P矩阵上面行列索引对应的元素值的数组
void PiecewiseJerkPathProblem::CalculateKernel(std::vector<c_float>* P_data,
std::vector<c_int>* P_indices,
std::vector<c_int>* P_indptr) {
//将离散点的数量赋值给n
const int n = static_cast<int>(num_of_knots_);
//则变量的个数应该就是二次规划QP问题里1/2X^T*P*X+q^T*X变量X的元素的数量,n个离散时间采样点,每个时刻对应的状态有3个(s,s',s''或d,d',d'')
const int num_of_variables = 3 * n;
//非零元素的个数 = X的元素的数量 + n - 1 = 4n-1?
const int num_of_nonzeros = num_of_variables + (n - 1);
//定义了一个columns来储存P矩阵的各列
std::vector<std::vector<std::pair<c_int, c_float>>> columns(num_of_variables);
int value_index = 0;
// x(i)^2 * (w_x + w_x_ref[i]), w_x_ref might be a uniform value for all x(i)
// or piecewise values for different x(i)
//这一项是构建cost函数里对横向偏移量项及避障时导致横向boundary的中心线对参考线的偏移项构成, Wd*∑d^2 + Wdref*∑(d-(dmin+dmax)/2)^2这两项之和把d^2项系数合并就是这个for循环干的事。注:Wdref*∑dmax^2这是一个常数项,求cost函数最小值时可以直接忽略,scale_factor_[0],scale_factor_[1],scale_factor_[2]都是1,weight_x_ref_vec_基本也是个常数项,调用时好像都一样
//设置P矩阵中
for (int i = 0; i < n - 1; ++i) {
columns[i].emplace_back(i, (weight_x_ + weight_x_ref_vec_[i]) /
(scale_factor_[0] * scale_factor_[0]));
++value_index;
}
// x(n-1)^2 * (w_x + w_x_ref[n-1] + w_end_x)
// x(n-1)^2 * (w_x + w_x_ref[n-1])这个其实跟上面的for循环干的一件事,只是因为上面的for循环没有到第n项(下标n-1),,但不同的是,这里针对第n个离散横向采样点偏移的平方加了一个终端状态的权重weight_end_state_[0],但是貌似weight_end_state_[0],weight_end_state_[1],weight_end_state_[2]全部为0,直接把第n项横向偏移的平方惩罚项合并到上面那个for循环算了
columns[n - 1].emplace_back(
n - 1, (weight_x_ + weight_x_ref_vec_[n - 1] + weight_end_state_[0]) /
(scale_factor_[0] * scale_factor_[0]));
++value_index;
// x(i)'^2 * w_dx
//这个for循环是设置P矩阵中每个离散采样点d'^2的惩罚项的权重,对横向偏移量变化率的权重
for (int i = 0; i < n - 1; ++i) {
columns[n + i].emplace_back(
n + i, weight_dx_ / (scale_factor_[1] * scale_factor_[1]));
++value_index;
}
// x(n-1)'^2 * (w_dx + w_end_dx) 本来是想对对终端的一阶横向状态单独处理,但是实际上weight_end_state_[1]=0,所以完全终端状态的一阶横向状态可以和上面的for循环合并
columns[2 * n - 1].emplace_back(2 * n - 1,
(weight_dx_ + weight_end_state_[1]) /
(scale_factor_[1] * scale_factor_[1]));
++value_index;
//横向离散采样点的纵向间隔delta_s_ 通常为1.0m,这里求了个平方是做什么的?
auto delta_s_square = delta_s_ * delta_s_;
// x(i)''^2 * (w_ddx + 2 * w_dddx / delta_s^2)
//这个是对横向状态二阶d''项平方进行惩罚,weight_dddx_ / delta_s_square其实是拆分了一部分加加速度的平方项 加加速度平方项cost=weight_dddx_ ∑(d''(k+1)-d''(k))/delta_s)^2
columns[2 * n].emplace_back(2 * n,
(weight_ddx_ + weight_dddx_ / delta_s_square) /
(scale_factor_[2] * scale_factor_[2]));
++value_index;
for (int i = 1; i < n - 1; ++i) {
columns[2 * n + i].emplace_back(
2 * n + i, (weight_ddx_ + 2.0 * weight_dddx_ / delta_s_square) /
(scale_factor_[2] * scale_factor_[2]));
++value_index;
}
//横向加加速度平方项cost(部分)以及横向加速度的平方项cost,其实weight_end_state_[2]=0,注意这里的加速度和加加速度都是横向d对纵向位置s求导
columns[3 * n - 1].emplace_back(
3 * n - 1,
(weight_ddx_ + weight_dddx_ / delta_s_square + weight_end_state_[2]) /
(scale_factor_[2] * scale_factor_[2]));
++value_index;
// -2 * w_dddx / delta_s^2 * x(i)'' * x(i + 1)''
//这一块仍然是横向加加速度约束,横向加加速度写成横向加速度的差分形式的平方后,交叉项的权重由这个for循环实现写入P矩阵
for (int i = 0; i < n - 1; ++i) {
columns[2 * n + i].emplace_back(2 * n + i + 1,
(-2.0 * weight_dddx_ / delta_s_square) /
(scale_factor_[2] * scale_factor_[2]));
++value_index;
}
CHECK_EQ(value_index, num_of_nonzeros);
int ind_p = 0;
//P_indices P矩阵行索引数组
//P_indptr P矩阵列索引数组
//P_data P矩阵上面行列索引对应的元素值的数组
//将上述写入columns的数据按CSC稀疏矩阵格式储存矩阵P
for (int i = 0; i < num_of_variables; ++i) {
P_indptr->push_back(ind_p);
for (const auto& row_data_pair : columns[i]) {
P_data->push_back(row_data_pair.second * 2.0);
P_indices->push_back(row_data_pair.first);
++ind_p;
}
}
P_indptr->push_back(ind_p);
}
//Wdref*∑(d-(dmin+dmax)/2)^2计算路径因为避障车道左右边界中心线偏离道路参考线的cost中的交叉项由二次规划的q^T*X项实现,也就是这里的计算offset,由于1/2X^TPX中的1/2为了化成1,所以q^T*X的权重要乘以个2
void PiecewiseJerkPathProblem::CalculateOffset(std::vector<c_float>* q) {
CHECK_NOTNULL(q);
const int n = static_cast<int>(num_of_knots_);
const int kNumParam = 3 * n;
q->resize(kNumParam, 0.0);
if (has_x_ref_) {
for (int i = 0; i < n; ++i) {
q->at(i) += -2.0 * weight_x_ref_vec_.at(i) * x_ref_[i] / scale_factor_[0];
}
}
if (has_end_state_ref_) {
q->at(n - 1) +=
-2.0 * weight_end_state_[0] * end_state_ref_[0] / scale_factor_[0];
q->at(2 * n - 1) +=
-2.0 * weight_end_state_[1] * end_state_ref_[1] / scale_factor_[1];
q->at(3 * n - 1) +=
-2.0 * weight_end_state_[2] * end_state_ref_[2] / scale_factor_[2];
}
}
} // namespace planning
} // namespace apollo
以一个例子说明P,q矩阵是如何构建的
约束条件呢?
约束条件















 916
916











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











