







一、安装运行:
直接来指令吧:
sudo apt-get install ros-kinetic-gazebo-ros-pkgs ros-kinetic-gazebo-ros-control
运行一下:
roscore
rosrun gazebo_ros gazebo
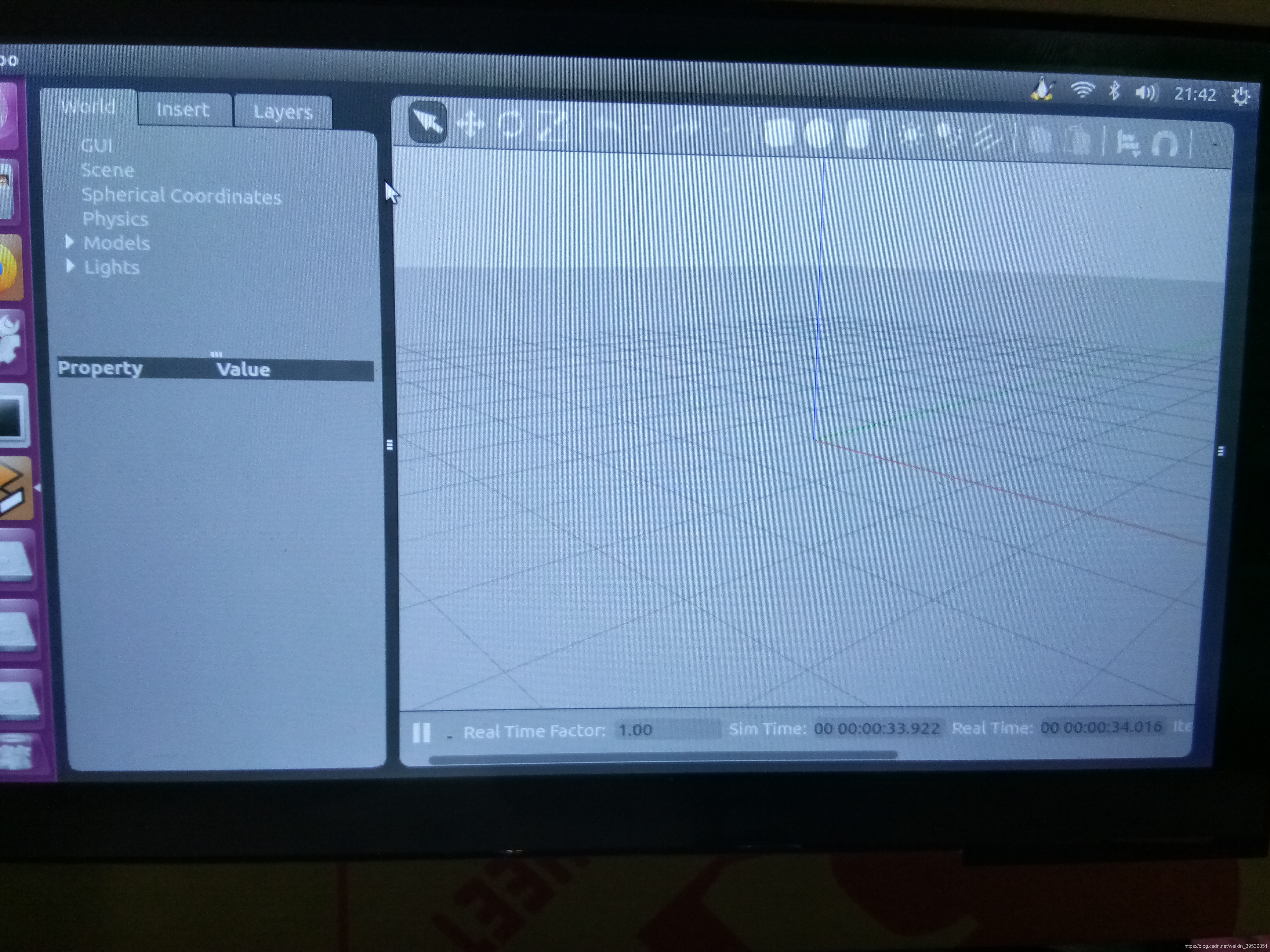
如果有上边Gazebo界面出现就表明安装成功了!
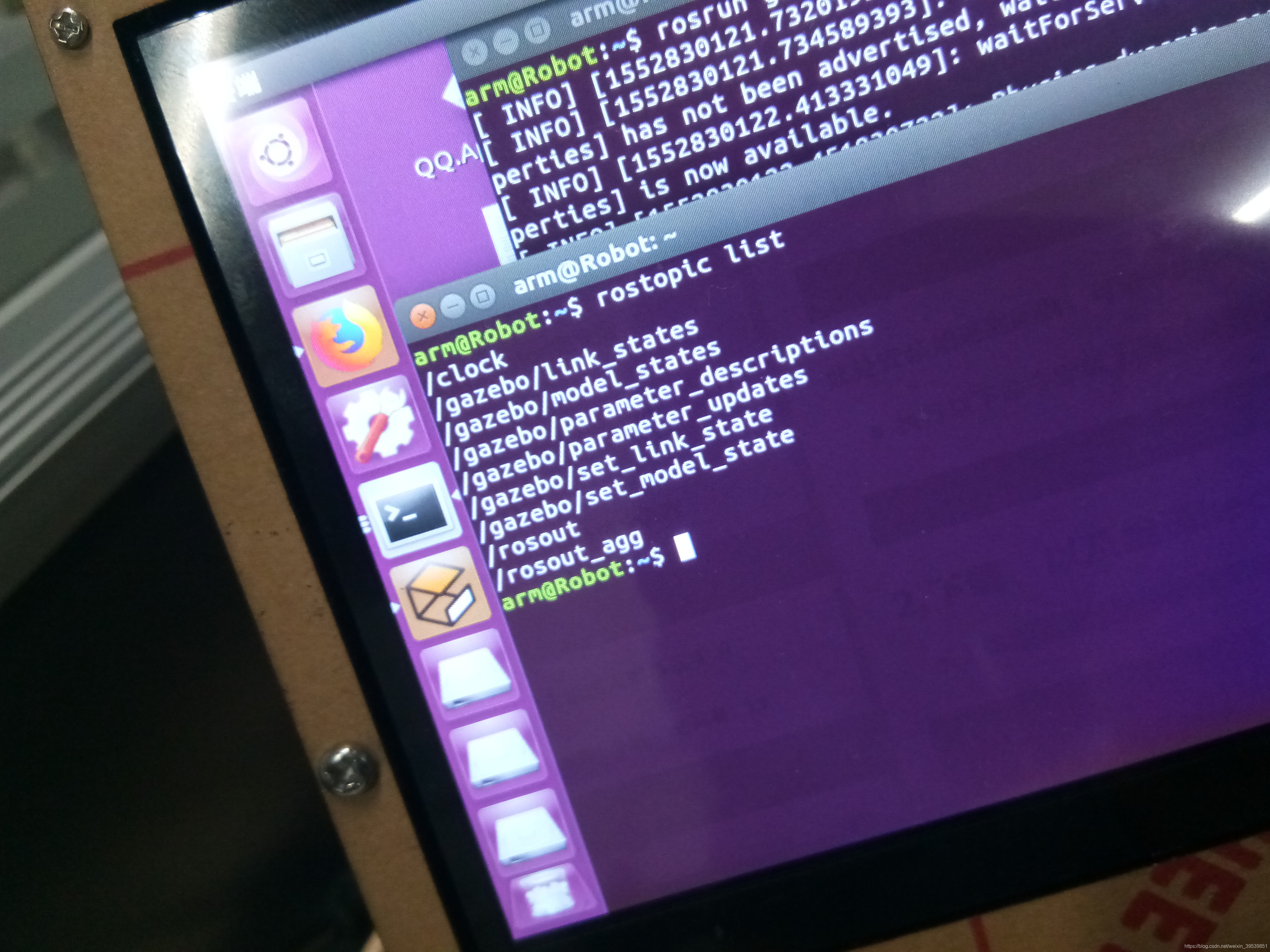
验证Gazebo是否与ROS系统成功连接,可以查看ROS的话题列表和服务列表!
rostopic list
一、安装运行:
直接来指令吧:
sudo apt-get install ros-kinetic-gazebo-ros-pkgs ros-kinetic-gazebo-ros-control
运行一下:
roscore
rosrun gazebo_ros gazebo
如果有上边Gazebo界面出现就表明安装成功了!
验证Gazebo是否与ROS系统成功连接,可以查看ROS的话题列表和服务列表!
rostopic list
 571
7046
571
7046











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















