







 本文介绍了在ROS环境下,使用机械臂进行导航时遇到的正向运动学求解问题。重点讨论了关节空间的路径规划,并强调了控制器配置的注意事项,如controller命名必须与moveit的controllers.yaml文件中设置一致。通过正确配置并启动相关launch文件,成功实现了机械臂到达预设位姿的目标。
本文介绍了在ROS环境下,使用机械臂进行导航时遇到的正向运动学求解问题。重点讨论了关节空间的路径规划,并强调了控制器配置的注意事项,如controller命名必须与moveit的controllers.yaml文件中设置一致。通过正确配置并启动相关launch文件,成功实现了机械臂到达预设位姿的目标。
有时已经知道机械臂目标位姿的各关节信息,对于这种情况,我们用moveit可以很简单的将机械臂移动到目标位姿。
本篇主要是参考《ROS by example (volume 2)》里的实例,在pi_robot代码的基础上修改。
还有一些资料:http://www.360doc.com/content/16/0825/16/7821691_585865831.shtml
一、配置moveit关节控制器
ArbotiX的包提供了一个JTAC(Joint Trajectory Action Controller),它一方面直接控制伺服电机,另一方面使用Ros中的FollowJointTrajectoryAction去接收程序发过来的joint轨迹目标。
所以:需要做的有2点:
(1)配置一个底层硬件实际用到的JTAC。 这个JTAC会负责接收FollowJointTrajectoryAction内容。
(2)配置一个moveit!插件,这个插件负责将JTAC与moveit!之间的通信抽象化。 这个插件叫moveit_simple_controller_manager,它可以配合FollowJointTrajectoryAction工作。
需要我们自己做的事情就是配置参数将它们联系起来(topic和actions的名字)
1、创建controllers.yaml文件
这个文件放置在moveit配置文件的config目录下,我们用来测试的机械臂没有抓取的手爪,只用到了right_arm_controller这个控制器。
2、创建控制器管理器启动文件robot_arm_moveit_controller_manager.launch.xml
二、关节空间的正运动学规划
1、用arbotix关节控制器启动虚拟机械臂模型
文件代码内容如下:(我是在教材例子中进行修改的,与机械臂控制无关的部分,比如right_gripper_controller,已经被注释掉了)
大致内容是;
(1)加载urdf模型
(2)启动arbotix,包括上面我们提到的配置的一些控制器
(3)启动tf节点,这里是我参考其他的文件时加上的。我在调试时,没有这个tf节点,规划过程中可以plan()出规划结果,但是excute()失败,加上之后就可以了,具体原因还不清楚,找到后,我会再补充。目前猜测可能是odom坐标系与机械臂的base_link之间缺少tf关系。
(4)启动robot_state_publisher
本篇主要是参考《ROS by example (volume 2)》里的实例,在pi_robot代码的基础上修改。
还有一些资料:http://www.360doc.com/content/16/0825/16/7821691_585865831.shtml
一、配置moveit关节控制器
ArbotiX的包提供了一个JTAC(Joint Trajectory Action Controller),它一方面直接控制伺服电机,另一方面使用Ros中的FollowJointTrajectoryAction去接收程序发过来的joint轨迹目标。
所以:需要做的有2点:
(1)配置一个底层硬件实际用到的JTAC。 这个JTAC会负责接收FollowJointTrajectoryAction内容。
(2)配置一个moveit!插件,这个插件负责将JTAC与moveit!之间的通信抽象化。 这个插件叫moveit_simple_controller_manager,它可以配合FollowJointTrajectoryAction工作。
需要我们自己做的事情就是配置参数将它们联系起来(topic和actions的名字)
1、创建controllers.yaml文件
controller_list:
- name: right_arm_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- joint_1
- joint_2
- joint_3这个文件放置在moveit配置文件的config目录下,我们用来测试的机械臂没有抓取的手爪,只用到了right_arm_controller这个控制器。
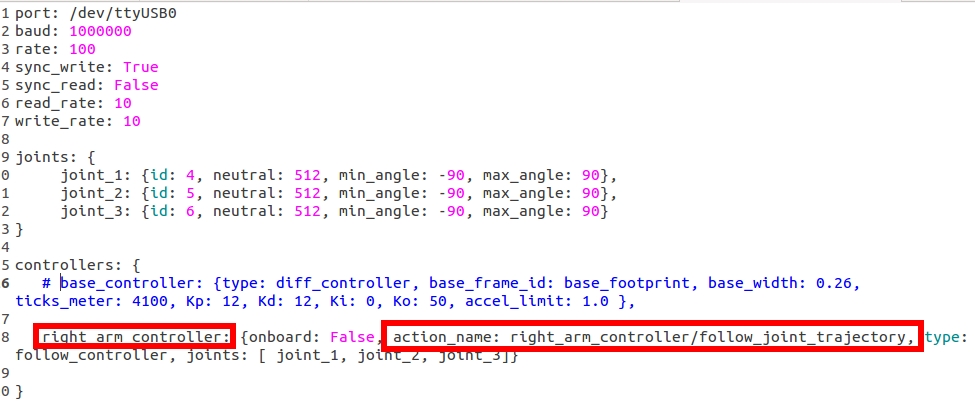
注意:这个right_arm_controller控制器命名可以修改,但是与当初我们测试arbotix时的配置文件有关。我们当初学习arbotix节点控制伺服电机时,为arbotix配置了文件,名为:my_robot_arbotix.yaml,在里面我们命名了一些控制器controller,这里的controller命名、action_name必须要与moveit配置里的controllers.yaml文件中设置的action_ns相匹配。
2、创建控制器管理器启动文件robot_arm_moveit_controller_manager.launch.xml
这个文件放置在moveit配置文件的launch目录下,他会读取我们的controllers.yaml中设置好的控制器参数。
<launch>
<!-- Set the param that trajectory_execution_manager needs to find the controller plugin -->
<arg name="moveit_controller_manager" default="moveit_simple_controller_manager/MoveItSimpleControllerManager" />
<param name="moveit_controller_manager" value="$(arg moveit_controller_manager)"/>
<!-- load controller_list -->
<arg name="use_controller_manager" default="true" />
<!-- Load joint controller configurations from YAML file to parameter server -->
<rosparam file="$(find arm_moveit_config)/config/controllers.yaml"/>
</launch>二、关节空间的正运动学规划
1、用arbotix关节控制器启动虚拟机械臂模型
xs@xs-PC:~/catkin_ws2/src/mybot_description/launch$ roslaunch my_robot_arbotix_ok.launch
文件代码内容如下:(我是在教材例子中进行修改的,与机械臂控制无关的部分,比如right_gripper_controller,已经被注释掉了)
大致内容是;
(1)加载urdf模型
(2)启动arbotix,包括上面我们提到的配置的一些控制器
(3)启动tf节点,这里是我参考其他的文件时加上的。我在调试时,没有这个tf节点,规划过程中可以plan()出规划结果,但是excute()失败,加上之后就可以了,具体原因还不清楚,找到后,我会再补充。目前猜测可能是odom坐标系与机械臂的base_link之间缺少tf关系。
(4)启动robot_state_publisher
<launch>
<!-- Make sure we are not using simulated time -->
<param name="/use_sim_time" value="false" />
<!-- Launch the arbotix driver in fake mode by default -->
<arg name="sim" default="true" />
<!-- If using a real controller, look on /dev/ttyUSB0 by default -->
<arg name="port" default="/dev/ttyUSB0" />
<!-- Load the URDF/Xacro model of our robot -->
<param name="robot_description" textfile="/home/xs/catkin_ws2/src/mybot_description/urdf/robot_arm.urdf" />
<!-- Bring up the arbotix driver with a configuration file appropriate to the robot -->
<node name="arbotix" pkg= 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









